待清洁对象的清扫方法及装置、存储介质及电子装置与流程
本发明涉及通信领域,具体而言,涉及一种待清洁对象的清扫方法及装置、存储介质及电子装置。
背景技术:
1、随着科技的发展,越来越多的人开始在日常生活中使用扫地机器人,其中,扫地机器人能够自主识别所在区域,以在不同区域执行清洁任务。
2、扫地机器人的使用,一方面给我们的生活带来诸多便利,而另一方面,自移动设备在使用的过程中,会存在不够智能问题。例如:
3、目前,扫地机器人对于识别出的污渍一般以直线往返的方式,对污渍进行局部清扫,由于边刷位于扫地机器人的侧边,因此,以直线往返的清洁方式可能会造成边刷被污染。
4、因此,针对相关技术中,扫地机器人对于识别出的污渍一般以直线往返的方式,对污渍进行局部清扫,进而导致边刷容易污渍被污染的问题,尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种待清洁对象的清扫方法及装置、存储介质及电子装置,以至少解决现有技术中,由于以至少解决现有技术中,扫地机器人对于识别出的污渍一般以直线往返的方式,对污渍进行局部清扫,进而导致边刷容易污渍被污染的问题。
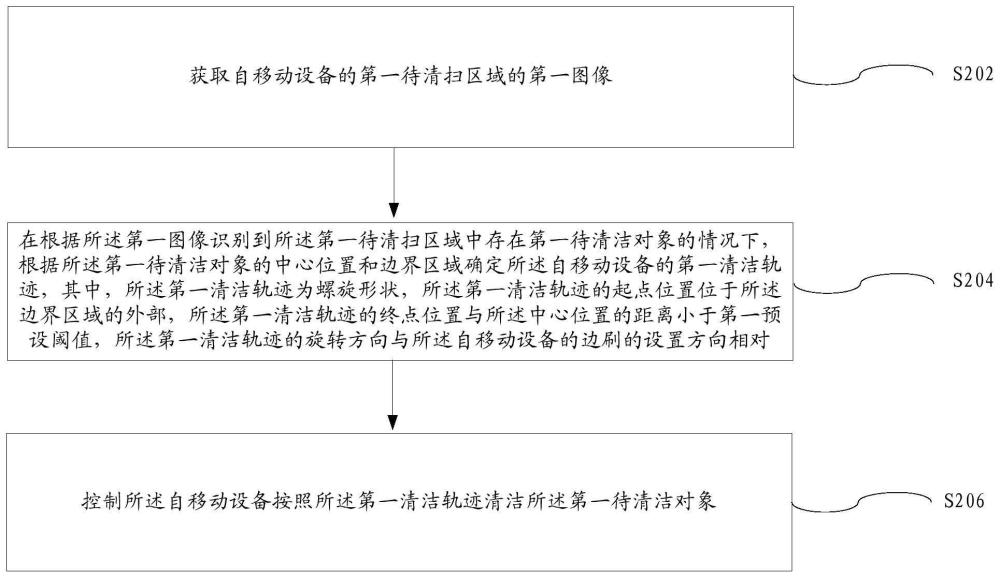
2、根据本发明实施例的一个实施例,提供了一种待清洁对象的清扫方法,包括:获取自移动设备的第一待清扫区域的第一图像;在根据所述第一图像识别到所述第一待清扫区域中存在第一待清洁对象的情况下,根据所述第一待清洁对象的中心位置和边界区域确定所述自移动设备的第一清洁轨迹,其中,所述第一清洁轨迹为螺旋形状,所述第一清洁轨迹的起点位置位于所述边界区域的外部,所述第一清洁轨迹的终点位置与所述中心位置的距离小于第一预设阈值,所述第一清洁轨迹的旋转方向与所述自移动设备的边刷的设置方向相对;控制所述自移动设备按照所述第一清洁轨迹清洁所述第一待清洁对象。
3、在一个示例性实施例中,根据所述第一待清洁对象的中心位置和边界区域确定所述自移动设备的第一清洁轨迹,包括:获取所述自移动设备的拖布盘的第一宽度;将所述螺旋形状的线条之间的宽度确定为第二宽度,其中,所述第二宽度小于所述第一宽度;根据所述起点位置,所述终点位置和所述第二宽度确定所述螺旋形状,以确定所述第一清洁轨迹。
4、在一个示例性实施例中,根据所述第一待清洁对象的中心位置和边界区域确定所述自移动设备的第一清洁轨迹,包括:确定所述第一清洁轨迹的旋转方向,其中,根据以下方式之一确定所述第一清洁轨迹的旋转方向:在所述边刷位于所述自移动设备的右上方的情况下,确定所述第一清洁轨迹的旋转方向为左旋方向;在所述边刷位于所述自移动设备的左上方的情况下,确定所述第一清洁轨迹的旋转方向为右旋方向;根据所述第一待清洁对象的中心位置、边界区域和所述旋转方向确定所述自移动设备的第一清洁轨迹。
5、在一个示例性实施例中,控制所述自移动设备按照所述第一清洁轨迹清洁所述第一待清洁对象,包括:控制所述自移动设备的拖布盘和边刷工作,以及控制所述自移动设备的主刷抬升;通过所述拖布盘和所述边刷清扫所述第一待清洁对象。
6、在一个示例性实施例中,获取自移动设备的第一待清扫区域的第一图像之后,所述方法还包括:在所述自移动设备的图像采集装置获取所述第一图像的情况下,控制所述自移动设备从第一位置移动至第二位置,其中,所述第一位置为所述图像采集装置采集所述第一图像时所述自移动设备的位置;获取所述自移动设备位于所述第二位置时所述图像采集装置采集的所述第一待清扫区域的第二图像;根据所述第二图像确定所述第一待清扫区域中是否存在所述第一待清洁对象;在根据所述第二图像确定所述第一待清扫区域中存在所述第一待清洁对象的情况下,确定所述第一待清扫区域存在所述第一待清洁对象。
7、在一个示例性实施例中,获取自移动设备的第一待清扫区域的第一图像之后,所述方法还包括:在第一设备的图像采集装置获取所述第一图像的情况下,向第二设备发送第一请求信息,其中,所述第一设备和所述第二设备为除所述自移动设备之外的设备,所述第一请求信息用于请求所述第二设备上的图像采集装置采集的所述第一待清扫区域的第三图像,并请求获取所述第三图像;接收所述第二设备基于所述第一请求信息发送的携带有所述第三图像的第一响应信息;根据所述第三图像确定所述第一待清扫区域中是否存在所述第一待清洁对象;在根据所述第三图像确定所述第一待清扫区域中存在所述第一待清洁对象的情况下,确定所述第一待清扫区域存在所述第一待清洁对象。
8、在一个示例性实施例中,控制所述自移动设备按照所述第一清洁轨迹清洁所述第一待清洁对象之后,所述方法还包括:在所述自移动设备的图像采集装置获取所述第一图像的情况下,控制所述自移动设备移动至第一位置,其中,所述第一位置为所述图像采集装置采集所述第一图像时所述自移动设备的位置;获取所述自移动设备位于所述第一位置时所述图像采集装置采集的所述第一待清扫区域的第四图像;根据所述第四图像确定所述第一待清扫区域中是否存在第二待清洁对象,其中,所述第二待清洁对象为所述第一待清洁对象的部分或全部;根据所述第一待清扫区域是否存在所述第二待清洁对象确定所述自移动设备的执行策略。
9、在一个示例性实施例中,控制所述自移动设备按照所述第一清洁轨迹清洁所述第一待清洁对象之后,所述方法还包括:在第一设备的图像采集装置获取所述第一图像的情况下,向所述第一设备发送第二请求信息,其中,所述第一设备为除所述自移动设备之外的设备,所述第二请求信息用于请求所述第一设备上的图像采集装置采集所述第一待清扫区域的第五图像,并请求获取所述第五图像;接收所述第一设备基于所述第二请求信息发送的携带有所述第五图像的第二响应信息;根据所述第五图像确定所述第一待清扫区域中是否存在第二待清洁对象,其中,所述第二待清洁对象为所述第一待清洁对象的部分或全部;根据所述第一待清扫区域是否存在所述第二待清洁对象确定所述自移动设备的执行策略。
10、在一个示例性实施例中,根据所述第一待清扫区域是否存在所述第二待清洁对象确定所述自移动设备的执行策略,包括:在所述第一待清扫区域存在所述第二待清洁对象的情况下,确定所述自移动设备清扫所述第一待清洁对象的清扫次数;在所述清扫次数小于等于第二预设阈值的情况下,根据所述第二待清洁对象的中心位置和所述第二待清洁对象的边界区域确定所述自移动设备的第二清洁轨迹,并控制所述自移动设备按照所述第二清洁轨迹清扫所述第二待清洁对象,其中,所述第二清洁轨迹为螺旋形状,所述第二清洁轨迹的起点位置位于所述第二待清洁对象的边界区域的外部,所述第二清洁轨迹的终点位置与所述第二待清洁对象的中心位置的距离小于第一预设阈值,所述第二清洁轨迹的旋转方向与所述自移动设备的边刷的设置方向相对;在所述第一待清扫区域不存在所述第二待清洁对象的情况下,控制所述自移动设备移动至所述自移动设备的清洁设备中,以使所述清洁设备清洗所述自移动设备的清洁组件,其中,所述清洁组件包括:拖布盘、主刷和边刷。
11、在一个示例性实施例中,确定所述自移动设备清扫所述第一待清洁对象的清扫次数之后,所述方法还包括:在所述清扫次数大于所述第二预设阈值的情况下,控制所述自移动设备移动至所述自移动设备的清洁设备中,以使所述清洁设备清洗所述自移动设备的清洁组件;在所述清洁设备清洗完成所述自移动设备的清洁组件的情况下,根据所述第二待清洁对象的中心位置和所述第二待清洁对象的边界区域确定所述自移动设备的第二清洁轨迹;控制所述自移动设备按照所述第二清洁轨迹清扫所述第二待清洁对象。
12、在一个示例性实施例中,根据所述第二待清洁对象的中心位置和所述第二待清洁对象的边界区域确定所述自移动设备的第二清洁轨迹,至少包括以下之一:获取所述自移动设备的拖布盘的第一宽度;将所述螺旋形状的线条之间的宽度确定为第二宽度,其中,所述第二宽度小于所述第一宽度;根据所述第二清洁轨迹的起点位置,所述第二清洁轨迹的终点位置和所述第二宽度确定所述螺旋形状,以确定所述第一清洁轨迹;确定所述第二待清洁对象的边界区域的区域大小和所述第一待清洁对象的边界区域的区域大小的比值;根据所述比值和所述第二待清洁对象的中心位置在所述第一清洁轨迹中确定所述第二清洁轨迹。
13、在一个示例性实施例中,确定所述第一待清扫区域存在所述第二待清洁对象之后,所述方法还包括:确定第二待清洁对象的形状;在所述第二待清洁对象为第一形状的情况下,根据所述第二待清洁对象的中心位置和所述第二待清洁对象的边界区域确定所述自移动设备的第二清洁轨迹,其中,所述第二清洁轨迹的螺旋形状的线条之间的宽度小于所述第一清洁轨迹的螺旋形状的线条之间的宽度;在所述第二待清洁对象为第二形状的情况下,将拖布盘的位置下调,以使所述拖布盘和地面的距离小于第三预设阈值。
14、在一个示例性实施例中,控制所述自移动设备按照所述第一清洁轨迹清洁所述第一待清洁对象之后,所述方法还包括:在所述自移动设备清扫完成所述第一待清洁对象的情况下,确定所述自移动设备执行清扫事件时的清扫模式,其中,执行所述清扫事件的时间早于清扫所述待清洁对象的时间,所述清扫模式包括以下之一:扫地模式,扫拖模式;控制所述自移动设备开启所述清扫模式,并通过所述清扫模式继续执行所述清扫事件。
15、在一个示例性实施例中,控制所述自移动设备按照所述第一清洁轨迹清洁所述第一待清洁对象之后,所述方法还包括:保存所述边界区域与所述中心位置的第一距离集合,以及与所述第一距离集合对应的第一清洁轨迹;获取自移动设备的第二待清扫区域的第六图像;在根据所述第六图像识别到所述第二待清扫区域中存在第三待清洁对象的情况下,确定所述第三待清洁对象的中心位置与所述第三待清洁对象的边界区域的第二距离集合;在所述第二距离集合与所述第一距离集合的匹配度大于第四预设阈值的情况下,确定所述自移动设备的清洁轨迹为所述第一清洁轨迹。
16、根据本发明实施例的另一方面,还提供了一种待清洁对象的清扫装置,包括:获取模块,用于获取自移动设备的第一待清扫区域的第一图像;确定模块,用于在根据所述第一图像识别到所述第一待清扫区域中存在第一待清洁对象的情况下,根据所述第一待清洁对象的中心位置和边界区域确定所述自移动设备的第一清洁轨迹,其中,所述第一清洁轨迹为螺旋形状,所述第一清洁轨迹的起点位置位于所述边界区域的外部,所述第一清洁轨迹的终点位置与所述中心位置的距离小于第一预设阈值,所述第一清洁轨迹的旋转方向与所述自移动设备的边刷的设置方向相对;控制模块,用于控制所述自移动设备按照所述第一清洁轨迹清洁所述第一待清洁对象。
17、根据本发明实施例的又一方面,还提供了一种电子装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,上述处理器通过计算机程序执行上述任一项中所述的待清洁对象的清扫方法。
18、通过本发明,获取自移动设备的第一待清扫区域的第一图像;在根据所述第一图像识别到所述第一待清扫区域中存在第一待清洁对象的情况下,根据所述第一待清洁对象的中心位置和边界区域确定所述自移动设备的第一清洁轨迹,其中,所述第一清洁轨迹为螺旋形状,所述第一清洁轨迹的起点位置位于所述边界区域的外部,所述第一清洁轨迹的终点位置与所述中心位置的距离小于第一预设阈值,所述第一清洁轨迹的旋转方向与所述自移动设备的边刷的设置方向相对;控制所述自移动设备按照所述第一清洁轨迹清洁所述第一待清洁对象;即自移动设备能够通过与所述自移动设备的边刷的设置方向相对的螺旋形状的清洁轨迹清洁待清洁对象,采用上述技术方案,解决了现有技术中,扫地机器人对于识别出的污渍一般以直线往返的方式,对污渍进行局部清扫,进而导致边刷容易污渍被污染的问题。
- 还没有人留言评论。精彩留言会获得点赞!