一种自动加湿降尘的智能清扫机器人
1.本实用新型涉及清扫机器人设备领域,具体是一种自动加湿降尘的智能清扫机器人。
背景技术:
2.目前,在家居清洁方面,智能清扫机器人已成为最受关注的家电产品之一。智能清扫机器人大多具有精准导航、视频识别、语音控制等功能,能够代替人工来进行全天候的清扫工作,但在实际使用过程中依旧存在一定的问题。
3.现有中国专利公开了一种自主加湿智能清扫机器人,授权公告号为cn106426219b,公开日期为2019-11-19,该专利技术不仅达到了对地面进行快速清扫的目的,而且通过两个喷头对上方的空气进行喷水加湿,从而保证家庭地面的洁净和空气的良好。但是其中的喷头是固定设置于机器人外部的,且两个喷头只能对机器人上方的空气进行一定程度的加湿,而不能对被机器人覆盖的地面区域进行直接加湿,当地面灰尘积聚较多时,清扫时将会产生较为明显的扬尘现象。针对这种情况,本领域技术人员提供了一种自动加湿降尘的智能清扫机器人。
技术实现要素:
4.本实用新型的目的在于提供一种自动加湿降尘的智能清扫机器人,以解决上述背景技术中提出的喷头加湿方向固定单一导致清扫效果不佳的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种自动加湿降尘的智能清扫机器人,包括壳体和储水筒,所述壳体顶部的一侧嵌设有控制面板,所述壳体的中心位置处贯穿开设有通槽,且通槽中设置有储水筒,所述储水筒顶部与底部的侧壁上皆等角度嵌设有若干个雾化喷头,用于雾化加湿,所述储水筒内部的底端固定有潜水泵,且潜水泵的输出端通过三通管接通有两个电磁阀,并且两个电磁阀分别通过若干个柔性导管与上下两组雾化喷头相互连通,用于自动控制上层加湿或下层加湿。
7.作为本实用新型再进一步的方案:所述储水筒由一个圆筒和上下两个圆盘组成,可拆解,且储水筒为透明亚克力材质,便于观察储水筒内部的液位及潜水泵的运行状况。
8.作为本实用新型再进一步的方案:所述储水筒的轴向长度大于壳体的厚度,确保上下两组雾化喷头能够交替伸出壳体,且储水筒上下两端的直径大于通槽的直径,避免储水筒从通槽中直接脱落。
9.作为本实用新型再进一步的方案:所述储水筒顶端的一侧接通有进水管,且进水管的底端安装有阀门,便于手动开闭。
10.作为本实用新型再进一步的方案:所述储水筒外侧的壳体内部对称设置有两个升降机构,且升降机构包括电缸,所述电缸的底端固定于壳体内部的底端,且电缸的输出端转动连接有横臂,所述横臂的另一端粘接有柔性橡胶块,且柔性橡胶块的另一侧贴附于储水
筒的外侧壁上,用于自动化控制储水筒竖直升降,从而分别实现空气加湿和地面加湿两种效果。
11.作为本实用新型再进一步的方案:所述电缸顶端的一侧安装有支撑座,且支撑座呈“丄”型结构,所述支撑座中部的两侧壁上皆转动连接有定位片,且定位片的顶端皆与横臂的中部转动连接,用于限定横臂的旋转轨迹,进而确保储水筒往复升降。
12.本实用新型的有益效果是:
13.1、通过潜水泵抽取储水筒中的水并向电磁阀处泵送,当储水筒顶部向上伸出,则对应侧的电磁阀自动打开,使得水经过柔性导管向位于上层的雾化喷头中供送,实现对周围空气的加湿功能,使得灰尘下降;反之,当储水筒底部向下伸出,则另一侧的电磁阀自动打开,实现对周围地面的加湿功能,避免灰尘扬起,如此交替,从而有效增强了该机器人的清扫效果;
附图说明
14.下面结合附图对本实用新型作进一步的说明。
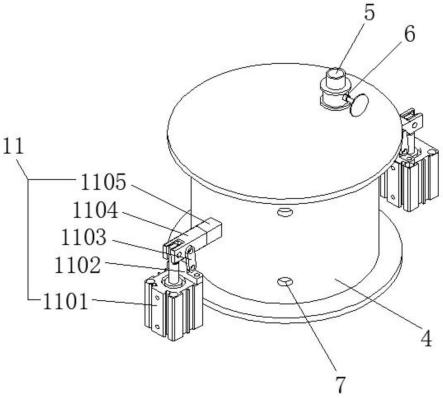
15.图1为一种自动加湿降尘的智能清扫机器人的立体示意图;
16.图2为图1中壳体和储水筒的正视剖面示意图;
17.图3为图1中储水筒的立体示意图。
18.图中:1、壳体;2、控制面板;3、通槽;4、储水筒;5、进水管;6、阀门;7、雾化喷头;8、潜水泵;9、电磁阀;10、柔性导管;11、升降机构;1101、电缸;1102、支撑座;1103、定位片;1104、横臂;1105、柔性橡胶块。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,请参阅图1~3,本实用新型实施例如下:
20.一种自动加湿降尘的智能清扫机器人,在图1和图2中:包括壳体1和储水筒4,壳体1顶部的一侧嵌设有控制面板2,壳体1的中心位置处贯穿开设有通槽3,且通槽3中设置有储水筒4,储水筒4顶部与底部的侧壁上皆等角度嵌设有四个雾化喷头7,用于雾化加湿,储水筒4内部的底端固定有潜水泵8,且潜水泵8的输出端通过三通管接通有两个电磁阀9,并且两个电磁阀9分别通过四个柔性导管10与上下两组雾化喷头7相互连通,用于自动控制上层加湿或下层加湿。
21.在图2和图3中:储水筒4由一个圆筒和上下两个圆盘组成,可拆解,且储水筒4为透明亚克力材质,便于观察储水筒4内部的液位及潜水泵8的运行状况;储水筒4的轴向长度大于壳体1的厚度,确保上下两组雾化喷头7能够交替伸出壳体1,且储水筒4上下两端的直径大于通槽3的直径,避免储水筒4 从通槽3中直接脱落;储水筒4顶端的一侧接通有进水管5,且进水管5的底端安装有阀门6,便于手动开闭。
22.在图1和图3中:储水筒4外侧的壳体1内部对称设置有两个升降机构11,且升降机构11包括电缸1101,电缸1101的底端固定于壳体1内部的底端,且电缸1101的输出端转动连接有横臂1104,横臂1104的另一端粘接有柔性橡胶块1105,且柔性橡胶块1105的另一侧贴附于储水筒4的外侧壁上,用于自动化控制储水筒4竖直升降,从而分别实现空气加湿和地
面加湿两种效果;电缸1101 顶端的一侧安装有支撑座1102,且支撑座1102呈“丄”型结构,支撑座1102 中部的两侧壁上皆转动连接有定位片1103,且定位片1103的顶端皆与横臂1104 的中部转动连接,用于限定横臂1104的旋转轨迹,进而确保储水筒4往复升降。
23.该控制面板2的型号可为dl203,该潜水泵8的型号可为gpd32-5s,该电磁阀9的型号可为4v210-08,该电缸1101的型号可为tjc-c1-300,且潜水泵8、电磁阀9以及电缸1101的输入端皆与控制面板2内部单片机的输出端电性连接。
24.本实用新型的工作原理是:首先在壳体1中内置蓄电池作为电源,并通过控制面板2设定清扫模式,启动该智能清扫机器人后,在控制面板2内部单片机的控制下,潜水泵8自动抽取储水筒4中的水并向电磁阀9处泵送,当储水筒4顶部向上伸出,则对应侧的电磁阀9自动打开,使得水经过对应的柔性导管10向位于上层的雾化喷头7中供送,实现对周围空气的加湿功能,使得灰尘下降;反之,当储水筒4底部向下伸出,则另一侧的电磁阀9自动打开,实现对周围地面的加湿功能,避免灰尘扬起,如此交替,从而有效增强了该机器人的清扫效果;
25.而在上述储水筒4的升降过程中,通过控制两个电缸1101同步伸长,使得横臂1104的另一端在定位片1103的转动限定下旋转下降,即可使得柔性橡胶块1105偏向挤压收缩并带动储水筒4整体下沉;反之,当电缸1101完全收缩,则横臂1104的另一端旋转上升,即可利用向另一侧压缩的柔性橡胶块1105带动储水筒4整体上升,从而实现了自动定量的换向加湿功能。
26.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1