清扫机器人及阴角清扫方法与流程
本申请涉及建筑机器人,具体而言,涉及一种清扫机器人及阴角清扫方法。
背景技术:
1、清洁机器人进行室内自动清扫作业时,房间阴角的清扫一直是行业痛点,这是因为具有清扫功能的主刷都处于设备的中间位置,无论从那个路径进行清扫主刷总是无法到达阴角位置,因此机器人完成自动清扫作业后阴角处总还是存在垃圾,这些无法覆盖的区域一般都是靠人工去清理。由于机器人自动清扫作业不能实现覆盖率100%,也就不能实现真正意义上的无人化,这样势必造成成本的增加,也拉低了机器人施工的经济效益。
技术实现思路
1、本申请的目的在于提供一种清扫机器人,其能够改善现有的清洁机器人不能清扫阴角位置的垃圾的问题。
2、本申请的另外一个目的在于提供一种阴角清扫方法,其采用了上述清扫机器人,其能够将阴角垃圾清除。
3、本申请的实施例是这样实现的:
4、本申请的实施例提供了一种清扫机器人,包括:
5、底盘;
6、主刷,安装于所述底盘中部;
7、两个边刷,分别安装于所述底盘前部的左右两侧,用于将垃圾扫到所述主刷的前进路径上以供所述主刷清扫;
8、后挡边,设置于所述主刷的后侧,用于防止所述主刷清扫时扬尘;以及
9、升降机构,安装于底盘,用于驱动所述后挡边升降,以使所述后挡边能够在升起位置和降下位置之间切换。
10、底盘向前移动时,可以通过边刷配合主刷将垃圾扫除,在底盘后退前,升降机构可以升起后挡边,使得底盘可以在后退时不带动垃圾移动,从而能够推到垃圾后方,再降下后挡边,并通过底盘的前进继续扫除垃圾,为实现阴角垃圾的扫除提供结构基础,整个清扫机器人自动化清扫作业的效果好。
11、另外,根据本申请的实施例提供的清扫机器人,还可以具有如下附加的技术特征:
12、在本申请的可选实施例中,所述升降机构包括升降驱动件、导向件和安装件,所述导向件固定于所述底盘,所述安装件可滑动地设置于所述导向件,所述升降驱动件的输出端与所述安装件连接,所述后挡边固定于所述安装件。
13、导向件可以保障安装件的运动方向稳定,从而通过升降驱动件将后挡边升降。
14、在本申请的可选实施例中,所述升降机构还包括压板,所述压板固定于所述安装件,所述后挡边被所述压板与所述安装件夹持固定。
15、压板可以将后挡边夹持在安装件上,保障后挡边稳定。
16、在本申请的可选实施例中,所述升降机构还包括支撑件,所述支撑件固定于所述底盘,所述升降驱动件连接于所述支撑件。
17、支撑件可以为升降驱动件提供连接基础,保障与底盘稳定连接。
18、在本申请的可选实施例中,所述升降机构还包括位置感应器,所述位置感应器用于检测所述后挡边处于降下位置或者处于升起位置。
19、通过位置感应器,可以方便确定后挡边的位置信息,以进一步确定是否升降。
20、本申请的实施例提供了一种阴角清扫方法,应用于上述任一项所述的清扫机器人,该方法包括以下步骤:
21、以所述清扫机器人的前后方向平行于阴角的第一墙边的姿态,通过所述清扫机器人的边刷将阴角垃圾向背离所述第一墙边的方向扫出第一预设距离;
22、控制所述清扫机器人的后挡边升起,然后控制所述清扫机器人转向90度;
23、控制所述清扫机器人沿所述阴角的第二墙边移动至所述阴角处;
24、控制所述后挡边降下,然后控制所述清扫机器人开启清扫模式并沿所述第二墙边前进,完成对所述阴角垃圾的清扫。
25、通过该方法,清扫机器人能够将阴角垃圾清除,提升自动化清洁作业的覆盖范围。
26、在本申请的可选实施例中,所述以所述清扫机器人的前后方向平行于阴角的第一墙边的姿态,通过所述清扫机器人的边刷将阴角垃圾向背离所述第一墙边的方向扫出第一预设距离,包括:
27、控制所述清扫机器人开启清扫模式并沿所述第一墙边向所述阴角前进,当所述清扫机器人前进至所述阴角处时,通过靠近所述阴角一侧的所述边刷将所述阴角垃圾扫到两个所述边刷之间的位置;
28、关闭所述清扫模式,控制所述清扫机器人沿所述第一墙边后退第二预设距离;
29、控制所述清扫机器人向背离所述第一墙边的方向横移第三预设距离;
30、重复上述步骤,直至所述阴角垃圾与所述阴角的距离达到所述第一预设距离。
31、通过重复多次,可以将阴角垃圾扫离阴角,并且达到可以被清除位置。
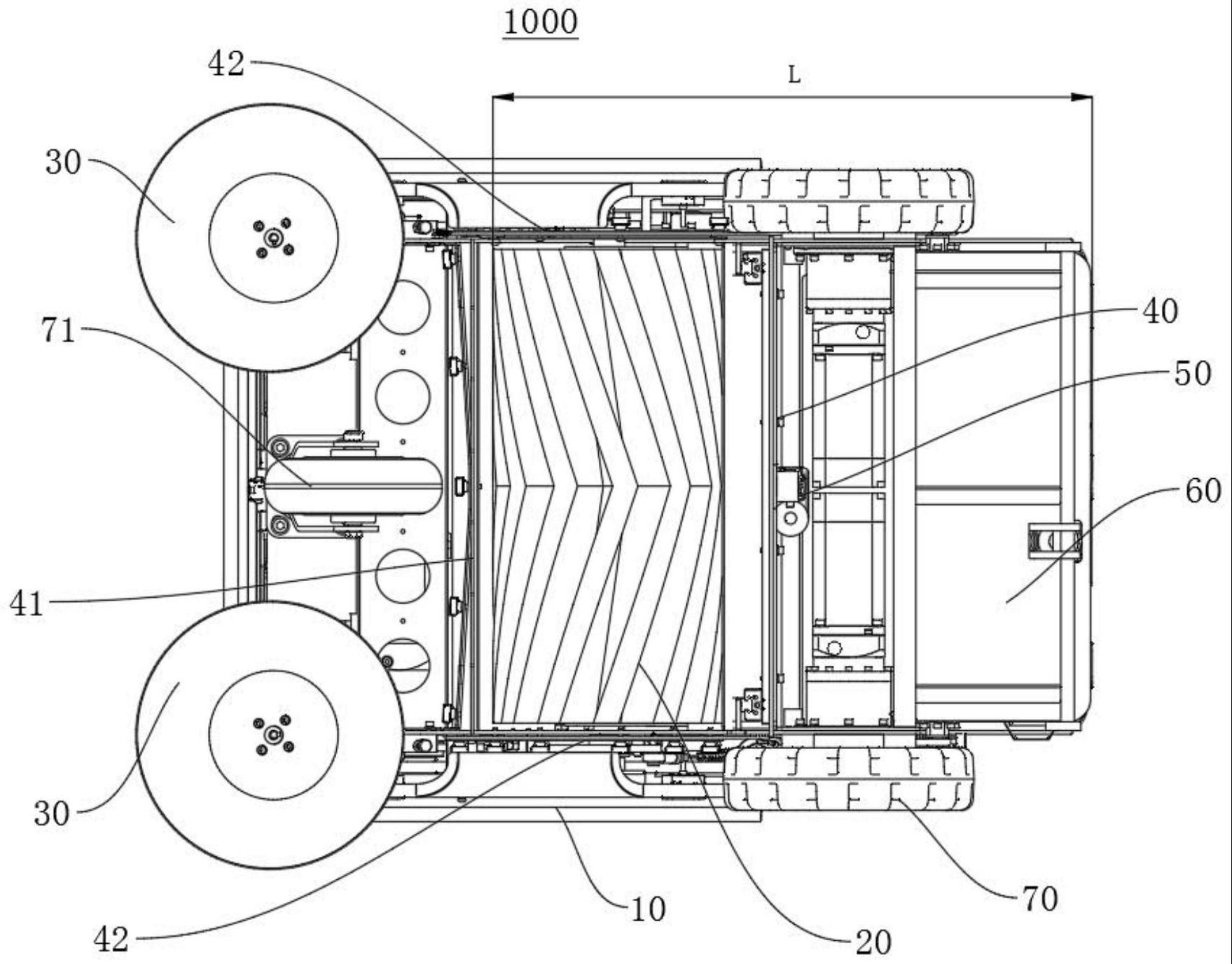
32、在本申请的可选实施例中,以所述底盘的后端为第一参考点,以所述主刷的前端为第二参考点,所述第一参考点与所述第二参考点之间的间距为l,所述第一预设距离为m,满足m≥l。
33、通过设计第一预设距离,能够保障主刷可以清除掉被扫出的阴角垃圾。
34、在本申请的可选实施例中,为n,两个所述边刷(30)的中心距为p,满足n≤p/2。
35、通过设计第三预设距离,可以保障每次都能够将阴角垃圾扫离第一墙边更远的距离。
36、在本申请的可选实施例中,开启所述清扫模式时,边刷下降,边刷开启,主刷下降、主刷开启;
37、关闭所述清扫模式时,边刷上升,边刷关闭,主刷上升、主刷关闭。
38、通过开闭清扫模式,可以在有需求时扫除垃圾,在不需要清扫时,避免边刷和主刷损坏。
技术特征:
1.一种清扫机器人,其特征在于,包括:
2.根据权利要求1所述的清扫机器人,其特征在于,所述升降机构包括升降驱动件、导向件和安装件,所述导向件固定于所述底盘,所述安装件可滑动地设置于所述导向件,所述升降驱动件的输出端与所述安装件连接,所述后挡边固定于所述安装件。
3.根据权利要求2所述的清扫机器人,其特征在于,所述升降机构还包括压板,所述压板固定于所述安装件,所述后挡边被所述压板与所述安装件夹持固定。
4.根据权利要求2所述的清扫机器人,其特征在于,所述升降机构还包括支撑件,所述支撑件固定于所述底盘,所述升降驱动件连接于所述支撑件。
5.根据权利要求1所述的清扫机器人,其特征在于,所述升降机构还包括位置感应器,所述位置感应器用于检测所述后挡边处于降下位置或者处于升起位置。
6.一种阴角清扫方法,应用于权利要求1-5任一项所述的清扫机器人,其特征在于,该方法包括以下步骤:
7.根据权利要求6所述的阴角清扫方法,其特征在于,所述以所述清扫机器人的前后方向平行于阴角的第一墙边的姿态,通过所述清扫机器人的边刷将阴角垃圾向背离所述第一墙边的方向扫出第一预设距离,包括:
8.根据权利要求6或7所述的阴角清扫方法,其特征在于,以所述底盘的后端为第一参考点,以所述主刷的前端为第二参考点,所述第一参考点与所述第二参考点之间的间距为l,所述第一预设距离为m,满足m≥l。
9.根据权利要求7所述的阴角清扫方法,其特征在于,所述第三预设距离为n,两个所述边刷的中心距为p,满足n≤p/2。
10.根据权利要求6所述的阴角清扫方法,其特征在于,开启所述清扫模式时,所述边刷下降,所述边刷开启,所述主刷下降,所述主刷开启;
技术总结
本申请涉及建筑机器人技术领域,具体而言,涉及一种清扫机器人及阴角清扫方法。清扫机器人,包括:底盘;主刷,安装于底盘中部;两个边刷,分别安装于底盘前部的左右两侧,用于将垃圾扫到主刷的前进路径上以供主刷清扫;后挡边,设置于主刷的后侧,用于防止主刷清扫时扬尘;以及升降机构,安装于底盘,用于驱动后挡边升降,以使后挡边能够在升起位置和降下位置之间切换。清扫机器人通过阴角清扫方法,结合升降机构对后挡边的升降控制,以及边刷与主刷的配合,在底盘的移动下,可以覆盖阴角这样的死角位置,完成垃圾清扫,基本实现自动清扫的百分百覆盖,提升了应用机器人施工的经济效益。
技术研发人员:葛敏,邹丹
受保护的技术使用者:广东博智林机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!