清洁设备及清洁设备自动拆装清洁装置的方法与流程
本申请涉及电器设备,尤其涉及一种清洁设备及清洁设备自动拆装清洁装置的方法。
背景技术:
1、为满足人们对多种场景的不同清洁需求,大多数清洁设备(如清洁机器人)都具有多种功能,如具有扫地功能和拖地功能等。当地面需要扫地及拖地时,清洁设备需装有具有拖地功能的附件(如抹布),当地面只需要清扫(如地毯)时,清洁设备上的附件需移除。目前,清洁设备的附件需用户手动安装或者拆除,或通过基站上的拆装装置拆装停靠在基站处的清洁机器人上的附件。
2、手动拆装的清洁设备,用户体验不佳;基站上设置拆装装置的方案,清洁设备上需配套设置相应的结构,结构复杂。
技术实现思路
1、为解决或改善上述问题,本申请实施例提供了一种清洁设备及清洁设备自动拆装清洁装置的方法。
2、在本申请的一个实施例中,提供了一种清洁设备,该清洁设备包括:
3、设备体;
4、驱动装置,设置在所述设备体上;
5、清洁装置,与所述驱动装置可拆卸连接;
6、其中,所述驱动装置输出第一方向的旋转动力以驱动所述清洁装置执行清洁动作,输出第二方向的旋转动力使得所述清洁装置断开与所述驱动装置的连接;所述第一方向与所述第二方向为不同的方向;
7、连接或断开过程中,所述驱动装置与所述清洁装置存在旋转动力轴向的相对运动。
8、在本申请的另一个实施例中,还提供了另一种清洁设备,该清洁设备包括:
9、设备体,设有拆装引导结构;
10、清洁装置,用于对待清洁对象进行清洁;
11、其中,所述设备体朝所述清洁装置移动并在所述拆装引导结构的作用下移动至与所述清洁装置处于对接位置时,所述清洁装置与所述设备体连接。
12、在本申请的又一个实施例中,还提供了一种清洁设备,该清洁设备包括:
13、设备体,位于一平面上;
14、清洁装置,可拆卸的设置在所述设备体上;
15、其中,所述设备体具有自动拆卸所述清洁装置的功能,所述设备体拆卸所述清洁装置的过程,所述清洁装置位于所述平面上,所述设备体朝远离所述清洁装置的方向动作。
16、在本申请的又一个实施例中,还提供了一种清洁设备自动拆装清洁装置的方法。所述方法包括:
17、监测到拆卸所述清洁装置的触发事件时,生成拆卸指令;
18、响应于所述拆卸指令,控制驱动装置输出第二方向的旋转动力,使得所述清洁装置断开与所述驱动装置的连接,且所述驱动装置与所述清洁装置存在旋转动力轴向的相背运动;
19、其中,所述驱动装置输出第一方向的旋转动力时所述驱动装置与所述清洁装置连接,并能驱动所述清洁装置执行清洁动作;所述第一方向与所述第二方向为不同的方向。
20、在本申请的又一个实施例中,还提供了一种清洁设备自动拆装清洁装置的方法。所述方法包括:
21、监测到安装所述清洁装置的触发事件时,生成安装指令;
22、响应于所述安装指令,确定行进至所述清洁装置处的行进路径;
23、待所述清洁设备的设备体按所述行进路径行进至与所述清洁装置处并在所述设备体上的拆装引导结构的作用下移动至与所述清洁装置处于对接位置时,控制自动拆装机构工作以将所述清洁装置连接于所述设备体上;
24、其中,所述自动拆装机构设置在所述设备体和所述清洁装置的至少一个上。
25、本申请实施例提供的方案中,通过驱动装置输出不同方向的驱动力,清洁装置能够相对于驱动装置以不同的方向动作,以实现清洁装置与驱动装置的连接或者断开连接,当驱动装置输出第一方向的旋转动力时,驱动装置与清洁装置相互连接,驱动装置驱动清洁装置执行清洁动作,当驱动装置输出第二方向的旋转动力时,驱动装置断开与清洁装置之间的连接,从而实现清洁装置的自动拆装,结构简单,易实现。
技术特征:
1.一种清洁设备,其特征在于,包括:
2.根据权利要求1所述的清洁设备,其特征在于,所述清洁装置断开与所述驱动装置连接的过程,所述设备体的至少部分朝远离所述清洁装置的方向动作。
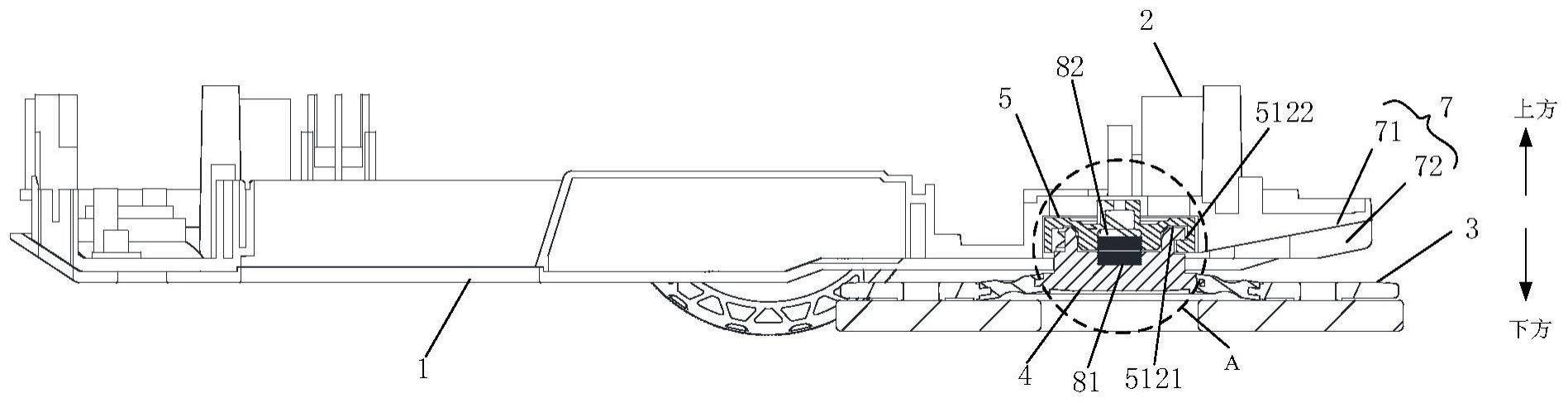
3.根据权利要求1或2所述的清洁设备,其特征在于,所述清洁装置与所述驱动装置通过螺旋机构连接。
4.根据权利要求3所述的清洁设备,其特征在于,所述螺旋机构包括第一结构及第二结构;
5.根据权利要求4所述的清洁设备,其特征在于,所述第一结构具有多个对接口及多个所述内螺旋槽;多个所述内螺旋槽分别自对应的对接口沿螺旋线段延伸;
6.根据权利要求5所述的清洁设备,其特征在于,
7.根据权利要求5所述的清洁设备,其特征在于,所述多个对接口中的至少部分对接口上设有对接引导斜面。
8.根据权利要求4所述的清洁设备,其特征在于,所述第一结构设置在所述驱动装置上、所述第二结构设置在所述清洁装置上时,所述设备体的底部设有与所述第二结构适配的引导槽;或者
9.根据权利要求8所述的清洁设备,其特征在于,所述设备体具有底壳,所述底壳朝设备体上方内陷形成所述引导槽;
10.根据权利要求1或2所述的清洁设备,其特征在于,还包括:
11.根据权利要求10所述的清洁设备,其特征在于,所述保持机构为:
12.一种清洁设备,其特征在于,包括:
13.根据权利要求12所述的清洁设备,其特征在于,还包括:
14.根据权利要求13所述的清洁设备,其特征在于,
15.一种清洁设备,其特征在于,包括:
16.根据权利要求15所述的清洁设备,其特征在于,还包括引导槽;
17.根据权利要求16所述的清洁设备,其特征在于,还包括:
18.一种清洁设备自动拆装清洁装置的方法,其特征在于,包括:
19.根据权利要求18所述的方法,其特征在于,还包括:
20.根据权利要求18所述的方法,其特征在于,还包括:
21.一种清洁设备自动拆装清洁装置的方法,其特征在于,包括:
技术总结
本申请实施例提供一种清洁设备及清洁设备自动拆装清洁装置的方法。该清洁设备包括:设备体、驱动装置及清洁装置,驱动装置设置在所述设备体上;清洁装置与所述驱动装置可拆卸连接;其中,所述驱动装置输出第一方向的旋转动力以与所述清洁装置连接,输出第二方向的旋转动力使得所述清洁装置断开与所述驱动装置的连接;所述第一方向与所述第二方向为不同的方向。本申请实施例提供的方案中,通过驱动装置输出不同的旋转动力,实现清洁装置的自动拆装,结构简单,易实现。
技术研发人员:施金雷
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!