智能炒菜系统的制作方法
1.本实用新型涉及智能烹饪技术领域,具体是指一种智能炒菜系统。
背景技术:
2.餐饮业的成本尤其是厨师的成本占据了总成本中相当大的比重,从而在一定程度上制约了餐饮业品质和服务的进一步提升和壮大,同时由于厨师的体力劳动强度大,长时间工作后容易患上肩周炎、腰肌劳损等厨师职业病。为此,一款能够缩减人力,降低人工成本,提升出品速度,改善厨师工作环境,节约能源,味道一致的炒菜机可以有效的改善上述问题。
3.现有炒菜机大多都是一台炒菜机独立运行,但在饭店等环境中往往需要多台炒菜机,多台独立运行的炒菜机导致操作人员需分别到炒菜机布置位置对其进行操作,导致控制不便,整体工作效率较低。
技术实现要素:
4.基于以上技术问题,本实用新型提供了一种智能炒菜系统,解决了现有多台炒菜机共同使用时,由于控制不便导致工作效率低下的问题。
5.为解决以上技术问题,本实用新型采用的技术方案如下:
6.一种智能炒菜系统,包括主控制台、至少一台炒菜机和至少两个橱柜;主控制台中设有控制终端;炒菜机包括主机、加热模块、搅拌模块、送料模块、油水模块和控制系统;加热模块设置在主机之上用于对锅具加热,搅拌模块通过翻转机构安装在加热模块一侧用于烹饪搅拌,送料模块安装在加热模块一侧用于将烹饪用料送入锅具内,油水模块用于将油水送入锅具内;控制系统设置在主机之内,控制系统包括物联网模块和控制模块,控制模块与物联网模块信号连接,物联网模块与控制终端信号连接;橱柜上端面设有工作台,工作台用于放置主控制台或炒菜机。
7.进一步的,主控制台上还包括触控显示器,触控显示器与控制终端信号连接。
8.进一步的,还包括切配平台,切配平台用于烹饪用料的切配。
9.进一步的,切配平台放置在橱柜的工作台之上。
10.进一步的,橱柜设有至少一个置物柜。
11.进一步的,置物柜内设有换气扇和紫外线消毒装置。
12.进一步的,搅拌模块包括搅拌电机、旋转座、竖向搅拌爪和斜向搅拌爪;搅拌电机固定安装在翻转机构端头,旋转座与搅拌电机的输出轴端头固定连接,竖向搅拌爪竖直安装在旋转座上,斜向搅拌爪倾斜安装在旋转座上。
13.进一步的,油水模块包括多个油水单元,油水单元包括喷嘴和加液泵;喷嘴安装在加热模块一侧用于将油水送入锅具内,加液泵进口通过管道与液料桶连通,加液泵出口通过管道与喷嘴连通。
14.进一步的,送料模块包括送料驱动模块、置盒架、投料模块和至少一个料盒;送料
驱动模块安装在主机内部;置盒架可在送料驱动模块的带动下水平活动;料盒放置在置盒架之上;投料模块包括安装在加热模块和置盒架之间的投料机械臂,投料机械臂上端驱动设置有可转动的带电磁铁的投料臂,投料臂可吸附固定安装在料盒侧面的铁磁性金属片将料盒抓取翻转从而将食材投入锅具内。
15.进一步的,送料驱动模块包括送料驱动电机和齿轮;送料驱动电机安装在主机之内;齿轮固定安装在送料驱动电机的输出轴上,齿轮上端伸出主机与置盒架下端面所设齿条结构啮合从而带动置盒架移动。
16.与现有技术相比,本实用新型的有益效果是:
17.本实用新型通过设置主控制台,通过主控制台与各台炒菜机的物联网模块连接,即可通过主控制台对多台炒菜机进行控制,不受炒菜机的物理布局影响,操作人员只需要在主控制台操作便可完成对炒菜机的控制,增强了对炒菜机的控制便利性,提高了工作效率。
附图说明
18.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。其中:
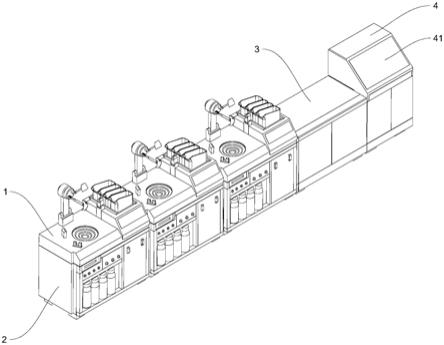
19.图1为智能炒菜机系统结构示意图图一。
20.图2为炒菜机结构示意图。
21.图3为橱柜结构示意图。
22.图4为搅拌模块结构示意图。
23.图5为送料模块结构示意图图一。
24.图6为送料模块结构示意图图二。
25.图7为送料模块结构示意图图三(去除机体外壳)。
26.图8为智能炒菜机系统结构示意图图二。
27.其中,1炒菜机,11搅拌模块,111搅拌电机,112旋转座,113角度调节结构,114斜向搅拌爪,115竖向搅拌爪,12送料模块,121料盒,122磁性金属片,123置盒架,124投料臂,125投料机械臂,126送料驱动电机,127齿轮,128齿条,13显示模块,14主机,15加热模块,16喷嘴,17翻转机构,18液料桶,2橱柜,21工作台,22置物柜,3切配平台,4主控制台,41触控显示器。
具体实施方式
28.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例的附图,对本技术实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于所描述的本技术的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
29.除非另外定义,本技术使用的技术术语或者科学术语应当为本技术所属领域内具有一般技能的人士所理解的通常意义。本技术中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件
及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
30.图1~8是本技术一些实施例所示的智能炒菜系统的结构示意图,以下将结合图1~8对本技术所涉及的智能炒菜系统进行介绍。需要注意的是,图1~8仅作为示例,并不对智能炒菜系统的具体形状和结构形成限定。
31.参阅图1~3、图8,在一些实施例中,一种智能炒菜系统,包括主控制台4、至少一台炒菜机1和至少两个橱柜2;主控制台4中设有控制终端;炒菜机1包括主机14、加热模块15、搅拌模块11、送料模块12、油水模块和控制系统;加热模块15设置在主机14之上用于对锅具加热,搅拌模块11通过翻转机构17安装在加热模块15一侧用于烹饪搅拌,送料模块12安装在加热模块15一侧用于将烹饪用料送入锅具内,油水模块用于将油水送入锅具内;控制系统设置在主机14之内,控制系统包括物联网模块和控制模块,控制模块与物联网模块信号连接,物联网模块与控制终端信号连接;橱柜2上端面设有工作台21,工作台21用于放置主控制台4或炒菜机1。
32.在本实施例中,本技术的智能炒菜机1系统可以通过主控制台4向至少一台炒菜机1发送控制指令,炒菜机1的物联网模块接收主控制台4的控制指令,主控制台4亦可向炒菜机1传输菜谱数据,炒菜机1的控制模块再根据接收到的菜谱数据进行烹饪操作。炒菜机1的基本烹饪过程包括:首先加热模块15启动对锅具进行预热,待锅具预热后,通过油水模块注入食用油。然后通过送料模块12按序将烹饪用料送入锅具内,搅拌模块11对锅具内烹饪用料进行翻炒搅拌,直至食物烹饪完毕成菜。在烹饪期间,根据需要通过油水模块加入液态调料,如酱油、醋等,通过送料模块12加入固体调料,如盐、味精、糖等。
33.此外通过增设橱柜2结构,本箱柜式智能炒菜机1方便对炒菜机1其配件结构进行收纳放置,使其整体布局整洁,增强了炒菜机1的使用便利性。
34.优选的,对于物联网模块与控制终端的信号连接,可以采用有线信号连接,也可以采用无线信号连接,无线信号连接的方式可以选用蓝牙、5g信号等。
35.其中,通过物联网模块还可把基于物联网的智能炒菜机1数据,包含运行数据、故障数据、运营数据等发送至云端数据库分析,数据类型分为三类,数据均在本地处理,具体有:
36.1、机器人运行数据-状态数据,本地存储后通过物联网模块上报到云端服务器;位置数据,实时检测与云端后台维护的位置一致性,不一致本地询问更新基于物联网的智能炒菜机1位置信息;
37.2、机器人运营数据-炒菜数据,炒菜完成后直接通过物联网模块上报到云端,若基于物联网的智能炒菜机1状态为离线。则会先本地存储,等待上线后,基于物联网的智能炒菜机1系统按照炒菜记录的先后顺序上报到云端;
38.3、机器人菜谱数据,证书经过加密存储,通过门店-菜谱-基于物联网的智能炒菜机1三者的绑定关系获取本基于物联网的智能炒菜机1可执行的菜谱信息。
39.物联网模块反向控制,其特征是:当基于物联网的智能炒菜机1发生故障并通过物联网模块上报到云端告警成功后,云端返回处理办法到所在终端的基于物联网的智能炒菜
机1系统,给出提示信息,采用自动或手动的处理方式解决故障问题。
40.优选的,加热模块15为电磁炉,电磁炉为凹形电磁炉。
41.其中,采用凹型电磁炉面板,在受热面积不变、功率不变的前提下,集中热量在锅底部,使得爆炒菜的热量更大,成菜的速度更快,同功率下节省了能量。
42.优选的,加热模块15的加热面板上设有弹性测温模块,弹性测温模块与控制模块信号连接。
43.其中,锅具会下压弹性测温模块,使得弹性测温模块与锅具底部贴合,使其与锅具充分接触,从而能够准确获取锅具温度并反馈给基于物联网的智能炒菜机1的控制模块使其能够准确掌握烹饪火候,保证菜品质量。
44.优选的,主机14由不锈钢材料制成,主机14内通过不锈钢隔板将加热模块15与控制系统隔开。
45.其中,利用不锈钢隔板从结构上把加热模块15与控制系统分为独立的两个系统,从物理结构上进行区分,用以防止油水的渗漏或者电磁干扰造成控制系统的故障,提高控制系统的稳定性和可靠性。
46.优选的,主机14上设有显示模块13和按键模块,显示模块13和按键模块均与控制模块信号连接。
47.其中,显示模块13可以用于显示基于物联网的智能炒菜机1的运行参数、运行状态等数据信息,方便操作人员直观了解当前炒菜机1运行状态。
48.其中,按键模块设有多个功能按键,方便操作人员通过功能按键对单台炒菜机1进行手动控制。
49.参阅图1,在一些实施例中,主控制台4上还包括触控显示器41,触控显示器41与控制终端信号连接。
50.其中,触控显示器41可以用于显示各台炒菜机1的运行参数、运行状态等数据信息,方便操作人员直观了解当前各台炒菜机1运行状态,还可以方便操作人员通过操作触控显示器41向各台炒菜机1下发控制指令控制各台炒菜机1运行,以方便操作人员进行控制操作。
51.参阅图1,在一些实施例中,还包括切配平台3,切配平台3用于烹饪用料的切配。
52.其中,切配平台3方便操作人员进行烹饪用料的切配作业。
53.优选的,切配平台3放置在橱柜2的工作台21之上。
54.其中,切配平台3通过橱柜2安置,使整个智能炒菜机1系统其炒菜机1、主控制台4和切配平台3布局风格统一,结构整洁美观。
55.参阅图3,在一些实施例中,橱柜2设有至少一个置物柜22。
56.其中,置物柜22中可存放料盒121、托盘、搅拌爪、投料臂124等炒菜机1配件,还可以存放一些烹饪用料或其他烹饪器具,通过收纳提高了厨房的整洁性。
57.在一些实施例中,置物柜22内设有换气扇和紫外线消毒装置。
58.其中,换气扇用于对置物柜22内进行换气抽湿,避免在厨房这种潮湿环境下,存放在置物柜22内的器具生霉。
59.其中,紫外线消毒装置用于对置物柜22内进行消毒杀菌,以保证置物柜22内的烹饪用具或原料干净清洁。
60.具体的,紫外线消毒装置为紫外线消毒灯。
61.参阅图4,在一些实施例中,搅拌模块11包括搅拌电机111、旋转座112、竖向搅拌爪115和斜向搅拌爪114;搅拌电机111固定安装在翻转机构17端头,旋转座112与搅拌电机111的输出轴端头固定连接,竖向搅拌爪115竖直安装在旋转座112上,斜向搅拌爪114倾斜安装在旋转座112上。
62.其中,搅拌电机111其通过输出轴带动旋转座112转动,旋转座112带动竖向搅拌轴和斜向搅拌轴同步转动,利用竖向搅拌爪115与斜向搅拌爪114配合用于烹饪用料翻炒,改变了传统的平行搅拌的方式。竖向搅拌爪115用于锅底搅拌,斜向搅拌爪114用于剐动锅边,把锅边的食材重新送入锅底。
63.优选的,斜向搅拌爪114与旋转座112通过角度调节结构113固定连接。
64.其中,通过斜向搅拌爪114与旋转座112的可调节安装,可以根据锅具结构的不同,调节角度调节结构113使斜向搅拌爪114的倾斜角度改变,以提高其使用范围。
65.优选的,竖向搅拌爪115和斜向搅拌爪114均包括骨架和食物接触部,骨架采用不锈钢或塑料制成,食物接触部采用食用级塑料制成。
66.在一些实施例中,油水模块包括多个油水单元,油水单元包括喷嘴16和加液泵;喷嘴16安装在加热模块15一侧用于将油水送入锅具内,加液泵进口通过管道与液料桶18连通,加液泵出口通过管道与喷嘴16连通。
67.其中,油水单元通过加液泵抽取液料桶18内原料注入锅具内,加液泵由控制模块控制器启停和运行时间,以此便可控制液料的注入量,以满足根据烹饪需要添加液料和其用量。
68.独立的油水单元也可避免液料之间串味。
69.具体的,多个液料桶18内分别装有不同的烹饪液料,例如食用油、水、醋、酱油等以满足烹饪需要。
70.优选的,对于加液泵,可以设置在主机14之内。
71.优选的,对于液料桶18,可以将其置于炒菜机1对应的橱柜2的置物柜22内。
72.其中,液料桶18收纳于置物柜22内,既方便对其进行收纳更换,又避免液料桶18随意放置对周围环境的影响,使周围环境整洁,便于操作人员活动。
73.参阅图5~6,在一些实施例中,送料模块12包括送料驱动模块、置盒架123、投料模块和至少一个料盒121;送料驱动模块安装在主机14内部;置盒架123可在送料驱动模块的带动下水平活动;料盒121放置在置盒架123之上;投料模块包括安装在加热模块15和置盒架123之间的投料机械臂125,投料机械臂125上端驱动设置有可转动的带电磁铁的投料臂124,投料臂124可吸附固定安装在料盒121侧面的铁磁性金属片122将料盒121抓取翻转从而将食材投入锅具内。
74.其中,送料模块12在基于物联网的智能炒菜机1进行烹饪时,其置盒架123可在送料驱动模块的带动下将需要的料盒121移动到投料臂124对应位置。随后,投料臂124上的电磁铁启动吸附料盒121上的铁磁性金属片122从而将料盒121抓取到投料臂124上,之后投料臂124转动带动料盒121翻转从而将料盒121内所放食材投入锅内。此投料机构结构简单,运行过程简单、快捷,能够十分方便地完成食材的投放操作。
75.参阅图7,优选的,送料驱动模块包括送料驱动电机126和齿轮127;送料驱动电机
126安装在主机14之内;齿轮127固定安装在送料驱动电机126的输出轴上,齿轮127上端伸出主机14与置盒架123下端面所设齿条128结构啮合从而带动置盒架123移动。
76.如上即为本实用新型的实施例。上述实施例以及实施例中的具体参数仅是为了清楚表述实用新型的验证过程,并非用以限制本实用新型的专利保护范围,本实用新型的专利保护范围仍然以其权利要求书为准,凡是运用本实用新型的说明书及附图内容所作的等同结构变化,同理均应包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1