清洁设备的垃圾处理方法、清洁设备及存储介质与流程
本技术属于自动控制,具体涉及清洁设备的垃圾处理方法、清洁设备及存储介质。
背景技术:
1、清洁设备是指具有对待清洁表面进行清洁功能的设备。一般地,清洁设备在对待清洁表面进行清洁的过程中,会将待清洁表面的灰尘、食物残渣、吸管等垃圾收集入清洁设备的收集机构中。
2、传统的清洁设备的垃圾处理方法,包括:检测收集机构当前的已使用空间;在已使用空间达到预设阈值的情况下,输出收集机构已满提示,以提示用户取出垃圾盒并对垃圾盒中的垃圾进行清理。
3、然而,垃圾在收集机构中的分布较为稀疏且不规则,这就会导致已使用空间判断不准确,收集机构内部空间的利用率不高的问题。
技术实现思路
1、本技术提供了清洁设备的垃圾处理方法、清洁设备及存储介质,可以解决垃圾在收集机构中的分布较为稀疏且不规则,导致已使用空间判断不准确,收集机构内部空间的利用率不高的问题。本技术提供如下技术方案:
2、第一方面,提供一种清洁设备的垃圾处理方法,所述清洁设备包括收集机构、压缩机构和排污机构;所述收集机构用于收集所述清洁设备工作过程中收集的垃圾,所述压缩机构用于对所述收集机构中的物体进行压缩,所述排污机构用于将所述收集机构中的物体排出所述清洁设备;所述垃圾处理方法包括:
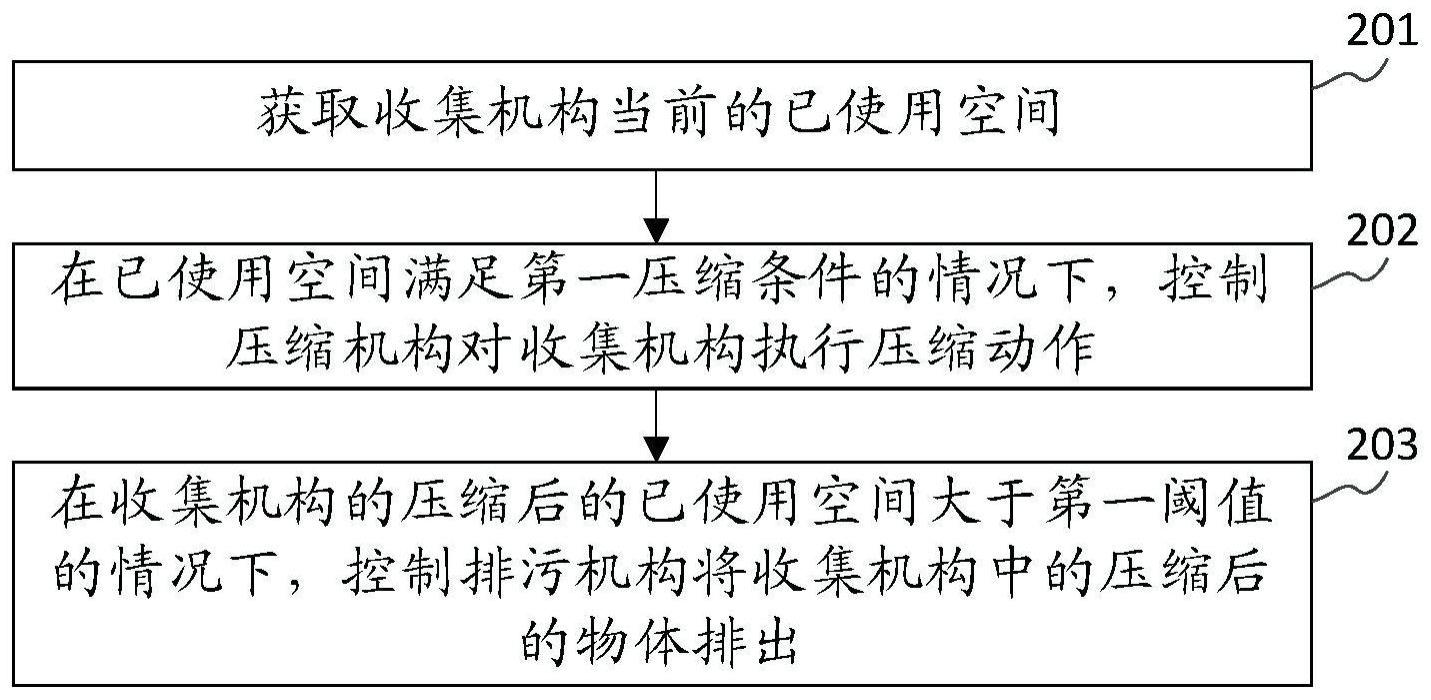
3、获取所述收集机构当前的已使用空间;
4、在所述已使用空间满足第一压缩条件的情况下,控制所述压缩机构对所述收集机构执行压缩动作;所述第一压缩条件包括所述已使用空间从小于第一阈值变为大于或等于第一阈值;
5、在所述收集机构的压缩后的已使用空间大于所述第一阈值的情况下,控制所述排污机构将所述收集机构中的压缩后的物体排出。
6、可选地,所述方法还包括:
7、在所述已使用空间满足第二压缩条件的情况下,控制所述压缩机构对所述收集机构执行压缩动作;所述第二压缩条件包括所述已使用空间从小于第二阈值变为大于或等于第二阈值,所述第二阈值小于所述第一阈值。
8、可选地,所述第二阈值包括从小至大排序的n个第二阈值,所述n为大于1的整数;
9、相应地,所述在所述已使用空间满足第二压缩条件的情况下,控制所述压缩机构对所述收集机构执行压缩动作,包括:
10、确定所述已使用空间是否满足第i个第二压缩条件,所述第i个第二压缩条件包括所述已使用空间从小于第i个第二阈值变为大于或等于第i个第二阈值,所述i依次取1至n的整数;
11、在所述已使用空间不满足第i个第二压缩条件的情况下,将i的值加1,触发执行所述确定所述已使用空间是否满足第i个第二压缩条件的步骤;
12、在所述已使用空间满足第i个第二压缩条件的情况下,控制所述压缩机构对所述收集机构执行压缩动作。
13、可选地,所述方法还包括:
14、在所述收集机构的压缩后的已使用空间小于或等于所述第一阈值的情况下,控制所述清洁设备执行清洁动作。
15、可选地,所述控制所述排污机构将所述收集机构中的压缩后的物体排出之前,还包括:
16、获取垃圾排放位置;
17、控制所述清洁设备移动至所述垃圾排放位置,以在所述垃圾排放位置排出所述压缩后的物体。
18、可选地,所述获取垃圾排放位置,包括:
19、获取在工作地图中预先标记的所述垃圾排放位置;所述工作地图为所述清洁设备当前所在的工作区域对应的区域地图。
20、可选地,所述获取在工作地图中预先标记的所述垃圾排放位置,包括:
21、显示所述工作地图;
22、接收作用于所述工作地图的标记操作;
23、将所述标记操作指示的地图位置确定为所述垃圾排放位置。
24、可选地,所述垃圾排放位置为至少两个,所述获取垃圾排放位置,包括:
25、在至少两个垃圾排放位置中确定本次使用的垃圾排放位置。
26、可选地,所述在至少两个垃圾排放位置中确定本次使用的垃圾排放位置,包括:
27、获取所述清洁设备与各个垃圾排放位置之间的相对距离;将相对距离最小的垃圾排放位置确定为所述本次使用的垃圾排放位置;
28、或者,
29、基于历史使用的垃圾排放位置确定本次使用的垃圾排放位置;
30、或者,
31、将位于未清洁区域的垃圾排放位置确定为所述本次使用的垃圾排放位置。
32、第二方面,提供一种清洁设备,所述清洁设备包括处理器和存储器;所述存储器中存储有程序,所述程序由所述处理器加载并执行以实现第一方面提供的清洁设备的垃圾处理方法。
33、第三方面,提供一种计算机可读存储介质,所述存储介质中存储有程序,所述程序被处理器执行时用于实现第一方面提供的清洁设备的垃圾处理方法。
34、本技术的有益效果至少包括:通过获取收集机构当前的已使用空间;在已使用空间满足第一压缩条件的情况下,控制压缩机构对收集机构执行压缩动作;在收集机构的压缩后的已使用空间大于第一阈值的情况下,控制排污机构将收集机构中的压缩后的物体排出;可以解决垃圾在收集机构中的分布较为稀疏且不规则,导致已使用空间判断不准确,收集机构内部空间的利用率不高的问题;由于压缩过程可以使收集机构中的物体分布更加密集和规则,从而提高已使用空间判断的准确性,因此,基于压缩后的已使用空间确定是否将物体排出,可以充分利用收集机构的空间,提高收集机构的空间利用率。
35、同时,由于可以自动控制排污机构将压缩后的物体排出,而不需要人为倾倒收集机构中的物体,因此,可以提高清洁设备的智能性,同时避免人为倾倒过程造成的二次污染。
36、同时,由于可以自动控制排污机构将压缩后的物体排出,而不需要将收集机构的物体吸入集尘桶中,可以避免集成桶因长时间存储物体而导致发生霉变、产生异味的问题,因此,可以避免污染环境。
37、另外,由于在已使用空间满足第二压缩条件的情况下,控制压缩机构对收集机构执行压缩动作,可以实现在垃圾收集过程中对垃圾收集机构内的物体分步进行压缩,避免只进行一次压缩导致的压缩效果差的问题,因此,可以提高对收集机构中的物体进行压缩的效果,进一步提高收集机构的空间使用率。
38、另外,由于在清洁过程中收集机构收集的物体是不断增多的,因此,在第二压缩条件包括至少两个的情况下,将第二压缩条件按照各自对应的第二阈值的从小至大进行排序,并依次确定已使用空间是否满足第二压缩条件,可以提高判断的效率。
39、另外,由于在压缩后的空间小于或等于第一阈值的情况下,收集机构仍能存放一定的物体,此时,控制清洁设备执行清洁动作可以继续将待清洁区域的垃圾收入收集机构中,因此,可以充分利用收集机构的空间,提高收集机构的空间利用率。
40、另外,由于先控制清洁设备移动至垃圾排放位置,再控制清洁设备排出压缩后的物体,可以避免随意排放压缩后的物体造成环境的污染,同时也便于对排出的物体进行清理。
41、另外,由于可以获取工作地图标记的垃圾排放位置,清洁设备可以使用路径规划算法直接导航至垃圾倾倒位置,因此,可以提高清洁设备的工作效率。
42、另外,由于将作用于工作地图上的标记操作指示的地图位置确定为垃圾排放位置,因此,可以使确定出的垃圾排放位置与用户期望的垃圾排放位置相匹配,同时,便于用户指定垃圾排放位置。
43、另外,由于在垃圾排放位置为至少两个的情况下,将相对距离最小的垃圾排放位置确定为本次使用的垃圾排放位置,可以缩短清洁设备到达垃圾排放位置的时间,因此,可以提高清洁设备的工作效率。
44、另外,由于在垃圾排放位置为至少两个的情况下,基于历史使用的垃圾排放位置确定本次使用的垃圾排放位置,可以使确定除的垃圾排放位置与用户的使用习惯相匹配,因此,可以便于用户对清洁设备排出的垃圾进行清理。
45、另外,由于将未清洁区域的垃圾排放位置确定为本次使用的垃圾排放位置,清洁设备在排除垃圾后,可以从排放位置所在的未清洁区域继续执行清洁动作,因此,可以提高清洁设备的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!