一种手势感应控制的洗碗机及控制方法与流程
1.本发明涉及厨房电器技术领域,更具体涉及一种手势感应控制的洗碗机及控制方法。
背景技术:
2.洗碗机已经广泛应用于人们的生活,现有的洗碗机多需要用户用手直接按压开关,或者用手直接接触控制面板上相应按键来控制洗碗机工作。这种用手接触按键的方式,若不清洗或消毒按键开关,时间长久后,容易累积脏污病菌,特别是厨房间,接触控制开关,使得控制开关上不可避免地留有病菌等物质,给用户的健康带来了隐患,具有改进的空间。
技术实现要素:
3.针对现有技术的不足,本发明提供了一种手势感应控制的洗碗机及控制方法,通过手势工作控制洗碗机的启闭,有效的避免了与洗碗机的接触,从而降低了病菌的交叉传播,保证了使用安全性。
4.为实现上述目的,本发明提供了如下技术方案:一种手势感应控制的洗碗机,包括洗碗机主体、手势采集模块、手势识别模块和控制模块;所述手势采集模块贴敷在洗碗机主体上,为红外传感器阵列或者电容传感器阵列,用于捕捉用户的手势并生成对应的图像数据;所述手势识别模块与手势采集模块信号连接,用于接收并处理图像数据,生成并输出对应的手势信号;所述控制模块与手势识别模块信号连接,用于接收并处理手势信号,生成并输出控制对应电磁阀启闭的控制信号。
5.进一步,所述手势采集模块为电容传感器阵列,通过捕捉手掌或者手指接近电容传感器所引发的电容值变化以生成对应图像数据。
6.进一步,所述手势采集模块的电容传感器包括由金属片、电感和参考电容组合形成的lc震荡电路,通过震荡频率的变化以采集手掌接近或手势变化的信息,其中该金属片设置在洗碗机主体的前面板背面上。
7.进一步,所述手势采集模块的多个传感器呈圆形、环形、正方形或者手掌形布置。
8.进一步,所述手势识别模块为电容数字转化器,所述控制模块为单片机数字控制系统,所述手势识别模块用于将图像数据转化为能够被单片机数字控制系统所接收和处理的数字信息。
9.一种洗碗机手势感应控制方法,包括以下步骤,1)手势采集模块通过捕捉手掌或者手指接近传感器所引发的变化以生成对应图像数据;2)手势识别模块将手势采集模块输送过来的传感器信号转化为可供控制模块系统识别的数字信息;
3)控制模块接收手势识别模块转化的数字信息后,通过程序对得到的数据进行处理和运算,获得手势动作以控制洗碗机工作,控制模块内以数字信息保存有手势工作信号。
10.主控系统实时检测人手是否有接近,控制逻辑为,手势识别模块与控制模块的mcu微处理器连接,mcu微处理器通过i2c通讯方式,能访问到手势识别模块寄存器内的数字值,mcu微处理器接收到数字值后,按照程序控制逻辑,若数字值没有低于阀值,则表示人手没有接近感应区域,则对接近标志置0;若低于阀值,则再判断各通道是否已有接近标志,各通道的接近标志,是 mcu微处理的变量区,设置的标识变量,表示手势采集模块有人手靠近;在控制系统上电后,该接近标志初始化为0,若程序判断当前的接近标志为0,则对通道的接近标志置1;然后休眠300微秒,进入下一次的判断和查询,对各个通道都执行判断和查询,如此不停地循环查询实时实时检测。
11.综上所述,本发明与现有技术相比,结构简单、合理,通过非接触方式的手势动作控制洗碗机工作,使得用户在使用洗碗机过程中无须用手频繁按压按键,进而减少脏污,细菌等留在洗碗机上的情况,避免交叉感染,有利于饮食卫生和身体健康。
附图说明
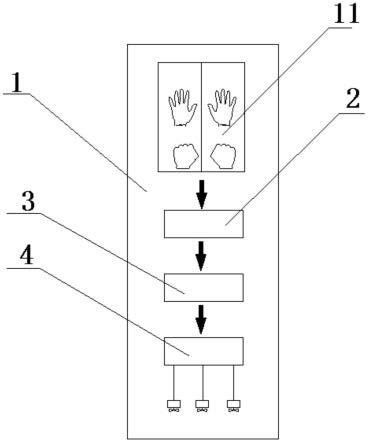
12.图1是本发明实施例电路原理组合图;图2是本发明实施例传感器阵列原理图;图3是本发明实施例洗碗机控制流程图;图4 是本发明实施例手势动作信息组合图;图5是本发明实施例金属片在前面板上的贴装结构图。
13.标注说明:1、洗碗机主体;11、前面板;2、手势采集模块;21、第一金属片;22、第二金属片;23、第三金属片;24、第四金属片;3、手势识别模块;4、控制模块。
具体实施方式
14.参照图1至图5对本发明一种手势感应控制的洗碗机的具体实施方式作进一步的说明,但应当理解本发明的保护范围并不受具体实施方式的限制。
15.一种手势感应控制的洗碗机如图1所示,包括洗碗机主体1、手势采集模块2、手势识别模块3和控制模块4。其中,洗碗机主机1具有洗涤餐具功能,用于控制洗涤功能的电磁阀、用于控制洗碗机的门打开或关闭的电磁阀 、在控制洗涤功能的电磁阀上设置有用于控制开或关的洗涤泵、喷淋臂,设置的喷淋臂上设置有用于控制路径通断的水路电磁阀,出水路径上设置有用于控制路径通断的进水电磁阀;手势采集模块2贴敷设置在洗碗机主体1的前面板11上,该手势采集模块2为红外传感器阵列或者电容传感器阵列,用于捕捉用户的手势并生成对应的图像数据;手势识别模块3与手势采集模块2信号连接,该手势识别模块3用于接收并处理图像数据,生成并输出对应的手势信号;控制模块4与手势识别模块3信号连接,用于接收并处理手势信号,生成并输出用于控制洗碗机执行相应的洗涤操作。
16.如图2、图3、图4和图5所示,该手势采集模块2优选为电容传感器阵列,通过捕捉手掌或者手指接近电容传感器所引发的电容值变化以生成对应图像数据。该手势采集模块2的电容传感器包括由金属片、电感和参考电容组合形成的lc震荡电路,通过震荡频率的变化以采集手掌接近或手势变化的信息。如图5所示,金属片设置在洗碗机主体1的前面板11
背面上以对应在洗碗机主体1的前面板11形成感应区;手势识别模块3优选为fdc2214电容数字转化器,控制模块4为单片机数字控制系统,该电容数字转化器用于将手势采集模块2输送过来的电容传感器信号转化为可供单片机数字控制系统识别的数字信息,该单片机数字控制系统接收电容数字转换器的数字信息后,通过程序对得到的数据进行处理和运算,获得手势动作以控制洗碗机工作,单片机数字控制系统内以数字信息保存有手势工作信号。
17.具体的,如图2所示,手势采集模块2的金属片采用0.5mm厚,直径10mm的板片并排列成特定形状的感应区域:如环形,圆形,正方形等,优选为手掌形。在本实施例中,该金属片为4片,分别为第一金属片21、第二金属片22、第三金属片23和第四金属片24,该第一金属片21对应设置在手掌形的小拇指处,第二金属片22对应设置在食指处,第三金属片23对应设置在掌心处,第四金属片24对应设置在大拇指处;如图2所示,该第一金属片21与电感l1,参考电容c1组成电路网络,第一金属片21的一端接地,另一端与电感l1、参考电容c1连接,并接入电容数字转换器in0a引脚,电容数字转换器in0b引脚与电感l1、参考电容c1的两个引脚连接,由上述连接方式形成的电路网络以构成in0通道的第一手势采集点;同理,采用上述方式,对应第二金属片22、第三金属片23、第四金属片24处分别形成in1通道的第二手势采集点、in2通道的第三手势采集点和in3通道的第四手势采集点。
18.在配置实际手势采集模块2时,优选的选择18uh屏蔽smd电感和33pf电容并联,产生6.5mhz的振荡频率。在in0通道里,金属片接入in0a引脚,与目标物体(人手)一起形成可变电容器。当人手接近金属片,可变电容器的容值发生变化,导致lc振荡电路的振荡频率降低。
19.手势识别模块3,优选地为fdc2214电容数字转换器,手势采集模块2所采集到的振荡频率降低,送入fdc2214;若因人手接近金属片而导致振荡频率变低,而被手势识别模块3fdc2214所测量,该模块输出与振荡频率成正比例的数字值,按fdc2214的规格书所描述的,数字值与频率的关系为datax=fsensor *228 /fref,其中,fsensor为由手势采集模块2的等效电容值。这个电容值会随人手的接近和离开,发生改变;fref为fdc2214电容数字转换器内部的参考频率。该频率由使用者设定,为一个固定值; datax为fdc2214电容数字转换器内存储数字值的寄存器。
20.参照图2,上述手势识别模块3与控制模块4的mcu微处理器连接,mcu微处理器通过i2c通讯方式,能访问到寄存器datax内的数字值。
21.参照图3,mcu微处理器接收到数字值后,按照程序控制逻辑,若数字值没有低于阀值,则表示人手没有接近金属片的感应区域,则对接近标志置0;若低于阀值,则再判断各通道是否已有接近标志,各通道的接近标志,是 mcu微处理的变量区,设置的标识变量,表示由金属片所组成的手势采集模块2,有人手靠近;在控制系统上电后,该接近标志初始化为0, 若程序判断当前的接近标志为0,则对通道的接近标志置1; 然后休眠300微秒,进入下一次的判断和查询。以上控制逻辑,对4个通道都执行判断和查询,如此不停地循环查询,构成了主控系统实时检测人手是否接近。
22.在mcu微处理器获得4个通道的接近标志,该4个接近标志组成了4位的数据。参考图4,这里以手势为拇指张开,四指收紧为例。当人手以这样的手势接近手势采集模块2时,金属片2和金属片3所在的可变电容器,其容值发生改变,改变后的容值也改变了lc振荡频
率,改变后的震荡频率被fdc2214芯片所识别,转换成改变后的数字值。转变后的数字值,mcu微处理器通过访问获得,并通过已设计的程序逻辑运算。最终得到0 0 1 1 的二进制数字信息。0表示金属片处,人手没有接近;1表示金属片处,有人手接近。
23.在mcu微处理器0 0 1 1的二进制数字信息,可进一步的,把该信息作为某一控制命令。在洗碗机主控系统里,可设置成洗涤命令。该洗涤命令,可由洗碗机主控系统输出,通过连接的驱动组件,比如mos管,三极管,可控硅,继电器等,间接控制特定的电磁阀,电机等驱动部件。
24.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1