一种清洁装置的制作方法
1.本实用新型涉及清洁工具技术领域,尤其涉及一种清洁装置。
背景技术:
2.随着城市发展越来越快,玻璃幕墙的应用在不断增加,不管是住宅还是办公楼,在玻璃的使用上越来越多,为了提高建筑物的整体整洁美观性,对玻璃的清洁是非常必要的。
3.然而,对于窗户玻璃的清洁并不是一件容易的事,尤其是对于一些高层建筑,目前很多情况下,主要采用的还是人工清洁的方式,其存在非常大的危险性,而且人工成本高。目前,市场上已经出现了一些玻璃清洁设备,如擦窗机器人,其主要通过磁力或者真空吸附力牢固吸附在玻璃的表面,通过控制其行进路径对玻璃进行清洁。
4.玻璃清洁机器人的出现节约了清洁时间,也使得家务劳动变得轻松;特别是针对高楼层的玻璃和阳台外部的玻璃,其消除了人工清洗过程中的安全隐患。但是,现有的玻璃清洁设备的行走方式单一,对于角落的清洁不到位。
技术实现要素:
5.本实用新型的目的在于,提供一种清洁装置,其行走方式灵活多样,清洁范围及效率高。
6.本实用新型通过如下技术方案实现:
7.一方面,本实用新型提供一种清洁装置,其包括:
8.壳体,所述壳体包括固定连接的上壳体和下壳体,所述上壳体和所述下壳体之间限定出安装空间;
9.三个清洁模组,所述三个清洁模组可转动的均匀安装在所述下壳体上,所述清洁模组包括吸盘,所述吸盘具有吸附空间,所述吸盘可相对于所述壳体转动;
10.三个泵模组,所述三个泵模组分别与所述三个清洁模组的吸附空间连通以分别抽取所述吸附空间内的空气,使所述吸附空间内分别形成负压;
11.至少一个驱动模组,所述驱动模组与所述清洁模组连接,用于驱动所述吸盘相对于所述壳体转动;以及
12.控制模组,所述控制模组与所述泵模组及所述驱动模组连接以控制所述泵模组及所述驱动模组。
13.在本实用新型的一些实施例中,所述吸盘包括吸盘主体以及套设在所述吸盘主体外侧的套架,所述吸盘主体上设有连接轴,所述连接轴可转动的设置在所述下壳体上。
14.在本实用新型的一些实施例中,所述套架上设有多个凹槽,所述吸盘主体上设有多个台阶,所述台阶可以卡合在所述凹槽内,以将所述套架固定安装在所述吸盘主体的外侧。
15.在本实用新型的一些实施例中,所述下壳体上设置有通孔,所述连接轴穿过所述通孔,所述连接轴上套设有第一套轴,所述连接轴通过所述第一套轴可转动的安装在所述
通孔内。
16.在本实用新型的一些实施例中,所述驱动模组包括固定安装在所述壳体上的驱动电机以及减速机构,所述减速机构的输入端与所述驱动电机的输出轴连接,所述减速机构的输出端与所述连接轴连接。
17.在本实用新型的一些实施例中,所述减速机构包括减速齿轮组,所述减速齿轮组的输出齿轮与所述连接轴固定连接。
18.在本实用新型的一些实施例中,所述输出齿轮上设有第二套轴,所述下壳体上设置有凸台,所述第二套轴套设在所述凸台上。
19.在本实用新型的一些实施例中,所述连接轴的端部设置有多个凹部,所述输出齿轮上设有多个凸部,所述输出齿轮与所述连接轴通过所述多个凹部和所述多个凸部卡合在一起。
20.在本实用新型的一些实施例中,所述输出齿轮与所述连接轴通过螺丝固定连接。
21.在本实用新型的一些实施例中,所述泵模组包括与所述吸附空间连通的真空泵,以抽取所述吸附空间内的空气。
22.根据本实用新型提供的清洁装置,其具有三个清洁模组以及三个泵模组,三个清洁模组可转动的安装在壳体上,三个清洁模块可以通过各自连接的泵模组分别单独控制其吸附空间内的负压,进而在三个清洁模块之间形成负压差,进而,本实用新型提供的清洁装置的行走方式可以多种多样,清洁范围及效率高。
23.本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明
24.图1为本实用新型的一些实施例中的清洁装置的立体结构示意图;
25.图2为本实用新型的一些实施例中的清洁装置的分解结构示意图;
26.图3为图1中a-a的剖面示意图;
27.图4为本实用新型的一些实施例中的清洁装置的吸盘的立体结构示意图;
28.图5为本实用新型的一些实施例中的清洁装置的去除上壳体后的立体结构示意图;
29.图6为本实用新型的一些实施例中的清洁装置去除中壳体后的立体结构示意图;
30.图7为本实用新型的一些实施例中的清洁装置的下壳体的结构示意图;以及
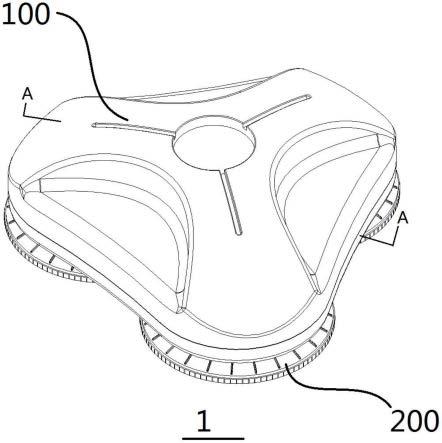
31.图8为本实用新型的一些实施例中的清洁装置的驱动模组的结构示意图。
具体实施方式
32.下面将结合附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.本技术实施例中的术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征
可以明示或者隐含地包括至少一个该特征。还需要说明的是,本技术中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。此外,“上”、“下”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或器件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。再者,术语“包括”和“设置有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
34.除以上所述外,仍需要强调的是,在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
35.如图1-8所示,本实用新型提供了一种清洁装置1,其包括壳体100,三个清洁模组200,三个泵模组300,至少一个驱动模组400,以及控制模组(图中未示出),控制模组与泵模组300及驱动模组400连接以控制泵模组300及驱动模组400。
36.其中,壳体100包括固定连接的上壳体102和下壳体104,上壳体102和下壳体104之间限定出安装空间,可以理解的是,安装空间用于安装或容置清洁装置1的内部各类元件,例如,用于安装或容置清洁模组200、泵模组300、驱动模组400以及控制模组。同样可以理解的是,本实用新型所说的“固定连接”是指清洁装置1在安装完成后,上壳体102和下壳体104是固定在一起的,上壳体102和下壳体104可以通过工具进行拆装。当然,上壳体102和下壳体104可以通过各种方式固定连接在一起,例如上壳体102和下壳体104可以通过卡扣机构卡合在一起,也可以通过螺丝、焊接或者热熔接等各种方式固定连接在一起。
37.参照图1-3所示,三个清洁模组200可转动的均匀安装在下壳体104上,清洁模组200包括吸盘202,吸盘202具有吸附空间204,吸盘202可相对于壳体100转动。三个泵模组300分别与三个清洁模组的吸附空间204连通以分别抽取吸附空间204内的空气,使吸附空间204内分别形成负压,进而,在负压的作用下,吸盘202可以牢固的吸附在待清洁的物体表面,从而实现将清洁装置1吸附在待清洁的物体表面。
38.即,本实用新型提供的清洁装置1具有三个独立的清洁模组200,每个清洁模组都具有吸盘202,吸盘202通过吸附空间204的负压可以吸附在待清洁的物体表面。
39.可以理解的是,本实用新型对于吸盘的形状没有特殊限制,其可以根据需要设置为各做形状。如图2所示,本实用新型的一些实施例中,吸盘202为圆形。
40.进一步的,在本实用新型的一些实施例中,参照图3-4所示,吸盘202包括吸盘主体2021以及套设在吸盘主体2021外侧的套架2022,吸盘主体2021上设有连接轴2023,连接轴2023可转动的设置在下壳体104上。可以理解的时,在进行清洁时,在吸盘202上需安装有清洁材质,例如海绵、抹布、或清洁纸等,进而吸盘202在待清洁表面移动时,其可以对待清洁表面进行清洁。清洁材质可以安装(例如,套设)在套架2022上,进而可以覆盖吸盘202的下表面。
41.套架2022可以通过各种方式与吸盘主体2021固定连接,在本实用新型的一些实施
例中,参照图3-4所示,在套架2022上设有多个凹槽2024,吸盘主体2021上设有多个台阶2025,台阶2025可以卡合在凹槽2024内,以将套架2022固定安装在吸盘主体2021的外侧。即,套架2022通过卡接的方式和吸盘主体2021连接,进而可以方便的安装及拆卸套架2022,方便清洁材质的更换清洗。
42.在本实用新型提供的清洁装置1中,驱动模组400与清洁模组200连接,用于驱动吸盘202相对于壳体100转动。由于三个泵模组300可以分别抽取三个清洁模组200的吸附空间204内的空气,使三个吸附空间204内分别形成负压,可以分别单独控制三个吸附空间204内的负压大小,使得三个吸附空间204内的负压不同,当吸附空间204内的负压的绝对值越大时,对应的吸盘202的吸附力越大,进而本实用新型提供的清洁装置1可以有多种行走方式。
43.例如,通过三个泵模组300分别独立抽取三个清洁模组200中的一个吸盘202(以下称为第一吸盘)的吸附空间204内的空气,使之产生负压,另外两个清洁模组200的吸盘202(以下称为第二吸盘和第三吸盘)的吸附空间204内保持正常大气压,此时,清洁装置1通过第一吸盘吸附在待清洁物体的表面。通过驱动模组400驱动第一吸盘相对于壳体100转动,此时,由于第一吸盘牢固的吸附在待清洁物体的表面,因此,壳体100将以该第一吸盘为圆心发生转动,即清洁装置1整体发生旋转,实现了第二吸盘和第三吸盘在待清洁物体的表面上移动。
44.进一步的,在控制第一吸盘牢固吸附在待清洁物体的表面的同时,可以控制第二吸盘的吸附空间内产生负压,并使其负压小于第一吸盘的吸附空间内的负压,此时,壳体100仍然以该第一吸盘为圆心发生转动,即清洁装置1整体发生旋转,并在旋转的同时,第二吸盘也提供一定的压力,进而在行走的同时提高清洁效果。
45.再进一步的,在控制第二吸盘的吸附空间内产生负压,并使其负压小于第一吸盘的吸附空间内的负压的同时,也可以控制第二吸盘相对于壳体100转动,进而,壳体100以第一吸盘为圆心发生转动,即清洁装置1整体发生旋转的同时,第二吸盘可以提供一定的行走动力或行走阻力(基于第二吸盘的旋转方向的不同,提供的力的方向不同),进而可以加快或减缓行走的速度。
46.再进一步的,在控制第二吸盘的吸附空间内产生负压,并使其负压小于第一吸盘的吸附空间内的负压,并控制第二吸盘相对于壳体100转动的同时,也可以控制第三吸盘的吸附空间内产生负压,并使其负压小于第一吸盘的吸附空间内的负压,并控制第三吸盘相对于壳体100转动。进而,壳体100仍然以第一吸盘为圆心发生转动,即清洁装置1整体发生旋转的同时,第二吸盘和第三吸盘都可以提供一定的行走动力或行走阻力(基于第二吸盘和第三吸盘的旋转方向的不同,提供的力的方向不同),进而可以加快或减缓行走的速度。
47.可以理解的是,通过控制三个吸盘的吸附空间内的负压大小,可以实现壳体100仍然以其中一个吸盘为圆心发生转动,另外两个吸盘可以不提供吸附力,也可以提供吸附力,同时也可以提供行走的动力或阻力,在壳体100转动一定角度后,调整三个吸盘的吸附空间内的负压大小,壳体100以另外一个吸盘为圆心进行转动,这样反复控制壳体100以某一个吸盘为圆心进行转动,可以实现清洁装置在待清洁物体表面上行走。
48.由于本实用新型提供的清洁装置1具有三个清洁模组200(例如,第一清洁模组、第二清洁模组,以及第三清洁模组),因此,其可以分别以三个清洁模组200为圆心进行旋转,并实现多种行走方式,行走路线可以多样化,同时,在行走的过程中,另外两个活动的清洁
模组200可以提供一定的吸附力,进而在运动的过程中可以在清洁材质和待清洁物体表面之间产生一定的摩擦力,以提高清洁效果。
49.本实用新型提供的清洁装置1的具体行走控制方法可以包括以下步骤:
50.s1,控制第一吸盘的第一吸附空间内形成负压;
51.s2,控制第二吸盘的第二吸附空间和第三吸盘的第三吸附空间内的负压小于第一吸附空间内的负压,使第一吸盘201吸附固定,以将清洁装置1牢固吸附在待清物体的表面;可以理解的是,第二吸盘的第二吸附空间和第三吸盘的第三吸附空间内的负压小于第一吸附空间内的负压可以是第二吸附空间和/或第三吸附空间内无负压,也可以是,第二;吸附空间和/或第三吸附空间内存在负压,但其负压大小小于第一吸附空间内的负压大小;以及
52.s3,控制第一吸盘沿第一旋转方向转动,以使清洁装置以第一吸盘为中心沿第二旋转方向转动,第一旋转方向和第二旋转方向相反;即,由于第一吸盘牢固吸附在待清洁物体的表面,在驱动装置控制第一吸盘相对于壳体旋转时,壳体将以第一吸盘为轴心发生旋转,进而实现清洁装置以第一吸盘为中心沿第二旋转方向转动。
53.当然,进一步的,为降低清洁装置1的行走难度,在本实用新型的一些实施例中,本实用新型提供的清洁装置1的具体行走控制方法还包括以下步骤:
54.s4,在控制第一吸盘沿第一旋转方向转动的同时,控制第二吸盘和/或第三吸盘沿第二旋转方向转动。由于第二吸盘、第三吸盘为移动吸盘,当第二吸盘和/或第三吸盘沿第二旋转方向转动,其转动方向与清洁装置的旋转方向相同,进而,第二吸盘和/或第三吸盘的转动可以为清洁装置的旋转提供进一步的动力(在第二吸盘和/或第三吸盘的吸附空间具有一定的负压时),以加快清洁装置的旋转速度,进而可以提高清洁装置1的行走效率。
55.进一步的,为减缓清洁装置1的行走速度,在本实用新型的一些实施例中,本实用新型提供的清洁装置1的具体行走控制方法还包括以下步骤:
56.s5,在控制第一吸盘沿第一旋转方向转动的同时,控制第二吸盘和/或第三吸盘沿第一旋转方向转动。由于第二吸盘、第三吸盘为移动吸盘,当第二吸盘和/或第三吸盘沿第一旋转方向转动,其转动方向与清洁装置的旋转方向想方,进而,第二吸盘和/或第三吸盘的转动可以为清洁装置的旋转提供反向的作用力(在第二吸盘和/或第三吸盘的吸附空间具有一定的负压时),以减缓清洁装置的旋转速度,进而可以减缓清洁装置1的行走速度。
57.从上描述可以看出,本实用新型提供的清洁装置,可以通过分别控制三个清洁模组的吸附力大小以及旋转方向,可以实现多种多样的行走路线,同时,可以提高或减缓清洁装置的行走速度,进一步提升清洁装置的控制多样性,满足不同场景的需求。
58.进一步的,为提高本实用新型提供的清洁装置1的紧凑度,提高内部安装的整洁度,在清洁装置1内还设置有中壳体103,中壳体103设置在上壳体102和下壳体104之间,其中,泵模组300固定安装在中壳体103上,驱动模组400固定安装在中壳体103和下壳体102之间,控制模组可以安装在上壳体102和中壳体103之间。
59.可以理解的是,清洁模组200可以通过多种方式安装在下壳体上,只要其吸盘202可以相对于壳体发生转动即可。在本实用新型的一些实施例中,参照图7所示,在下壳体104上设置有通孔1041,吸盘主体2021的连接轴2023穿过通孔1041,连接轴2023上套设有第一套轴2026,连接轴2023通过第一套轴2026可转动的安装在通孔1041内。可以理解的是,结构类似于轴承,套轴可以实现相互转动的效果,吸盘主体2021的连接轴2023与第一套轴2026
固定连接后,将第一套轴2026固定设置在通孔1041内,进而可以实现将清洁模组200可转动的安装在下壳体104上。
60.在本实用新型提供的清洁装置1中,驱动模组400用于分别驱动各个清洁模组与壳体相对转动,其可以采用为各种驱动结构,本实用新型对此没有特殊限制。
61.在本实用新型的一些实施例中,参照图6所示,驱动模组400包括固定安装在壳体100上的驱动电机4001以及减速机构4002,减速机构4002的输入端与驱动电机4001的输出轴连接,减速机构4002的输出端与连接轴2023连接。
62.可以理解的是,减速机构4002主要用于降低驱动电机4001输出的转速,以减缓驱动电机的输出,其可以采用各种常用的减速结构。在本实用新型的一些实施例中,参照图8所述,减速机构4002包括减速齿轮组,减速齿轮组的输出齿轮4003与连接轴2023固定连接。
63.减速齿轮组可以通过各种结构可转动的安装在壳体100上,本实用新型对此没有特殊限制。进一步的,在本实用新型的一些实施例中,参照图8所示,在输出齿轮4003上设有第二套轴4004,下壳体104上设置有凸台1042,第二套轴4004套设在凸台1042上。
64.为提高清洁装置的结构紧凑度,减少整体体积,在本实用新型的一些实施例中,凸台1042设置在通孔1041外侧,即,在通孔1041的外周设置有圆环形的凸台1042,第二套轴4004套设在凸台1042上,进而将输出齿轮4003可转动的安装在下壳体上。可以理解的是第二套轴4004的具体结构与第一套轴2026相同,本实用新型对此不再进行赘述。
65.减速齿轮组的输出齿轮4003与连接轴2023固定连接,以将减速齿轮组与吸盘固定连接在一起,进而,驱动电机4001的驱动力依次通过驱动电机4001的输出轴、减速机构4002的输入端、减速机构4002的输出端、以及连接轴2023传递至吸盘202上,进而可以控制吸盘202相对于壳体转动。
66.进一步的,为提高连接轴2023与输出齿轮4023之间的连接稳定性,在本实用新型的一些实施例中,参照图4、图6及图8所示,在连接轴2023的端部设置有多个凹部2027,输出齿轮4003上设有多个凸部4005,输出齿轮4003与连接轴2023通过多个凹部2027和多个凸部4005卡合在一起。通过卡合结构将输出齿轮4003与连接轴2023连接在一起还可以便于连接轴2023与输出齿轮4023的安装。
67.可以理解的是,连接轴2023与输出齿轮4023之间可以通过各种固定连接方式将其固定连接在一起,进而输出齿轮4023转动时可以带动连接轴2023转动。在本实用新型的一些实施例中,输出齿轮4003与连接轴2023通过螺丝固定连接。
68.在本实用新型提供的清洁装置1中,泵模组300用于抽取吸附空间内的空气,以使吸附空间内产生负压,其可以采用各种抽真空装置。在本实用新型的一些实施例中,泵模组300包括与吸附空间204连通的真空泵,以抽取吸附空间204内的空气。
69.三个泵模组300包括与三个清洁模组200的吸附空间204分别连通的三个真空泵,以分别抽取三个清洁模组200的吸附空间204的空气。即,每一个吸附空间204均与一个真空泵连接,通过控制模组分别控制三个真空泵的启停或转速大小,进而可以单独控制其对应的吸附空间204内的负压的大小,实现对三个吸盘202的吸附力大小的独立控制。
70.可以理解的是,真空泵可以采用本来用各种常用的真空泵结构,例如,真空泵可以包括驱动电机及与驱动电机连接的压缩机叶轮,通过驱动电机驱动压缩机叶轮转动,可以抽取吸附空间内的空气。真空泵的具体结构及工作原理为本领域技术人员所公知,本实用
新型对此不再进行详细赘述。
71.在本实用新型提供的清洁装置1,控制模组与泵模组300及驱动模组400连接以控制泵模组300及驱动模组400的运行。可以理解的是,本实用新型对于控制模组的具体结构没有特殊限制,其可以采用本领域各种常用的控制组件,例如cpu(中央处理单元)、pcb(印刷线路板)等,只要能实现对泵模组300及驱动模组400的控制即可。当然,控制模组还可以与清洁装置1的其他部件电连接,以对相应的部件进行控制。
72.可以理解的是,本实用新型提供的清洁装置1可以通过各种常用的方式提供动力,例如,可以通过电源线与市电或家用电插头连接以提供动力。在本实用新型的一些实施例中,清洁装置1还包括:电源模组(图中未示出),电源模组与与泵模组300、驱动模组400及控制模组电连接。在此实施例中,清洁装置1可以通过自身配置的电源模组提供电力,其应用场景更加广泛。
73.可以理解的是,本实用新型所公开的清洁装置可以适用于各种物品的表面清洁,例如,建筑物的玻璃幕墙、住宅门窗、墙面等,并不限于清洁窗户玻璃。
74.以上实施例仅用以说明本实用新型的技术方案,而非对其限制:尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1