机器人异常处理方法、装置、机器人及介质与流程
本发明涉及机器人,尤其涉及一种机器人异常处理方法、装置、机器人及介质。
背景技术:
1、机器人(比如扫地机器人等),是智能家用电器的一种,能凭借一定的人工智能,自动在室内和室外完成地板清理工作。现有技术中,当扫地机器人在复杂的清扫环境中执行清扫任务时,容易出现清扫任务执行失败的情况。现有技术中,在扫地机器人清扫任务执行失败时,往往处于原地待机状态,由于无法判断清扫失败原因,往往需要通过人工前往处理;而通过人工前往处理容易造成人工资源的过度耗费,同时也会降低扫地机器人的使用便捷性。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种机器人异常处理方法、装置、机器人及介质,以解决人工资源的过度耗费和扫地机器人使用便捷性的降低等问题。
2、一种机器人异常处理方法,包括:
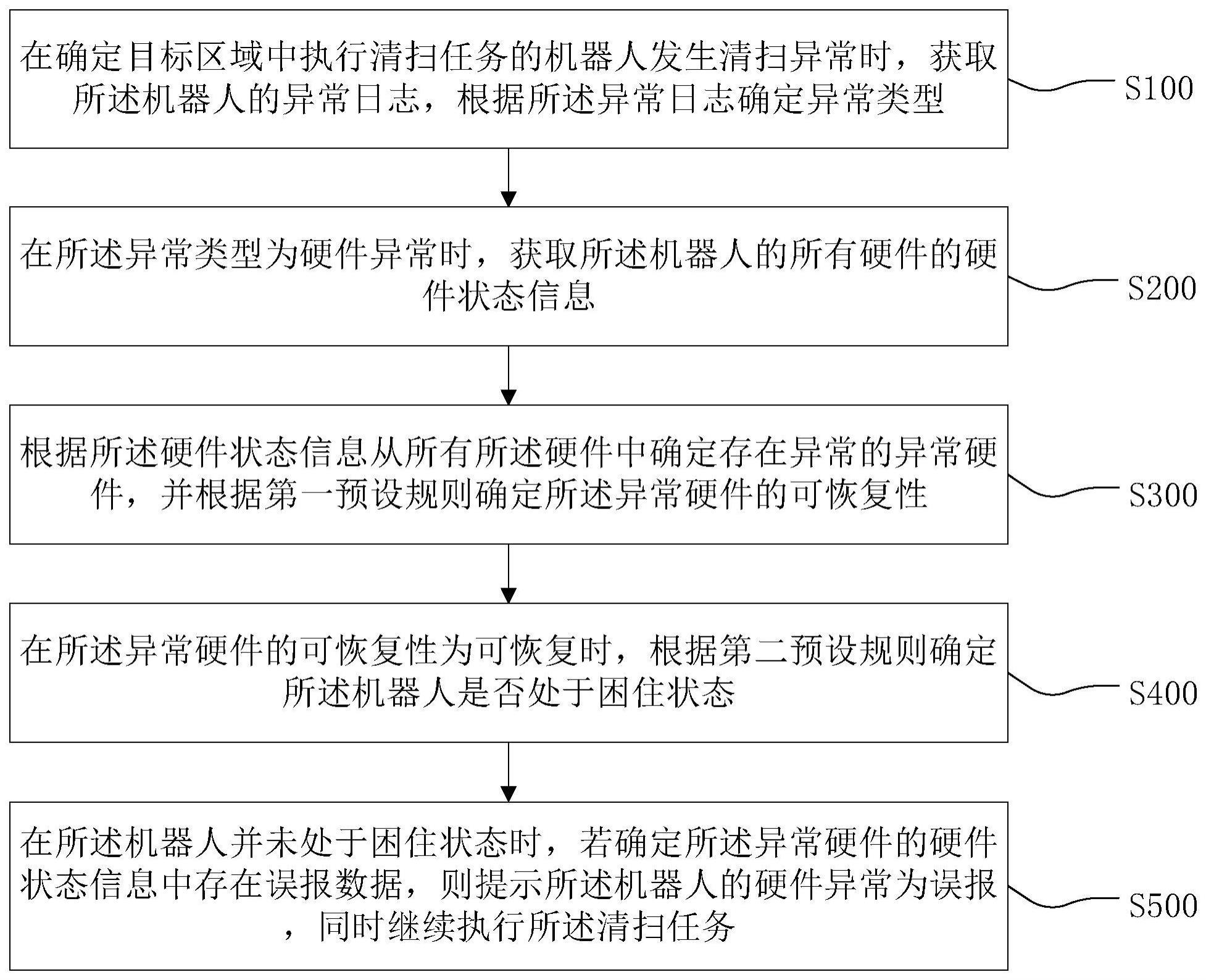
3、在确定目标区域中执行清扫任务的机器人发生清扫异常时,获取所述机器人的异常日志,根据所述异常日志确定异常类型;
4、在所述异常类型为硬件异常时,获取所述机器人的所有硬件的硬件状态信息;
5、根据所述硬件状态信息从所有所述硬件中确定存在异常的异常硬件,并根据第一预设规则确定所述异常硬件的可恢复性;
6、在所述异常硬件的可恢复性为可恢复时,根据第二预设规则确定所述机器人是否处于困住状态;
7、在所述机器人并未处于困住状态时,若确定所述异常硬件的硬件状态信息中存在误报数据,则提示所述机器人的硬件异常为误报,同时继续执行所述清扫任务。
8、一种异常处理装置,包括:
9、第一确定模块,用于在确定目标区域中执行清扫任务的机器人发生清扫异常时,获取所述机器人的异常日志,根据所述异常日志确定异常类型;
10、获取模块,用于在所述异常类型为硬件异常时,获取所述机器人的所有硬件的硬件状态信息;
11、第二确定模块,用于根据所述硬件状态信息从所有所述硬件中确定存在异常的异常硬件,并根据第一预设规则确定所述异常硬件的可恢复性;
12、第三确定模块,用于在所述异常硬件的可恢复性为可恢复时,根据第二预设规则确定所述机器人是否处于困住状态;
13、处理模块,用于在所述机器人并未处于困住状态时,若确定所述异常硬件的硬件状态信息中存在误报数据,则提示所述机器人的硬件异常为误报,同时继续执行所述清扫任务。
14、一种机器人,包括控制模块,所述控制模块用于执行上述机器人异常处理方法的步骤。
15、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现上述机器人异常处理方法的步骤。
16、本发明中,在机器人发生清扫异常时,通过异常日志和硬件状态信息确定异常类型为硬件异常时;此时,再确认硬件异常可恢复且所述机器人并未处于困住状态时,若确定所述异常硬件的硬件状态信息中存在误报数据,则提示所述机器人的硬件异常为误报,同时控制器机器人继续执行所述清扫任务。本发明中,在通过对机器人的异常日志和硬件状态信息等进行分析之后,可以明确清扫失败原因,且在失败原因明确的基础上,并不一定需要人工前往处理,且机器人并不需要人工排查即可重新执行清扫任务,如此,减少了人工资源的过度耗费,同时也提高了扫地机器人的使用便捷性。
技术特征:
1.一种机器人异常处理方法,其特征在于,所述方法包括:
2.如权利要求1所述的机器人异常处理方法,其特征在于,所述根据所述异常日志确定异常类型之后,还包括:
3.如权利要求1所述的机器人异常处理方法,其特征在于,所述根据第一预设规则确定所述异常硬件的可恢复性之后,还包括:
4.如权利要求1所述的机器人异常处理方法,其特征在于,所述根据第二预设规则确定所述机器人是否处于困住状态之后,还包括:
5.如权利要求1所述的机器人异常处理方法,其特征在于,所述根据第一预设规则确定所述异常硬件的可恢复性,包括:
6.如权利要求1所述的机器人异常处理方法,其特征在于,所述根据第二预设规则确定所述机器人是否处于困住状态,包括:
7.如权利要求1所述的机器人异常处理方法,其特征在于,所述获取所述机器人的异常日志,根据所述异常日志确定异常类型,包括:
8.一种异常处理装置,其特征在于,包括:
9.一种机器人,其特征在于,包括控制模块,所述控制模块用于执行如权利要求1至7任一项所述的机器人异常处理方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的机器人异常处理方法的步骤。
技术总结
本发明公开了一种机器人异常处理方法、装置、机器人及介质,所述方法包括:在确定目标区域中执行清扫任务的机器人发生清扫异常时,获取机器人的异常日志,根据异常日志确定异常类型;在异常类型为硬件异常时,获取机器人的所有硬件的硬件状态信息;根据硬件状态信息从所有硬件中确定存在异常的异常硬件,并根据第一预设规则确定异常硬件的可恢复性;在异常硬件的可恢复性为可恢复时,根据第二预设规则确定机器人是否处于困住状态;在机器人并未处于困住状态时,若确定异常硬件的硬件状态信息中存在误报数据,则提示机器人的硬件异常为误报,同时继续执行清扫任务。本发明减少了人工资源的过度耗费,提高了扫地机器人的使用便捷性。
技术研发人员:伍仁华,王为举,赵传涛
受保护的技术使用者:深圳市普森斯科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!