障碍物的检测方法及装置、机器人及存储介质与流程
本发明属于清洁装置,具体涉及一种障碍物的检测方法及装置、机器人及存储介质。
背景技术:
1、随着科技的发展,人们生活水平的提高,机器人以吸尘器、洗地机等清洁设备为例,将人们从繁杂的清洁工作中释放出来,既能保持家居、办公等环境的洁净,又能让人们享有更多的空闲时间,而被人们所青睐。
2、实际应用场景中存在部分障碍物位置经常出现变动的情况,例如凳子、散落在地上的小物品(如鞋子、袜子)等等,需要清洁设备在移动过程中持续进行障碍物的识别,以便于在障碍物出现变动时及时更新清洁地图以及清洁路线,使得清洁设备的清洁工作更符合实际场景,提高用户使用体验感。而受外界复杂环境或者识别算法的影响,该分部物品的识别准确性本身较难得到保障,易出现误识别或者障碍物位置信息确定不准确的情况,进而可能导致清洁设备不能有效避障或者清洁路径不符合实际场景,影响清洁设备的安全运行以及清洁效果。
技术实现思路
1、本发明提供一种障碍物的检测方法及装置、机器人及存储介质,可以进一步提高障碍物检测的准确性,进而提高清洁设备运行的安全运行以及清洁效果。
2、为了实现上述目的,本发明提供一种障碍物的检测方法,该障碍物的检测方法包括:
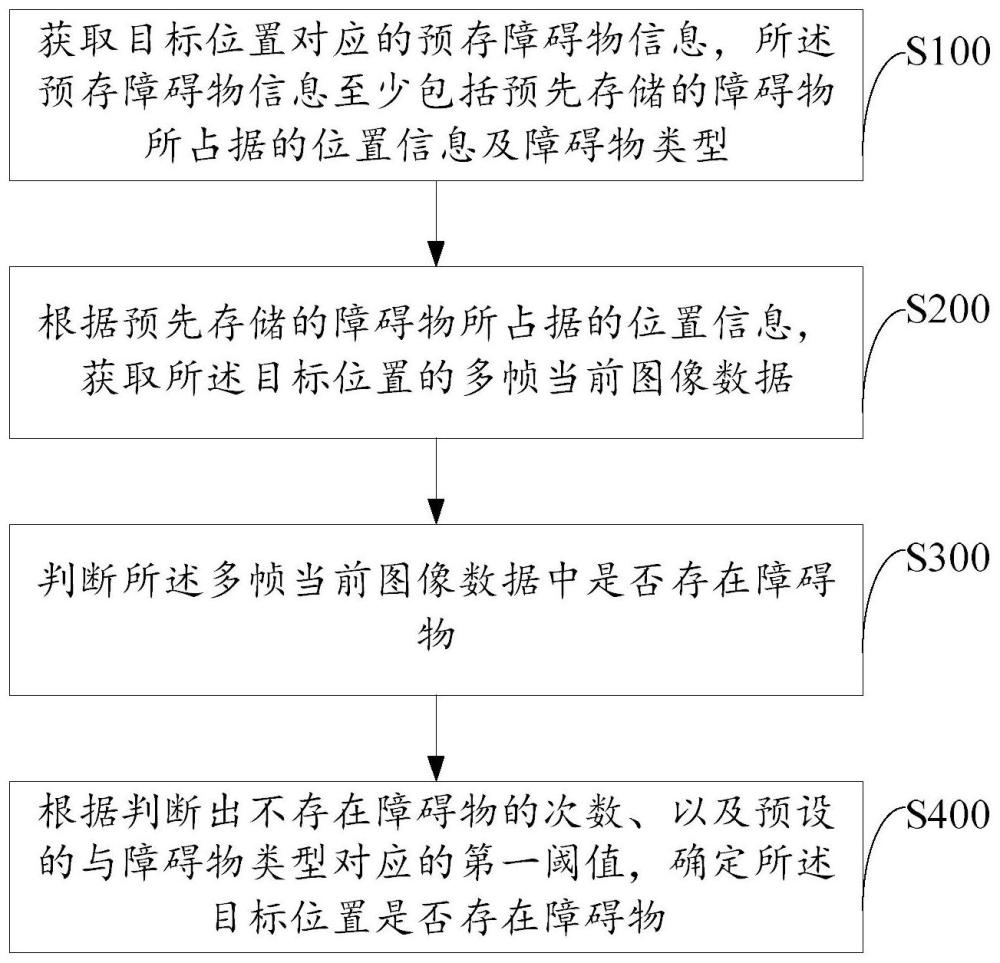
3、获取目标位置对应的预存障碍物信息,所述预存障碍物信息至少包括预先存储的障碍物所占据的位置信息及障碍物类型;
4、根据预先存储的障碍物所占据的位置信息,获取所述目标位置的多帧当前图像数据;
5、判断所述多帧当前图像数据中是否存在障碍物;
6、根据判断出不存在障碍物的次数、以及预设的与障碍物类型对应的第一阈值,确定所述目标位置是否存在障碍物。
7、优选地,在所述障碍物的检测方法中,所述障碍物所占据的位置信息至少利用激光点云数据进行表征;
8、所述方法还包括:
9、获取目标位置对应的当前激光点云数据;
10、根据所述障碍物所占据的位置信息对应的激光点云数据、以及所述当前激光点云数据的比对结果,确定所述目标位置不存在障碍物的第一概率;
11、相应地,所述根据判断出不存在障碍物的次数、以及预设的与障碍物类型对应的第一阈值,确定所述目标位置是否存在障碍物的步骤,包括:
12、根据判断出不存在障碍物的次数、以及预设的与障碍物类型对应的第一阈值,确定所述目标位置不存在障碍物的第二概率;
13、根据所述第一概率和所述第二概率,确定所述目标位置是否存在障碍物。
14、优选地,在所述障碍物的检测方法中,所述根据第一概率和第二概率,确定所述目标位置是否存在障碍物的步骤,具体包括:
15、根据第一概率、第二概率、以及障碍物类型,分别确定所述第一概率和第二概率的融合系数;
16、根据第一概率和第二概率、以及对应的融合系数,确定所述目标位置是否存在障碍物。
17、优选地,在所述障碍物的检测方法中,所述根据所述障碍物所占据的位置信息对应的激光点云数据、以及所述当前激光点云数据的比对结果,确定所述目标位置不存在障碍物的第一概率的步骤,具体包括:
18、根据所述障碍物所占据的位置信息对应的激光点云数据、以及所述当前激光点云数据,确定所述障碍物所占据的位置信息对应的激光点云数据在所述当前激光点云数据中的空闲率;
19、根据所述空闲率、以及预设的第二阈值,确定所述目标位置不存在障碍物的第一概率。
20、优选地,在所述障碍物的检测方法中,所述当前图像数据以所述障碍物所占据的位置的中心作为图像采集视场的中心位置所采集。
21、优选地,在所述障碍物的检测方法中,所述预存障碍物信息还包括障碍物建障时的第一视场范围;
22、相应地,所述根据预先存储的障碍物所占据的位置信息,获取所述目标位置的多帧当前图像数据,包括:
23、从所述第一视场范围中提取当前图像数据采集所对应的第二视场范围,其中,所述第二视场范围小于第一视场范围;
24、采集多帧所述目标位置在所述第二视场范围内的当前图像数据。
25、优选地,在所述障碍物的检测方法中,所述根据判断出不存在障碍物的次数、以及预设的与障碍物类型对应的第一阈值,确定所述目标位置是否存在障碍物的步骤之后,还包括:
26、当所述目标位置不存在障碍物,删除所述目标位置对应的预存障碍物信息。
27、优选地,在所述障碍物的检测方法中,所述预存障碍物信息还包括障碍物的预存图像数据;
28、相应地,所述检测方法还包括:
29、当目标位置存在障碍物,根据所述当前图像数据和所述预存图像数据,判断两者存在的障碍物是否为同一障碍物;
30、当判断的结果为不同障碍物时,更新所述目标位置对应的预存障碍物信息。
31、为了实现上述目的,本发明还提供一种障碍物的检测方法,其特征在于,包括:
32、获取目标位置对应的预存障碍物信息,所述预存障碍物信息至少包括预先存储的障碍物所占据的位置信息;
33、根据预先存储的障碍物所占据的位置信息,获取所述目标位置的当前激光点云数据以及多帧当前图像数据;
34、根据目标位置的当前激光点云数据以及多帧当前图像数据,确定所述目标位置是否存在障碍物。
35、为了实现上述目的,本发明还提供一种障碍物的识别装置,该障碍物的识别装置包括:
36、信息获取单元,用于获取目标位置对应的预存障碍物信息,所述预存障碍物信息至少包括预先存储的障碍物所占据的位置信息及障碍物类型;
37、图像获取单元,用于根据预先存储的障碍物所占据的位置信息,获取所述目标位置的多帧当前图像数据;
38、数据判断单元,用于判断所述多帧当前图像数据中是否存在障碍物;
39、结果确定单元,用于根据判断出不存在障碍物的次数、以及预设的与障碍物类型对应的第一阈值,确定所述目标位置是否存在障碍物。
40、为了实现上述目的,本发明还提供一种机器人,该机器人包括:
41、至少一个处理器;以及,
42、与所述至少一个处理器通信连接的存储器;其中,
43、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的障碍物的检测方法。
44、为了实现上述目的,本发明还提供一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现上述的障碍物的检测方法。
45、本发明提供的技术方案,具有以下优点:
46、本发明通过获取目标位置对应的预存障碍物信息,所述预存障碍物信息至少包括预先存储的障碍物所占据的位置信息及障碍物类型,再根据预先存储的障碍物所占据的位置信息,获取所述目标位置的多帧当前图像数据,然后判断所述多帧当前图像数据中是否存在障碍物,最后根据判断出不存在障碍物的次数、以及预设的与障碍物类型对应的第一阈值,确定所述目标位置是否存在障碍物,如此可以基于障碍物的原位置信息对障碍物再次进行信息采集,并利用采集的多帧实时图像判断原障碍物位置处的障碍物是否存在变动,在基于原障碍物的障碍物类型所对应的识别失败次数阈值确定未能在原障碍物位置处识别到障碍物的情况下,可以确定原障碍物的位置确实存在较大的变动,在此情况下,可以对清洁路径或者清洁地图进行更新,从而有效降低障碍物位置变动和复杂环境对障碍物实时识别的影响,保证清洁设备的安全运行以及清洁效果。
- 还没有人留言评论。精彩留言会获得点赞!