一种擦玻璃机器人自动复位方法及擦玻璃机器人与流程
本发明涉及智能清洁设备领域,具体而言,涉及一种擦玻璃机器人自动复位方法及擦玻璃机器人。
背景技术:
1、随着自动化控制技术和计算机技术的飞速发展,机器人智能化技术越来越成熟,开始逐渐由工业型机器人向服务型机器人领域迈进。人工清洁高层建筑外墙的玻璃不仅效率低、劳动强度大,而且伴有危险性。为此,市场上出现了擦玻璃机器人,以此来提高擦玻璃的效率和安全性。
2、擦玻璃机器人一般由人工放置在起始位置后,根据预设的清洁程序对工作范围进行清洁,其中起始位置通常为较容易接触的位置,例如玻璃较低的一端或靠近窗户的一端,现有的擦玻璃机器人在清洁完成后,往往会直接停止,其停止的位置不确定,有可能停在远离起始位置的一端,使用者难以触及,造成擦玻璃机器人难以回收或无法回收的尴尬情况,若用在清洁高层玻璃,还会增加回收时的危险性。
技术实现思路
1、本发明的目的在于提供一种擦玻璃机器人自动复位方法及擦玻璃机器人,能够自动返回工作范围靠近起始位置的一侧,方便擦玻璃机器人的回收。
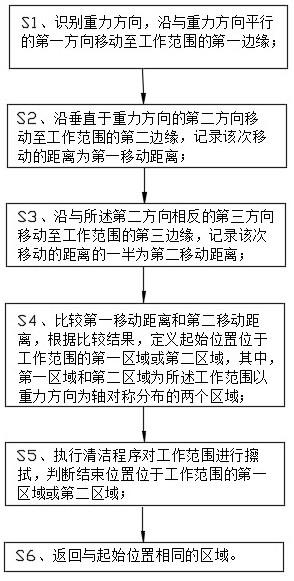
2、一种擦玻璃机器人自动复位方法,包括:s1、识别重力方向,沿与重力方向平行的第一方向移动至工作范围的第一边缘;s2、沿垂直于重力方向的第二方向移动至工作范围的第二边缘,记录该次移动的距离为第一移动距离;s3、沿与所述第二方向相反的第三方向移动至工作范围的第三边缘,记录该次移动的距离的一半为第二移动距离;s4、比较第一移动距离和第二移动距离,根据比较结果,定义起始位置位于工作范围的第一区域或第二区域,其中,第一区域和第二区域为所述工作范围以重力方向为轴对称分布的两个区域;s5、执行清洁程序对工作范围进行擦拭,判断结束位置位于工作范围的第一区域或第二区域;s6、返回与起始位置相同的区域。
3、进一步的,所述步骤s4具体包括:若第一移动距离大于第二移动距离,则起始位置所在的区域为第一区域;若第一移动距离小于第二移动距离,则起始位置所在的区域为第二区域。
4、进一步的,所述步骤s6具体包括:若结束位置所在区域与起始位置所在区域相同,则保持原位;若结束位置所在区域与起始位置所在区域相反,则沿第二方向或第三方向移动至另一区域。
5、进一步的,所述步骤s5中的清洁程序具体包括:s51、沿第二方向移动至第二边缘;s52、沿与所述第一方向相反的第四方向移动单位距离;s53、沿第三方向移动至第三边缘;s54、沿第四方向移动单位距离;s55、重复步骤s51至步骤s54。
6、进一步的,所述步骤s5还包括:记录移动次数,根据所述移动次数判断结束位置在所述工作范围的区域。
7、进一步的,所述根据所述移动次数判断结束位置在所述工作范围的区域包括:所述移动次数为沿第四方向移动单位距离的次数,若所述移动次数为单数,则结束位置所在区域与起始位置所在区域相同;若所述移动次数为双数,则结束位置所在区域与起始位置所在区域相反。
8、进一步的,所述第二边缘与第三边缘平行相对。
9、进一步的,所述步骤s1中,通过重力传感器识别重力方向。
10、进一步的,所述第一方向与所述重力方向相同或相反。
11、一种擦玻璃机器人,采用如上述的自动复位方法。
12、与现有技术相比,本发明的有益效果是:本申请实施例提供的擦玻璃机器人自动复位方法能够在启动后根据预设的路径移动,通过移动时获取的数据,判断起始位置在工作范围内的所在区域,并在清洁结束后判断结束位置所在区域,通过对比起始位置和结束位置的所在区域进行复位,自动移动至工作范围中靠近起始位置的一侧,方便使用者对机器人进行回收,有效提高使用体验,同时降低了回收机器人的难度和危险。
技术特征:
1.一种擦玻璃机器人自动复位方法,其特征在于,包括:
2.根据权利要求1所述的擦玻璃机器人自动复位方法,其特征在于,所述步骤s4具体包括:
3.根据权利要求1所述的擦玻璃机器人自动复位方法,其特征在于,所述步骤s6具体包括:
4.根据权利要求1所述的擦玻璃机器人自动复位方法,其特征在于,所述步骤s5中的清洁程序具体包括:
5.根据权利要求4所述的擦玻璃机器人自动复位方法,其特征在于,所述步骤s5还包括:
6.根据权利要求5所述的擦玻璃机器人自动复位方法,其特征在于,所述根据所述移动次数判断结束位置在所述工作范围的区域包括:
7.根据权利要求1所述的擦玻璃机器人自动复位方法,其特征在于,所述第二边缘与第三边缘平行相对。
8.根据权利要求1所述的擦玻璃机器人自动复位方法,其特征在于,所述步骤s1中,通过重力传感器识别重力方向。
9.根据权利要求1所述的擦玻璃机器人自动复位方法,其特征在于,所述第一方向与所述重力方向相同或相反。
10.一种擦玻璃机器人,其特征在于,采用如权利要求1至9中任一项所述的自动复位方法。
技术总结
本发明涉及一种擦玻璃机器人自动复位方法及擦玻璃机器人,其中自动复位方法包括:S1、识别重力方向,沿与重力方向平行的第一方向移动至工作范围的第一边缘;S2、沿垂第二方向移动至工作范围的第二边缘,记录该次移动的距离为第一移动距离;S3、沿第三方向移动至工作范围的第三边缘,记录该次移动的距离的一半为第二移动距离;S4、比较第一移动距离和第二移动距离,定义起始位置位于工作范围的第一区域或第二区域;S5、执行清洁程序对工作范围进行擦拭,判断结束位置位于工作范围的第一区域或第二区域;S6、返回与起始位置相同的区域。本发明的能够在清洁完成后自动返回工作范围中靠近起始位置的一侧,方便机器人的回收。
技术研发人员:彭云,谢聪
受保护的技术使用者:惠州莫思特电子有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!