一种带有Linux驱动板的多功能医疗服务机器人
一种带有linux驱动板的多功能医疗服务机器人
技术领域
1.本发明涉及服务机器人技术领域,具体为一种带有linux驱动板的多功能医疗服务机器人。
背景技术:
2.linux驱动指操作硬件,让硬件工作起来的程序代码,这段代码叫做硬件的驱动程序。linux驱动也指的是指操作系统中用来控制硬件的逻辑方法的那部分代码。操作系统有很多种,比如:windows有windows驱动,ios有ios驱动,android有android驱动,而linux驱动则是针对linux操作系统平台。
3.随着科学技术的快速发展和智能化与现代化的不断进步,出现了越来越多的服务机器人,这些服务机器人以其智能性、高效性和给人们生活带来的方便性,普遍得到了人们的接受和喜爱,有些医疗服务机器人已经可以替代人工在人们的日常生活中被广泛地使用,从而降低了节省了人力物力,然而目前大多数的机器人只能完成针对性的功能,同时在家里安置多个机器人去完成不同的工作十分不变,尤其是一些老人独居时,没有能力操控多于一个机器人,因此设计一款多功能服务机器人是十分有必要的。
技术实现要素:
4.本发明的目的在于提供一种带有linux驱动板的多功能医疗服务机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种带有linux驱动板的多功能医疗服务机器人,包括座面,所述座面下方均匀固定设置有四个凳腿,四个所述凳腿下方均设置有万向轮,前侧的两个所述凳腿外部固定设置有外螺纹,前侧的两个所述凳腿上设置有升降脚板机构并螺纹连接;所述座面上位于后侧的两个所述凳腿上方固定设置有椅背,所述椅背上方与内部固定设置有监控警报机构;所述座面两侧上方均固定设置有扶手,其中一个所述扶手内嵌有折叠桌并转动链接;另一个所述扶手内部固定嵌有linux驱动板ⅰ,另一个所述扶手上方依次设置有若干功能键。
6.优选的,所述升降脚板机构包括外螺纹、螺筒、从动齿轮、驱动盒、横杆、脚板、驱动齿轮和驱动电机,前侧的两个所述凳腿外均套有所述螺筒并螺纹链接,两个所述螺筒上分别固定设置有所述横杆的两端,所述横杆中间固定设置有所脚板,其中一个所述螺筒上方外部固定设置有所述从动齿轮,所述从动齿轮一侧设置有与之啮合的所述驱动齿轮,所述驱动齿轮中心固定套有所述驱动电机的轴,所述驱动电机设置在所述驱动齿轮下方,所述驱动电机和驱动齿轮均固定设置在所述驱动盒内部,所述驱动盒固定设置在所述横杆一侧上方。
7.优选的,所所述监控警报机构包括警报铃、警报灯、复位键、竖杆、电机、相机架、摄
像机、转动电机、电机盒和转轴,所述椅背上方中间固定设置有所述竖杆,所述竖杆上方内部固定嵌有所述电机,c字形的所述相机架固定设置在所述电机的轴上,所述相机架一端固定设置有所述电机盒,所述电机盒内部固定设置有所述所述转动电机,所述转动电机的轴固定设置在所述摄像机的一侧,所述摄像机的另一侧固定设置有所述转轴的一端,所述转轴的另一端设置在所述相机架的另一端上并转动连接;所述椅背上方一侧固定设置有所述警报铃和警报灯,另一侧固定设置有所述复位键;所述椅背内部嵌有处理器和linux驱动板ⅱ。
8.优选的,所所述处理器、linux驱动板ⅱ、复位键、警报铃、警报灯、摄像机、电机和转动电机之间电性连接。
9.优选的,所所述折叠桌包括短板、转动轴、长板、桌面和空槽,其中一个所述扶手上开设有所述空槽,所述空槽内部一角固定设置有所述转动轴,所述转动轴外套有所述短板并转动连接,所述短板的一端铰接有所述长板,所述长板一侧铰接有所述桌面。
10.优选的,所若干所述功能键包括向前键、向后键、向左键、向右键、升键、降键、停止键、左转键和右转键;两个所述扶手前侧与所述椅背后侧均固定设置有红外传感器,所述向前键、向后键、向左键、向右键、升键、降键、停止键、左转键、右转键、红外传感器和linux驱动板ⅰ之间电性连接。
11.优选的,所所述座面上方活动设置有柔性棉垫。
12.与现有技术相比,本发明的有益效果是:本发明设计有座椅,使得机器人陪伴老人出门时,可供腿脚不便的老人歇息,通过升降脚板机构使得老人坐在上面时更加舒适,通过监控警报机构,将来访人员与事先录入的面部相对比,实现了居家安防功能,通过linux驱动板控制机器人的动作,使得机器人更灵敏,操作更灵活,提升了实用性。
附图说明
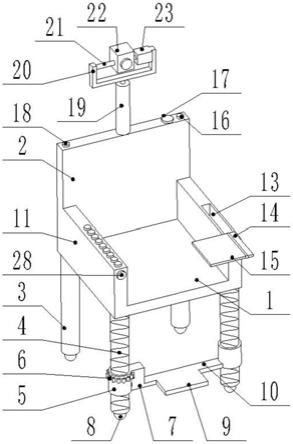
13.图1为本发明的主要结构示意图;图2为本发明的主要结构主视图;图3为本发明的主要结构后侧视图;图4为本发明的升降脚板机构示意图;图5为本发明的功能键示意图;图6为本发明的折叠桌示意图。
14.图中:1、座面,2、椅背,3、凳腿,4、外螺纹,5、螺筒,6、从动齿轮,7、驱动盒,8、万向轮,9、脚板,10、横杆,11、扶手,12、转动轴,13、空槽,14、长板,15、桌面,16、警报铃,17、警报灯,18、复位键,19、竖杆,20、相机架,21、转轴,22、摄像机,23、电机盒,24、驱动齿轮,25、驱动电机,26、转动电机,27、电机,28、红外传感器,29、短板,30、向前键,31、向后键,32、向左键,33、向右键,34、升键,35、降键,36、停止键,37、左转键,38、右转键。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.请参阅图1-6,本发明提供一种技术方案:一种带有linux驱动板的多功能医疗服务机器人,包括座面1,座面1上方活动设置有柔性棉垫,提高舒适度,座面1下方均匀固定设置有四个凳腿3,四个凳腿3下方均设置有万向轮8,使得此机器人可以根据指令往任意方向移动;前侧的两个凳腿3外部固定设置有外螺纹4,前侧的两个凳腿3上设置有升降脚板机构并螺纹连接;老人将脚放置在升降脚板机构机构上,并上下调节至适中位置,提升老人舒适度。
17.升降脚板机构包括外螺纹4、螺筒5、从动齿轮6、驱动盒7、横杆10、脚板9、驱动齿轮24和驱动电机25,前侧的两个凳腿3外均套有螺筒5并螺纹链接,两个螺筒5上分别固定设置有横杆10的两端,横杆10中间固定设置有所脚板9,其中一个螺筒5上方外部固定设置有从动齿轮6,从动齿轮6一侧设置有与之啮合的驱动齿轮24,驱动齿轮24中心固定套有驱动电机25的轴,驱动电机25设置在驱动齿轮24下方,驱动电机25和驱动齿轮24均固定设置在驱动盒7内部,驱动盒7固定设置在横杆10一侧上方。驱动电机25启动后,带动驱动齿轮24转动,从而带动从动齿轮6转动,带动螺筒5转动,由于横杆10的约束作用,使得螺筒5转动的同时沿着凳腿3上下移动,并带动脚板9上下移动。
18.座面1上位于后侧的两个凳腿3上方固定设置有椅背2,椅背2上方与内部固定设置有监控警报机构;在室内时,起到安防作用。
19.监控警报机构包括警报铃16、警报灯17、复位键18、竖杆19、电机27、相机架20、摄像机22、电机26、电机盒23和转轴21,椅背2上方中间固定设置有竖杆19,竖杆19上方内部固定嵌有电机27,c字形的相机架20固定设置在电机27的轴上,相机架20一端固定设置有电机盒23,电机盒23内部固定设置有转动电机26,转动电机26的轴固定设置在摄像机22的一侧,摄像机22的另一侧固定设置有转轴21的一端,转轴21的另一端设置在相机架20的另一端上并转动连接;linux驱动板ⅱ通过控制转动电机26和电机27来控制摄像机22的角度,使其能够全面的拍摄屋内屋外院内等地,安防更加严谨。
20.椅背2上方一侧固定设置有警报铃16和警报灯17,另一侧固定设置有复位键18;椅背2内部嵌有处理器和linux驱动板ⅱ。处理器、linux驱动板ⅱ、复位键18、警报铃16、警报灯17、摄像机22、电机27和转动电机26之间电性连接。将摄像机拍摄到的人脸图像与事先录入的人脸图像进行对比,若拍摄到的人脸图像在事先录入的人脸图像库内,则对其不进行警报,若处理器为识别到此人脸,则启动警报铃16和警报灯17,老人前来查看,发现此人无危险后,按下复位键18,警报铃16和警报灯17停止,若警报铃16和警报灯17启动超过10min,则自动报警。
21.座面1两侧上方均固定设置有扶手11,其中一个扶手11内嵌有折叠桌并转动链接;折叠桌包括短板29、转动轴12、长板14、桌面15和空槽13,其中一个扶手11上开设有空槽13,空槽13内部一角固定设置有转动轴12,转动轴12外套有短板29并转动连接,短板29的一端铰接有长板14,长板14一侧铰接有桌面15。转动短板29,将折叠桌翻出短板29,短板29与长板14之间的铰接点的转动范围为0
°‑
90
°
,翻开桌面15,桌面15与桌面15之间的铰接点的转动范围为0
°‑
90
°
,此时形成一个便捷桌面。
22.另一个扶手11内部固定嵌有linux驱动板ⅰ,另一个扶手11上方依次设置有若干功能键。若干功能键包括向前键30、向后键31、向左键32、向右键33、停止键36、左转键37、右转键38,控制机器人的运动方向,升键34和降键35可以调节脚板9的位置;两个扶手11前侧与椅背2后侧均固定设置有红外传感器28,防止操作失误时,发生撞击,提升安全性,向前键30、向后键31、向左键32、向右键33、升键34、降键35、停止键36、左转键37、右转键38、红外传感器28和linux驱动板ⅰ之间电性连接。通过linux驱动板ⅰ使得机器人的操控更灵敏,运动更灵活,可以实现细微的角度调控。
23.本发明的工作原理为:居家时,可以起到安防作用,转动电机26和电机27控制摄像机22的角度,使其能够全面的拍摄屋内屋外院内等地。当拍摄到有人来时,将摄像机拍摄到的人脸图像与事先录入的人脸图像进行对比,若拍摄到的人脸图像在事先录入的人脸图像库内,则对其不进行警报,若处理器为识别到此人脸,则启动警报铃16和警报灯17,老人前来查看,发现此人无危险后,按下复位键18,警报铃16和警报灯17停止,若警报铃16和警报灯17启动超过10min,则自动报警。
24.外出时,可以充作电动轮椅,老人坐下后,按动升键34或降键35,驱动电机25启动后,带动驱动齿轮24转动,从而带动从动齿轮6转动,带动螺筒5转动,由于横杆10的约束作用,使得螺筒5转动的同时沿着凳腿3上下移动,并带动脚板9上下移动。想移动时,按动向前键30、向后键31、向左键32、向右键33、停止键36、左转键37、右转键38,控制机器人的运动方向。三个红外传感器28,可以防止操作失误时,发生撞击,提升安全性。有需要时,转动短板29,将折叠桌翻出短板29,翻开桌面15,此时形成一个便捷桌面。
25.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1