一种应用于扫地机器人激光指引的控制方法、系统与流程
1.本技术涉及扫地机器人的领域,尤其是涉及一种应用于扫地机器人激光指引的控制方法、系统。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
3.目前家用的扫地机器人,在使用过程中,可以自行规避障碍物进行清扫;但是,扫地机器人一般是通过扫地机器人自行规划的,若是用户根据自身需求想要优先处理部分区域的路线时,会有所不便,从而影响扫地机器人在使用过程中的灵活性。
技术实现要素:
4.为了提高扫地机器人在使用过程中的灵活性,本技术提供一种应用于扫地机器人激光指引的控制方法、系统。
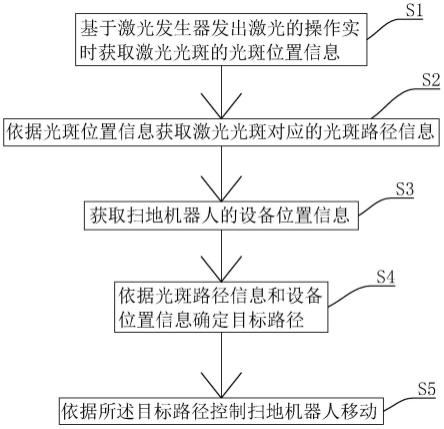
5.第一方面,本技术提供的一种应用于扫地机器人激光指引的控制方法,采用如下的技术方案:一种应用于扫地机器人激光指引的控制方法,包括如下步骤:基于激光发生器发出激光的操作实时获取激光光斑的光斑位置信息;依据光斑位置信息获取激光光斑对应的光斑路径信息;获取扫地机器人的设备位置信息;依据光斑路径信息和设备位置信息确定目标路径;依据所述目标路径控制扫地机器人移动。
6.通过采用上述技术方案,扫地机器人预先获取工作区域的图像信息,扫地机器人在室内进行扫地之后,用户想要扫地机器人优先处理部分区域,此时用户可以通过长按激光发生器,用户可以改变激光光斑的位置,此时系统可以实时获取激光光斑的光斑位置信息,并且系统可以依据光斑位置信息获取激光光斑对应的光斑路径信息,其中,光斑路径信息为用户驱动激光光斑移动的轨迹;然后系统获取扫地机器人在工作区域自身的位置信息,然后便可以通过光斑路径信息和设备位置信息确定目标路径,此时便可以扫地机器人先移动到光斑路径信息的起始点,然后再控制扫地机器人沿着目标路径进行清理工作。
7.通过上述过程,用户可以使用激光发生器便可以对扫地机器人的移动轨迹进行指引,从而可以提高扫地机器人在使用过程中的灵活性,提高用户体验感。
8.可选的,在获取光斑路径信息过程中,进行如下步骤:基于初次长按激光发生器的操作获取对应的启动控制信号;基于所述启动控制信息获取激光光斑的初始位置信息;
基于激光光斑的移动获取激光光斑的实时位置信息;基于二次长按激光发生器的操作获取对应的关闭控制信号;基于所述关闭控制信息获取激光光斑的终止位置信息;依据初始位置信息、实时位置信息以及终止位置信息确定光斑路径信息。
9.通过采用上述技术方案,由于在使用光斑发生器时,一般都是先将光斑发生器先开启,此时激光光斑已经存在,为了可以准确地获取用户想要扫地机器人移动的轨迹,所以在获取光斑路径信息时,系统基于初次长按激光发生器的操作获取对应的启动控制信号,便可以基于所述启动控制信息获取激光光斑的初始位置信息,同样的,系统基于二次长按激光发生器的操作获取对应的关闭控制信号,便可以基于二次长按激光发生器的操作获取对应的关闭控制信号,并且在光斑移动过程中,系统还获取激光光斑的实时位置信息,此时便可以结合初始位置信息、实时位置信息以及终止位置信息确定激光发生器的光斑路径信息;通过上述过程,可以准确的获取用户移动激光发生器时对应的光斑路径信息。
10.可选的,在确定光斑路径信息之后,进行如下步骤:确定目标时间段数据;获取初次长按激光发生器的初始时间点信息;基于初始时间点信息开始且在目标时间段数据内获取全部对应的实时位置信息并确定启动位置信息集合,其中,启动位置信息集合包括多个实时位置信息;获取二次长按激光发生器的关闭时间点信息;获取关闭时间点信息前且在目标时间段数据内获取全部对应的实时位置信息并确定关闭位置信息集合,其中,关闭位置信息集合包括多个实时位置信息;依据启动位置信息集合和关闭位置信息集合进行判断扫地机器人是沿着光斑路径信息行进还是行进到光斑路径信息形成的目标区域内。
11.通过采用上述技术方案,在激光光斑移动过程中,用户可能想让扫地机器人沿着光斑路径信息进行清理,也有可能在光斑路径信息形成一个清洁区域,所以系统获取启动位置信息集合与关闭位置信息集合,并且通过启动位置信息集合和关闭位置信息集合进行判断扫地机器人是沿着光斑路径信息行进还是行进到光斑路径信息形成的目标区域内;通过上述过程,扫地机器人依据清洁位置的不同,可以选择不同的行进路径,从而增加扫地机器人使用时灵活性。
12.可选的,在判断扫地机器人是沿着光斑路径信息行进还是行进到光斑路径信息形成的目标区域内过程中,进行如下步骤:判断启动位置信息集合内的实时位置信息与关闭位置信息集合内的实时位置信息是否有重合;若是没有,则控制扫地机器人沿着光斑路径信息行进;若是有,则控制扫地机器人移动至目标区域内,其中,目标区域为光斑路径信息形成的闭环。
13.通过采用上述技术方案,将启动位置信息集合内的实时位置信息与关闭位置信息集合内的实时位置信息是否有重合,若是没有,此时说明光斑路径信息为一段线段,则控制扫地机器人沿着光斑路径信息行进,此时扫地机器人将光斑路径信息对应的轨迹上进行清理工作;若是有,说明用户需要扫地机器人清理光斑路径信息内区域,则控制扫地机器人移
动至目标区域内,并且目标区域为光斑路径信息形成的闭环;通过上述过程,扫地机器人能够根据用户画出光斑路径信息进行相应的移动。
14.可选的,在控制扫地机器人移动时,进行如下步骤:调取初始位置信息;控制扫地机器人移动至初始位置信息并沿着目标路径行进;依据设备位置信息和目标区域获取扫地机器人的行进路线;依据行进路线控制扫地机器人移动至目标区域。
15.通过采用上述技术方案,在确定用户需要扫地机器人优先清理的区域后,扫地机器人可以移动至初始位置信息并沿着目标路径行进或者依据行进路线控制扫地机器人移动至目标区域,都可以精确地移动至需要优先清理的区域。
16.可选的,在获取初始位置信息和终止位置信息的过程中,进行如下步骤:基于长按激光发生器的操作获取对应的开始时间点和结束时间点,其中,开始时间点为开始长按激光发生器的时间点,结束时间点为结束长按激光发生器的时间点;获取激光光斑中心点在开始时间点对应的开始位置信息;获取激光光斑中心点在结束时间点对应的结束位置信息;判断开始位置信息与结束位置信息是否重合,若是,则获取初始位置信息和终止位置信息,否则提示重新长按激光发生器。
17.通过采用上述技术方案,在获取激光光斑中心点在开始时间点对应的开始位置信息和激光光斑中心点在结束时间点对应的结束位置信息之后,通过判断开始位置信息与结束位置信息是否重合,在系统需要确定初始位置信息和终止位置信息的过程时,可以降低用户在长按激光发生器手抖造成的影响,可以提高开始位置信息与结束位置信息的精确度。
18.可选的,在判断开始位置信息与结束位置信息是否重合时,进行如下步骤:获取开始位置信息对应的开始坐标信息;获取结束位置信息对应的结束坐标信息;确定开始坐标信息与结束坐标信息的偏差量;调取预设的偏差阈值;将偏差量与偏差阈值进行比较;若是偏差量大于偏差阈值,则提示重新长按激光发生器;否则开始位置信息与结束位置信息重合。
19.通过采用上述技术方案,通过计算开始坐标信息与结束坐标信息之间偏差量,通过将偏差量与将偏差量与偏差阈值进行比较;若是偏差量大于偏差阈值,说明用户在长按激光发生器的过程中抖动程度较大,位置信息与结束位置信息未重合,则提示重新长按激光发生器;否则开始位置信息与结束位置信息重合,便可以实现精准的获取初始位置信息和终止位置信息。
20.第二方面,本技术提供的一种应用于扫地机器人激光指引的控制系统,采用如下的技术方案:一种应用于扫地机器人激光指引的控制系统,包括:光斑位置获取模块,基于激光发生器发出激光的操作用于实时获取激光光斑的光斑位置信息;
光斑路径模块,依据光斑位置信息获取激光光斑对应的光斑路径信息;设备位置获取模块,用于获取扫地机器人的设备位置信息;确定模块,依据光斑路径信息和设备位置信息用于确定目标路径;控制模块,依据所述目标路径用于控制扫地机器人移动。
21.通过采用上述技术方案,扫地机器人预先获取工作区域的图像信息,扫地机器人在室内进行扫地之后,用户想要扫地机器人优先处理部分区域,此时用户可以通过长按激光发生器,用户可以改变激光光斑的位置,此时光斑位置获取模块可以实时获取激光光斑的光斑位置信息,并且光斑路径模块可以依据光斑位置信息获取激光光斑对应的光斑路径信息,其中,光斑路径信息为用户驱动激光光斑移动的轨迹;然后设备位置获取模块获取扫地机器人在工作区域自身的位置信息,然后确定模块便可以通过光斑路径信息和设备位置信息确定目标路径,此时便可以扫地机器人先移动到光斑路径信息的起始点,然后控制模块再控制扫地机器人沿着目标路径进行清理工作。
22.通过上述过程,用户可以使用激光发生器便可以对扫地机器人的移动轨迹进行指引,从而可以提高扫地机器人在使用过程中的灵活性,提高用户体验感。
23.第三方面,本技术提供的计算机可读存储介质,存储有能够被处理器加载并执行如一种应用于扫地机器人激光指引的控制方法的计算机程序。
24.第四方面,本技术提供的智能终端,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行如一种应用于扫地机器人激光指引的控制方法的计算机程序。
25.综上所述,本技术包括以下至少一种有益技术效果:1.用户可以使用激光发生器便可以对扫地机器人的移动轨迹进行指引,从而可以提高扫地机器人在使用过程中的灵活性,提高用户体验感。
26.2.通过结合初始位置信息、实时位置信息以及终止位置信息确定激光发生器的光斑路径信息,可以准确的获取用户移动激光发生器时对应的光斑路径信息。
27.3.通过启动位置信息集合和关闭位置信息集合进行判断扫地机器人是沿着光斑路径信息行进还是行进到光斑路径信息形成的目标区域内;扫地机器人依据清洁位置的不同,可以选择不同的行进路径,从而增加扫地机器人使用时灵活性。
附图说明
28.图1是本技术实施例一种应用于扫地机器人激光指引的控制方法的流程图;图2是本技术实施例一种应用于扫地机器人激光指引的控制方法中确定光斑路径信息的流程图;图3是本技术实施例一种应用于扫地机器人激光指引的控制方法中确定扫地机器人的清洁位置的流程图;图4是本技术实施例一种应用于扫地机器人激光指引的控制方法中判断启动位置信息集合内的实时位置信息与关闭位置信息集合内的实时位置信息是否有重合的流程图;图5是本技术实施例一种应用于扫地机器人激光指引的控制方法中获取初始位置信息的流程图;图6是本技术实施例一种应用于扫地机器人激光指引的控制方法中获取终止位置信息的流程图;
图7是本技术实施例一种应用于扫地机器人激光指引的控制系统的结构示意图。
29.附图标记说明:1、光斑位置获取模块;2、光斑路径模块;3、设备位置获取模块;4、确定模块;5、控制模块。
具体实施方式
30.以下为对本技术作进一步详细说明。
31.本技术实施例公开一种应用于扫地机器人激光指引的控制方法,参照图1和图2,包括如下步骤:s1,基于激光发生器发出激光的操作实时获取激光光斑的光斑位置信息;其中,扫地机器人在室内进行扫地之后,扫地机器人预先获取工作区域的图像信息,用户想要扫地机器人优先处理部分区域,此时用户可以通过长按激光发生器,用户可以改变激光光斑的位置。
32.s2,依据光斑位置信息获取激光光斑对应的光斑路径信息;其中,光斑路径信息为用户对扫地机器人指引路径,并且需要确定光斑路径信息的起点和终点,但是由于在使用光斑发生器时,一般都是先将光斑发生器先开启,此时激光光斑已经存在,为了可以准确地获取用户想要扫地机器人移动的轨迹,所以在获取光斑路径信息过程中,参照图2,进行如下步骤:s21,基于初次长按激光发生器的操作获取对应的启动控制信号;其中,用户在开始画出光斑路径信息时,此时基于用户初次长按激光发生器的操作,系统获取对应的启动控制信号,说明此时开始画出光斑路径信息。
33.s22,基于所述启动控制信息获取激光光斑的初始位置信息;其中,系统接收到启动控制信号时,此时激光光斑的实时位置信息为初始位置信息。
34.s23,基于激光光斑的移动获取激光光斑的实时位置信息;其中,在用户在激光光斑移动过程中,可以获取多个实时位置信息。
35.s24,基于二次长按激光发生器的操作获取对应的关闭控制信号;其中,用户在开始画出光斑路径信息后,此时基于用户二次长按激光发生器的操作,系统获取对应的关闭控制信号,说明此时结束画光斑路径信息。
36.s25,基于所述关闭控制信息获取激光光斑的终止位置信息;其中,系统接收到关闭控制信号时,此时激光光斑的实时位置信息为终止位置信息。
37.s26,依据初始位置信息、实时位置信息以及终止位置信息确定光斑路径信息;其中,将初始位置信息对应的位置作为光斑路径信息的起点、终止位置信息对应的位置作为光斑路径信息的终点、全部实时位置信息对应的位置进行连线,便可以得到光斑路径信息。
38.通过s21到s26的步骤,可以准确的获取用户移动激光发生器时对应的光斑路径信息。
39.s3,获取扫地机器人的设备位置信息;
其中,设备位置信息为扫地机器人当前在室内的位置。
40.s4,依据光斑路径信息和设备位置信息确定目标路径;其中,在确定光斑路径信息以及设备位置信息之后,通过将获取光斑路径信息的初始位置信息与设备位置信息之间的连线,便可以确定扫地机器人需要进行移动的目标路径。
41.s5,依据所述目标路径控制扫地机器人移动;其中,系统控制扫地机器人沿着目标路径进行清理工作,扫地机器人便可以将用户需要优先清理的区域进行清理工作。
42.通过上述过程,用户可以使用激光发生器便可以对扫地机器人的移动轨迹进行指引,从而可以提高扫地机器人在使用过程中的灵活性,提高用户体验感。
43.另外在在激光光斑移动过程中,用户可能想让扫地机器人沿着光斑路径信息进行清理,也有可能在光斑路径信息形成一个清洁区域,所以需要先确定扫地机器人的清洁位置,参照图3,所以还进行如下步骤:s261,确定目标时间段数据;其中,目标时间段数据为用户移动激光光斑过程中时长中的一段时间。
44.s262,获取初次长按激光发生器的初始时间点信息;其中,在用户初次长按激光发生器时,获取当前的时间点信息作为初始时间点信息。
45.s263,基于初始时间点信息开始且在目标时间段数据内获取全部对应的实时位置信息并确定启动位置信息集合;其中,在开始初次长按激光发生器之后,以初始时间点信息作为开始,往后获取目标时间段数据内的全部实时位置信息。
46.s264,获取二次长按激光发生器的关闭时间点信息;其中,在用户二次长按激光发生器时,获取当前的时间点信息作为关闭时间点信息。
47.s265,获取关闭时间点信息前且在目标时间段数据内获取全部对应的实时位置信息并确定关闭位置信息集合;其中,在开始二次长按激光发生器之后,以关闭时间点信息作为结束,往前获取目标时间段数据内的全部实时位置信息。
48.s266,依据启动位置信息集合和关闭位置信息集合进行判断扫地机器人是沿着光斑路径信息行进还是行进到光斑路径信息形成的目标区域内。
49.参照图4,s2661, 判断启动位置信息集合内的实时位置信息与关闭位置信息集合内的实时位置信息是否有重合;s266111,若是没有,此时说明光斑路径信息为一段线段,则控制扫地机器人沿着光斑路径信息行进,此时扫地机器人将光斑路径信息对应的轨迹上进行清理工作。
50.s266112, 调取初始位置信息。
51.s266113, 控制扫地机器人移动至初始位置信息并沿着目标路径行进。
52.s266121,若是有,则控制扫地机器人移动至目标区域内,说明用户需要扫地机器人清理光斑路径信息内区域,则控制扫地机器人移动至目标区域内,并且目标区域为光斑
路径信息形成的闭环。
53.s266122,依据设备位置信息和目标区域获取扫地机器人的行进路线;其中,行进路线为扫地机器人位置到目标区域之间的可移动路线,可移动路线有多个,只需保证扫地机器人能够移动到目标区域即可。
54.s266123,依据行进路线控制扫地机器人移动至目标区域。
55.通过上述过程,扫地机器人能够根据用户画出光斑路径信息进行相应的移动,并且能够确保扫地机器人移动到相应位置进行清理工作,从而提高扫地机器人使用灵活性。
56.在系统需要确定初始位置信息和终止位置信息的过程时,用户在长按激光发生器可能存在手抖的情况,可能会影响初始位置信息和终止位置信息的精确度,所以在获取初始位置信息的过程中,参照图5,进行如下步骤:s221,基于长按激光发生器的操作获取对应的开始时间点和结束时间点,其中,开始时间点为开始长按激光发生器的时间点,结束时间点为结束长按激光发生器的时间点。
57.s222,获取激光光斑中心点在开始时间点对应的开始位置信息;其中,开始位置信息为开始初次长按激光发生器时激光光斑的位置。
58.s223,获取激光光斑中心点在结束时间点对应的结束位置信息;其中,结束位置信息为结束初次长按激光发生器时激光光斑的位置。
59.s224,判断开始位置信息与结束位置信息是否重合,具体如以下步骤:s2241,获取开始位置信息对应的开始坐标信息;其中,开始坐标信息为开始位置信息在图像信息内的坐标信息。
60.s2242,获取结束位置信息对应的结束坐标信息;其中,结束坐标信息为结束位置信息在图像信息内的坐标信息。
61.s2243,确定开始坐标信息与结束坐标信息的偏差量;通过计算结束坐标信息对应的坐标信息与开始坐标信息对应的坐标信息之间的距离,便可以得到偏差量。
62.s2244,调取预设的偏差阈值。
63.s2245,将偏差量与偏差阈值进行比较;若是偏差量大于偏差阈值,说明在初次长按激光发生器时,用户手部抖动程度过大,无法确定获取初始位置信息,则提示重新长按激光发生器;否则开始位置信息与结束位置信息重合,说明可以精准确定初始位置信息。
64.同样的,获取终止位置信息的过程中,参照图6,进行如下步骤:s241,基于长按激光发生器的操作获取对应的开始时间点和结束时间点,其中,开始时间点为开始长按激光发生器的时间点,结束时间点为结束长按激光发生器的时间点。
65.s222,获取激光光斑中心点在开始时间点对应的开始位置信息;其中,开始位置信息为开始二次长按激光发生器时激光光斑的位置。
66.s223,获取激光光斑中心点在结束时间点对应的结束位置信息;其中,结束位置信息为结束二次长按激光发生器时激光光斑的位置。
67.s224,判断开始位置信息与结束位置信息是否重合,具体如以下步骤:s2241,获取开始位置信息对应的开始坐标信息;其中,开始坐标信息为开始位置信息在图像信息内的坐标信息。
68.s2242,获取结束位置信息对应的结束坐标信息;
其中,结束坐标信息为结束位置信息在图像信息内的坐标信息。
69.s2243,确定开始坐标信息与结束坐标信息的偏差量;通过计算结束坐标信息对应的坐标信息与开始坐标信息对应的坐标信息之间的距离,便可以得到偏差量。
70.s2244,调取预设的偏差阈值。
71.s2245,将偏差量与偏差阈值进行比较;若是偏差量大于偏差阈值,说明在二次长按激光发生器时,用户手部抖动程度过大,无法确定获取终止位置信息,则提示重新长按激光发生器;否则开始位置信息与结束位置信息重合,说明可以精准确定终止位置信息。
72.本技术实施例一种应用于扫地机器人激光指引的控制方法的实施原理为:扫地机器人在室内进行扫地之后,扫地机器人预先获取工作区域的图像信息,用户想要扫地机器人优先处理部分区域,此时系统基于激光发生器发出激光的操作实时获取激光光斑的光斑位置信息,然后依据全部光斑位置信息获取激光光斑对应的光斑路径信息,在光斑路径信息时,基于初次长按激光发生器的操作获取对应的启动控制信号,然后系统基于所述启动控制信息获取激光光斑的初始位置信息,便可以基于激光光斑的移动获取激光光斑的实时位置信息,系统再基于二次长按激光发生器的操作获取对应的关闭控制信号,依据所述关闭控制信息获取激光光斑的终止位置信息;在系统获取初始位置信息、实时位置信息以及终止位置信息,将初始位置信息对应的位置作为光斑路径信息的起点、终止位置信息对应的位置作为光斑路径信息的终点、全部实时位置信息对应的位置进行连线,便可以准确的获取用户移动激光发生器时对应的光斑路径信息。
73.在精准地确定光斑路径信息之后,系统获取扫地机器人的设备位置信息,在确定光斑路径信息以及设备位置信息之后,通过将获取光斑路径信息的初始位置信息与设备位置信息之间的连线,便可以确定扫地机器人需要进行移动的目标路径,系统控制扫地机器人沿着目标路径进行清理工作,扫地机器人便可以将用户需要优先清理的区域进行清理工作。
74.另外在在激光光斑移动过程中,用户可能想让扫地机器人沿着光斑路径信息进行清理,也有可能在光斑路径信息形成一个清洁区域,所以需要先确定扫地机器人的清洁位置,所以还进行如下步骤:系统确定目标时间段数据,然后获取初次长按激光发生器的初始时间点信息,基于初始时间点信息开始且在目标时间段数据内获取全部对应的实时位置信息并确定启动位置信息集合,获取二次长按激光发生器的关闭时间点信息,再获取关闭时间点信息前且在目标时间段数据内获取全部对应的实时位置信息并确定关闭位置信息集合,最后依据启动位置信息集合和关闭位置信息集合进行判断扫地机器人是沿着光斑路径信息行进还是行进到光斑路径信息形成的目标区域内。
75.再判断关闭位置信息集合内的实时位置信息与关闭位置信息集合内的实时位置信息是否有重合,若是没有,此时说明光斑路径信息为一段线段,则调取初始位置信息调取初始位置信息,控制扫地机器人移动至初始位置信息并沿着目标路径行进;若是有,则控制扫地机器人移动至目标区域内,说明用户需要扫地机器人清理光斑路径信息内区域,则依据设备位置信息和目标区域获取扫地机器人的行进路线,然后控制扫地机器人依据行进路线移动至目标区域。
76.综上所述,用户可以使用激光发生器便可以对扫地机器人的移动轨迹进行指引,
从而可以提高扫地机器人在使用过程中的灵活性,提高用户体验感。
77.第二方面,本技术提供的一种应用于扫地机器人激光指引的控制系统,参照图7,包括:光斑位置获取模块1,基于激光发生器发出激光的操作用于实时获取激光光斑的光斑位置信息;光斑路径模块2,依据光斑位置信息获取激光光斑对应的光斑路径信息;设备位置获取模块3,用于获取扫地机器人的设备位置信息;确定模块4,依据光斑路径信息和设备位置信息用于确定目标路径;控制模块5,依据所述目标路径用于控制扫地机器人移动。
78.本技术实施例一种应用于扫地机器人激光指引的控制系统的实施原理为:扫地机器人预先获取工作区域的图像信息,扫地机器人在室内进行扫地之后,用户想要扫地机器人优先处理部分区域,此时用户可以通过长按激光发生器,用户可以改变激光光斑的位置,此时光斑位置获取模块1可以实时获取激光光斑的光斑位置信息,并且光斑路径模块2可以依据光斑位置信息获取激光光斑对应的光斑路径信息,其中,光斑路径信息为用户驱动激光光斑移动的轨迹;然后设备位置获取模块3获取扫地机器人在工作区域自身的位置信息,然后确定模块4便可以通过光斑路径信息和设备位置信息确定目标路径,此时便可以扫地机器人先移动到光斑路径信息的起始点,然后控制模块5再控制扫地机器人沿着目标路径进行清理工作。
79.通过上述过程,用户可以激光发生器便可以对扫地机器人的移动轨迹进行指引,从而可以提高扫地机器人在使用过程中的灵活性,提高用户体验感。
80.第三方面,本技术提供的计算机可读存储介质,存储有能够被处理器加载并执行如一种应用于扫地机器人激光指引的控制方法的计算机程序。
81.第四方面,本技术提供的智能终端,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行如一种应用于扫地机器人激光指引的控制方法的计算机程序。
82.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1