自移动机器人的制作方法
本发明涉及机器人,具体涉及一种自移动机器人。
背景技术:
1、随着机器人技术的发展,机器人可在外部环境中进行自动导航以执行相应任务。外部环境比较复杂,机器人在移动过程中比较容易遇到垂悬障碍物。机器人遇到垂悬障碍物时,由于机器人的碰撞传感器并未被触发,机器人误以为前方并不存在障碍物,因此,机器人保持原速穿过垂悬障碍物时,垂悬障碍物容易困住机器人,使得机器人进退两难。
技术实现思路
1、本发明实施例的一个目的旨在提供一种自移动机器人,能够有效地在垂悬障碍物下进行脱困。
2、在第一方面,本发明实施例提供一种自移动机器人,包括:
3、机器人主体;
4、行走组件,安装于所述机器人主体上;
5、顶壳组件,可转动地安装于所述机器人主体上;
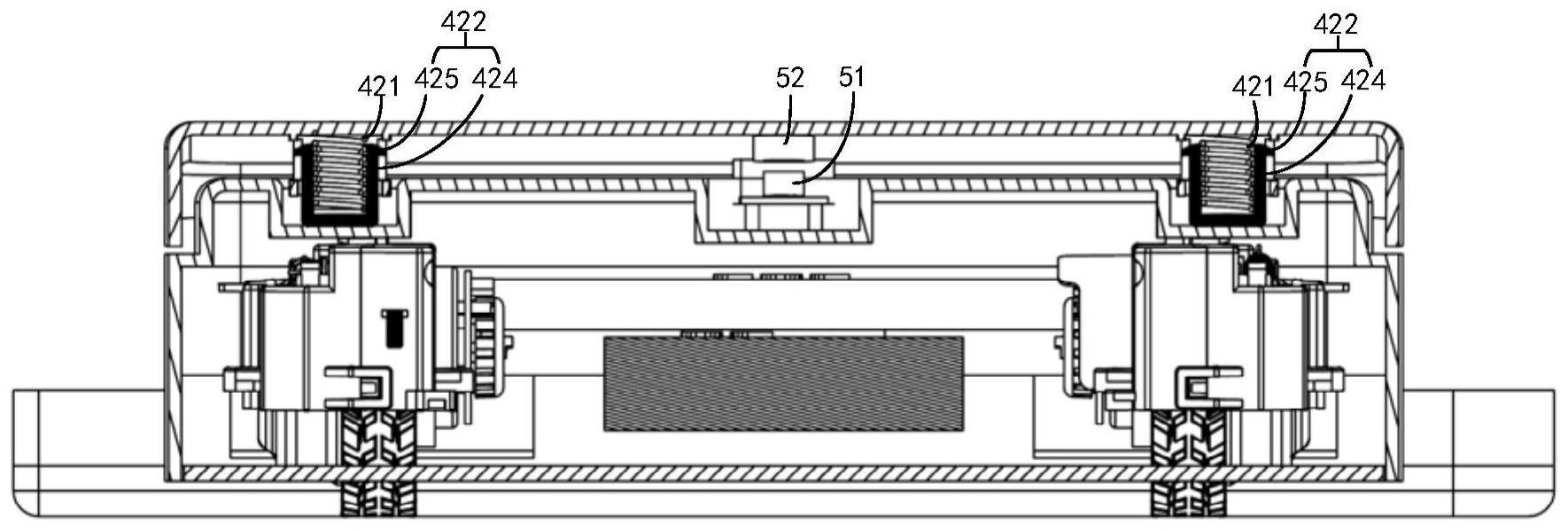
6、传感组件,包括感应件与触发件,所述感应件安装于所述机器人主体上,所述触发件安装于所述顶壳组件上,所述顶壳组件可在垂悬障碍物的挤压下相对所述机器人主体转动,带动所述触发件接近所述感应件,所述感应件检测的信号强度随所述触发件的接近程度增加而改变;
7、控制器,分别与所述行走组件和所述感应件电连接,用于根据所述信号强度,控制所述行走组件带动所述机器人主体执行脱困操作。
8、可选地,所述控制器判断所述信号强度满足第一类脱困触发条件时,控制所述行走组件带动所述机器人主体执行第一脱困操作;
9、所述控制器判断所述信号强度满足第二类脱困触发条件时,控制所述行走组件带动所述机器人主体执行第二脱困操作。
10、可选地,所述控制器检测到所述信号强度满足第一预设阈值范围时,所述控制器判断所述信号强度不满足所述第一类脱困触发条件;
11、所述控制器检测到所述信号强度满足第二预设阈值范围时,所述控制器判断所述信号强度满足所述第一类脱困触发条件;
12、所述控制器检测到所述信号强度满足第三预设阈值范围时,所述控制器判断所述信号强度满足第二类脱困触发条件,其中,所述第二预设阈值范围大于所述第一预设阈值范围,所述第三预设阈值范围大于所述第二预设阈值范围。
13、可选地,所述第一脱困操作为减速前进,或者,所述第一脱困操作为停止移动或后退。
14、可选地,所述第二脱困操作为停止移动或后退,或者,所述第二脱困操作为原地转动之后再后退。
15、可选地,当所述第一脱困操作为减速前进时,在所述机器人主体执行第一脱困操作过程中,若所述控制器检测到所述信号强度减少至不满足所述第一脱困触发条件,所述控制器控制所述行走组件结束所述第一脱困操作并以初始速度带动所述机器人主体继续前进。
16、可选地,所述第一脱困操作包括:所述控制器控制所述行走组件在第一预设时长内,带动所述机器人主体减速至第一速度进行前进。
17、可选地,所述第一脱困操作还包括:所述控制器检测到所述第一预设时长内的信号强度逐渐递增时,控制所述行走组件在第二预设时长内,带动所述机器人主体进一步减速至第二速度进行前进,所述第二速度小于所述第一速度。
18、可选地,所述顶壳组件包括:
19、顶壳,相对所述机器人主体倾斜设置,其中,所述顶壳可转动地安装于所述机器人主体上;
20、弹性组件,弹性连接在所述顶壳和所述机器人主体之间,用于将所述顶壳复位至预设位置。
21、可选地,所述信号强度与所述触发件与所述感应件之间的距离呈负相关关系。
22、可选地,所述触发件为磁铁,所述感应件为线性霍尔传感器。
23、在本发明实施例提供的自移动机器人中,行走组件安装于机器人主体上,顶壳组件可转动地安装于机器人主体上,传感组件包括感应件与触发件,感应件安装于机器人主体上,触发件安装于顶壳组件上,顶壳组件可在垂悬障碍物的挤压下相对机器人主体转动,带动触发件接近感应件,感应件检测的信号强度随触发件的接近程度增加而改变,控制器分别与行走组件和感应件电连接,用于根据信号强度,控制行走组件带动机器人主体执行脱困操作。一方面,由于本实施例提供的顶壳组件可在垂悬障碍物的挤压下相对机器人主体转动,带动触发件接近感应件,因此,采用此种结构的自移动机器人能够有效地检测垂悬障碍物的存在,为后续执行脱困操作提供硬件结构基础。另一方面,本实施例能够根据信号强度,控制行走组件带动机器人主体执行脱困操作,能够有效地在垂悬障碍物下进行脱困。
技术特征:
1.一种自移动机器人,其特征在于,包括:
2.根据权利要求1所述的自移动机器人,其特征在于,
3.根据权利要求2所述的自移动机器人,其特征在于,
4.根据权利要求2所述的自移动机器人,其特征在于,所述第一脱困操作为减速前进,或者,所述第一脱困操作为停止移动或后退。
5.根据权利要求2所述的自移动机器人,其特征在于,所述第二脱困操作为停止移动或后退,或者,所述第二脱困操作为原地转动之后再后退。
6.根据权利要求2所述的自移动机器人,其特征在于,当所述第一脱困操作为减速前进时,在所述机器人主体执行第一脱困操作过程中,若所述控制器检测到所述信号强度减少至不满足所述第一脱困触发条件,所述控制器控制所述行走组件结束所述第一脱困操作并以初始速度带动所述机器人主体继续前进。
7.根据权利要求2所述的自移动机器人,其特征在于,所述第一脱困操作包括:所述控制器控制所述行走组件在第一预设时长内,带动所述机器人主体减速至第一速度进行前进。
8.根据权利要求7所述的自移动机器人,其特征在于,所述第一脱困操作还包括:所述控制器检测到所述第一预设时长内的信号强度逐渐递增时,控制所述行走组件在第二预设时长内,带动所述机器人主体进一步减速至第二速度进行前进,所述第二速度小于所述第一速度。
9.根据权利要求1至8任一项所述的自移动机器人,其特征在于,所述顶壳组件包括:
10.根据权利要求1至8任一项所述的自移动机器人,其特征在于,所述信号强度与所述触发件与所述感应件之间的距离呈负相关关系。
11.根据权利要求1至8任一项所述的自移动机器人,其特征在于,所述触发件为磁铁,所述感应件为线性霍尔传感器。
技术总结
本发明涉及机器人技术领域,公开了一种自移动机器人。自移动机器人包括机器人主体、行走组件、顶壳组件、传感组件及控制器,传感组件包括感应件与触发件,顶壳组件可在垂悬障碍物的挤压下相对机器人主体转动,带动触发件接近感应件,感应件检测的信号强度随触发件的接近程度增加而改变,控制器根据信号强度,控制行走组件带动机器人主体执行脱困操作。由于本实施例提供的顶壳组件可在垂悬障碍物的挤压下相对机器人主体转动,带动触发件接近感应件,因此,本实施例能够有效地检测垂悬障碍物的存在,为后续脱困操作提供硬件结构基础。另外,本实施例根据信号强度,控制行走组件带动机器人主体执行脱困操作,能够有效地在垂悬障碍物下进行脱困。
技术研发人员:黄义庭
受保护的技术使用者:深圳银星智能集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!