一种便于更换抹布的扫地机器人的制作方法
1.本技术涉及清洁技术领域,具体是涉及一种便于更换抹布的扫地机器人。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。
3.现有的扫地机器人在吸尘口的前方则设有由电机驱动的连续旋转的起尘刷,起尘刷上的刷毛在旋转过程中,对吸尘口前方地面进行连续清扫,使附着于地面的尘屑扬起,从而易于被吸尘口吸取。然而,由于地面环境通常较为复杂,例如地面有液体,又例如灰尘清理不干净等,因此在现有技术中,也出现了具有拖地功能的扫地机器人,但由于抹布在扫地机器人的底面,不便于自动更换或人工更换。
技术实现要素:
4.本发明主要针对以上问题,提出了一种便于更换抹布的扫地机器人,其目的是实现能使抹布快速更换。
5.为实现上述目的,本发明提供了一种便于更换抹布的扫地机器人,包括:壳体,所述壳体底面开设有吸尘口;行走机构,安装于所述壳体的底面;起尘部件,设置于所述壳体的底面;驱动组件,分别与所述行走机构及所述起尘部件传动连接;所述扫地机器人还包括拖地组件,所述拖地组件包括:用于安装抹布的抹布安装件、用于与所述抹布安装件组合成整体的机壳、以及用于在接收到下压和旋转作用力时能将所述抹布安装件从所述机壳分离、且使所述抹布安装件从所述壳体底面移出的控制部件;所述机壳固定在所述壳体上。
6.进一步地,所述控制部件包括与所述抹布安装件固定连接的转轴,所述转轴上端开口,且所述开口设置有与所述转轴组合成伸缩结构的导杆,所述导杆轴壁具有台阶挡块,所述导杆在所述台阶挡块与所述转轴端面之间的轴壁位置套设有弹簧,所述导杆上端的轴壁上设置有防转块,所述壳体设置有容所述导杆部分伸出的槽口,所述槽口内设置与所述防转块配合的防转槽,所述弹簧具有顶推所述导杆的弹性力,使所述防转块伸入所述防转槽。
7.进一步地,所述导杆上端的端面开设有驱动槽,所述驱动槽内设置有致动块。
8.进一步地,所述抹布安装件具有收容所述抹布的台阶口,所述台阶口中部贯通容部分抹布伸出的开口。
9.进一步地,所述机壳具有与所述抹布安装件配合的接触面,所述接触面沿长度方向设置有蒸汽导流槽,所述扫地机器人还包括蒸汽发生器,所述蒸汽发生器用于释放蒸汽,所述蒸汽发生器与所述机壳之间通过蒸汽管连通,其中,所述蒸汽管的一端与所述蒸汽发生器的蒸汽出口相连,另一端与所述蒸汽导流槽相连。
10.进一步地,所述蒸汽导流槽内正对所述蒸汽管进气方向设置有v型导流部。
11.进一步地,所述行走机构包括行走轮部件和转向轮部件。
12.进一步地,所述扫地机器人还包括吸尘部件,所述吸尘部件包括设于所述吸尘口内的滚刷以及设于所述壳体内的吸尘电机和集尘仓。
13.进一步地,所述吸尘口外安装有防护罩。
14.进一步地,所述致动块为一字型结构。
15.与现有技术相比,本发明提供的一种便于更换抹布的扫地机器人,具有如下有益效果:可直接对扫地机器人的上端面操作即可将拖地组件从扫地机器人的底面移出,从而解决了现有技术中更换抹布难度较大、结构复杂、成本高的问题。
附图说明
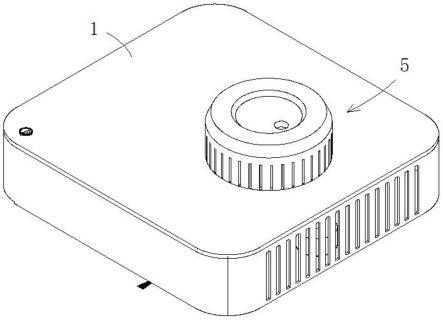
16.图1为本技术披露的一种便于更换抹布的扫地机器人正面立体结构。
17.图2为本技术披露的一种便于更换抹布的扫地机器人底面立体结构。
18.图3为本技术披露的一种拖地组件部分移出的立体结构。
19.图4为本技术披露的一种拖地组件与蒸汽发生器连接的立体结构。
20.图5为本技术披露的一种控制部件的立体结构。
21.图6为图5中a处的局部放大结构示意图。
22.图7为本技术披露的一种机壳的立体结构。
23.图中所示的附图标记:
24.1、壳体;101、吸尘口;102、防转槽;
25.2、行走机构;20、行走轮部件;21、转向轮部件;
26.3、起尘部件;
27.4、拖地组件;40、抹布;41、抹布安装件;42、机壳;43、控制部件;410、台阶口;411、开口;420、接触面;421、蒸汽导流槽;422、v型导流部;423、磁铁;430、转轴;431、导杆;432、台阶挡块;433、弹簧;434、防转块;435、驱动槽;436、致动块;437、键槽;
28.5、蒸汽发生器;50、蒸汽管;
29.6、吸尘部件;60、滚刷;61、防护罩。
具体实施方式
30.下面将结合附图对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
32.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具
体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
33.下面将本技术披露的一种便于更换抹布的扫地机器人为例来描述本公开的技术方案。
34.根据本公开的示例,由图1-图7所示便于更换抹布的扫地机器人的立体图可知,该扫地机器人包括壳体1,所述壳体1底面开设有吸尘口101;行走机构2,安装于所述壳体1的底面;起尘部件3,设置于所述壳体1的底面;驱动组件,分别与所述行走机构2及所述起尘部件3传动连接,其中,行走机构2包括行走轮部件20和转向轮部件21,用于驱动壳体1行走,行走机构2的前方可通过设置感应器,用以侦测障碍物,如碰到墙壁或其他障碍物,由转向轮部件21实现转弯,在本实施例中,行走机构2可包含除行走轮部件20和转向轮部件21更多的部件,也可省略某些部件,并申请并不对其进行限制。
35.在上述实施例中,位于底面的起尘部件3用于对灰尘进行清扫,使附着于地面的尘屑扬起,从而易于被吸尘口101吸取。
36.如图3、图4所示,所述扫地机器人还包括拖地组件4,所述拖地组件4包括:用于安装抹布40的抹布安装件41、用于与所述抹布安装件41组合成整体的机壳42、以及用于在接收到下压和旋转作用力时能将所述抹布安装件41从所述机壳42分离、且使所述抹布安装件41从所述壳体1底面移出的控制部件43;所述机壳42固定在所述壳体1上。
37.具体地,当需要对扫地机器人的抹布40进行更换时,操作人员或抹布更换装置可通过在扫地机器人的上侧对控制部件43施加下压力和旋转力,其中,下压力用于解除防旋转的锁定状态,旋转力用于驱动抹布安装件41转动,将抹布40和抹布安装件41从扫地机器人的底面移出,由操作人员或更换抹布的装置取出已用抹布40,装入干净抹布40,其操作、结构简单,解决了现有技术中更换抹布40难度较大、结构复杂、成本高的问题。
38.下面将结合具体示例来对控制部件43的组成和连接关系进行详细说明。
39.如图5、图6所示,控制部件43包括与抹布安装件41固定连接的转轴430,所述转轴430上端开口,且所述开口设置有与所述转轴430组合成伸缩结构的导杆431,所述导杆431轴壁具有台阶挡块432,所述导杆431在所述台阶挡块432与所述转轴430端面之间的轴壁位置套设有弹簧433,所述导杆431上端的轴壁上设置有防转块434,所述壳体1设置有容所述导杆431部分伸出的槽口,所述槽口内设置与所述防转块434配合的防转槽102,所述弹簧433具有顶推所述导杆431的弹性力,使所述防转块434伸入所述防转槽102。
40.具体地,在锁死状态下,弹簧433的弹力将防转块434顶入防转槽102,当进行拖地时,由于处于锁死状态,地面对抹布的摩擦力无法将抹布安装件41和抹布40展开,在更换阶段,通过对导杆431施加向下的顶推力,使防转块434脱离防转槽102,此时导杆431处于可旋转状态,通过驱动导杆431即可带动转轴430、抹布安装件41和抹布旋转,将抹布安装件41和抹布40展开,进而方便对抹布40的更换操作。
41.需要说明的是,导杆431与转轴430之间通过键槽437连接,可进行上下伸缩,旋转时为同步旋转;抹布安装件41与机壳42之间通过磁铁423吸附而贴合,其磁铁423的吸附力大于弹簧433对抹布安装件41的推力。
42.在上述实施例中,为了更好的对导杆431进行旋转,在所述导杆431上端的端面开设驱动槽435,所述驱动槽435内设置有致动块436,于本发明对致动块436的至少一个例子,
该致动块436可为一字型结构、十字型结构、多边形结构等。
43.如图3、图4所示,抹布安装件41具有收容所述抹布40的台阶口410,所述台阶口410中部贯通容部分抹布40伸出的开口411,放置时,抹布40的两侧边缘搭放在台阶口410,与地面接触的部位伸出该开口411,通过该结构的设计,可更方便放置和固定抹布40。
44.请继续参照图4、图7,所述机壳42具有与所述抹布安装件41配合的接触面420,所述接触面420沿长度方向设置有蒸汽导流槽421,所述扫地机器人还包括蒸汽发生器5,所述蒸汽发生器5用于释放蒸汽,所述蒸汽发生器5与所述机壳42之间通过蒸汽管50连通,其中,所述蒸汽管50的一端与所述蒸汽发生器5的蒸汽出口相连,另一端与所述蒸汽导流槽421相连。
45.具体地,该蒸汽发生器5可通过注液口,向其注入液体,在蒸汽发生器5的作用下,液体被汽化成高温蒸汽,高温蒸汽经蒸汽管50进入蒸汽导流槽421,在拖地时,高温蒸汽经抹布40或在抹布40的带动下流向地面,达到高温润湿地面,清扫顽固污渍、消毒杀菌的目的。
46.在一些实施例中,蒸汽导流槽421内正对所述蒸汽管50进气方向设置有v型导流部422,由该v型导流部422对刚进入的气流进行分流,充分接触抹布40。
47.如图2所示,扫地机器人还包括吸尘部件6,所述吸尘部件6包括设于所述吸尘口101内的滚刷60以及设于所述壳体1内的吸尘电机和集尘仓(未图示),吸尘电机驱动叶轮在集尘仓中形成负压,吸取被卷起的灰尘,滚刷60用于将灰尘和颗粒带入集尘仓。
48.在一些实施例中,吸尘口101外安装有防护罩61,用以阻挡地毯、毛毯等不属于垃圾的物体吸入。
49.通过上述具体实施方式的阅读理解,所属技术领域的技术人员可容易地实现本发明。但是应当理解,本发明不限于这种具体实施方式。在所公开实施方式的基础上,所述基础领域的技术人员可任意组合不同的技术特征,从而实现不同的技术方案,其上也可与不同形式的附加功能结合而形成其他技术方案。因此,本技术的保护范围仅由所附权利要求的范围来限定。
50.以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1