一种搅拌头以及炒菜机的制作方法
1.实用新型属于烹饪技术领域,尤其涉及一种搅拌头以及炒菜机。
背景技术:
2.炒菜机是可以实现自动化烹饪搅拌食材的智能设备,炒菜机具有对食材进行搅拌的搅拌机构,搅拌机构包括对食材进行翻炒以使食材均匀受热的搅拌刀。现有的搅拌机,通过驱动件驱动行星齿轮结构带动搅拌刀自转以及公转而实现翻炒,而行星齿轮结构包括行星架、内啮合于行星架内的若干行星轮以及位于若干行星轮中心并与行星轮啮合的中心齿轮,由于行星齿轮结构的中部设有定轴的中心齿轮与行星轮啮合,因此,此种结构使得行星齿轮的直径受限于行星架,即,行星齿轮的最大直径无法达到行星架的二分之一甚至更大,这导致行星轮的公转比以及自转比的受限于行星架,只能在一定范围区间内进行调节。而运动轨迹由搅拌刀上的拌刀划过锅面的最远点与锅体投影面圆心连线作为辅助线,每个周期的辅助线与相邻周期的辅助线形成一个夹角(参见图8~图11 任一附图),现有行星轮的内径相对行星架内径较小,则运动轨迹产生的夹角较小,运动轨迹以螺旋状的姿态绕锅具四周周向移动,使得在翻炒时只能对锅具的一部分区域翻炒,另一部分区域仍处于堆积状态以待翻炒,此种运动轨迹适用烹饪食谱有限,不能满足用户的不同食谱烹饪需求。
技术实现要素:
3.实用新型提供的搅拌头,旨在解决现有技术中由于搅拌刀公转和自转的结构使得搅拌刀的搅动轨迹调节有限,无法适应多种食品烹饪需求导致烹饪效果不理想的问题。
4.实用新型是这样实现的,一种搅拌头,包括:
5.安装座;
6.驱动组件,设于所述安装座;
7.第一齿轮,设于所述安装座并与所述驱动组件连接由所述驱动组件驱动转动;
8.第二齿轮,设于所述安装座并与所述第一齿轮啮合传动;
9.上齿圈,可转动的设于所述安装座并且套设于所述第一齿轮外,所述第一齿轮内啮合于所述上齿圈;
10.转动盘,套设于所述上齿圈外并固定;
11.下齿圈,设于所述上齿圈的下方并且可转动地固定于所述转动盘,所述第二齿轮延伸至所述下齿圈并且内啮合于所述下齿圈;
12.行星轮,固设于所述转动盘并且内啮合于所述下齿圈,所述行星轮用于固定搅拌刀。
13.进一步地,所述上齿圈的转速范围为3~90rpm,所述行星轮的转速范围为 3~270rpm。
14.进一步地,所述搅拌刀的自转公转比为1.2~30。
15.进一步地,所述搅拌刀的自转公转比为1.25~5。
16.进一步地,所述搅拌刀包括相对设置的两个拌刀,设单个所述拌刀由起点移动至其轨迹相交时轨迹围成的区域为一个花瓣周期,一个花瓣周期的辅助线与相邻的另一个花瓣周期的辅助线形成一个夹角x,所述夹角x的范围为30~330 度。
17.进一步地,所述夹角x的范围为72度~288度。
18.进一步地,设所述搅拌刀的自转中心延长线与其自转中心和锅口平面中心点连线的夹角为y,所述夹角y与锅体半径的正切值的乘积等于两个所述拌刀间距的二分之一。
19.进一步地,所述驱动组件包括:
20.驱动件,设于所述安装座;
21.传动组件,设于所述安装座并由所述驱动件驱动转动;
22.驱动齿轮,设于所述安装座与所述传动组件配合传动,所述第一齿轮与所述驱动齿轮啮合。
23.进一步地,所述上齿圈的内径大于所述下齿圈的内径。
24.进一步地,所述转动盘包括与所述上齿圈固定的上盘体以及连接于所述上盘体下方并套设在所述下齿圈外的下盘体,所述行星轮固定在所述下盘体上。
25.进一步地,所述下盘体包括延伸至所述下齿圈下方的固定部,所述行星轮固定于所述固定部。
26.进一步地,所述搅拌头还包括轴承,所述轴承的外圈固定于所述下盘体内,所述下齿圈与所述轴承的内圈固定。
27.进一步地,所述安装座包括第一安装部以及自所述第一安装部向下延伸的第二安装部,所述驱动组件、第一齿轮、第二齿轮固定于所述第一安装部,所述转动盘可转动地固定于所述第二安装部。
28.进一步地,所述第二安装部和所述转动盘之间设有回转体,所述第二安装部通过所述回转体与所述转动盘连接。
29.实用新型还提供了一种炒菜机,包括:
30.机体;
31.锅具,设于所述机体上;以及
32.前述的搅拌头,所述搅拌头的安装座固定在机体上,所述搅拌头位于所述锅具的上方,所述转动盘上固定有第一搅拌刀,所述行星轮固定有第二搅拌刀,所述第一搅拌刀、所述第二搅拌刀延伸至所述锅具内以对食材进行搅拌。
33.本实用新型所达到的有益效果为,通过将驱动组件的动力输送至第一齿轮,并由第一齿轮分别带动上齿圈以及第二齿轮转动,进而分别使上齿圈带动转动盘、第二齿轮带动下齿圈转动,而行星轮固定在转动盘上并与下齿圈啮合,可以利用转动盘运动时带动行星轮进行公转运动,下齿圈带动行星轮自转,采用此种结构,下齿圈只需与一个行星轮啮合带动行星轮自转即可,行星轮的直径可调范围极大,能够在小于或者等于下齿圈直径二分之一区域内调节,也能够在大于下齿圈直径二分之一以上的区域内进行调节,行星轮的自转比可调节区域广,设置在行星轮上的搅拌刀运动轨迹能够在疏松到密集之间变化,从而能够适应不同食材的烹饪,烹饪效果更加理想,更能适应市场需求;此外,动力输入至第一齿轮,第一齿轮内啮合上齿圈以及同时将动力输送至第二齿轮后再由第二齿轮内啮合下齿圈,本技术采用小齿轮带大齿轮的结构,相比现有技术的行星齿轮结构采用动力输出直接
驱动行星轮自转以及公转,本技术能够输出大力矩,同时用力更小、功耗小,对驱动组件要求低,从而能够动力降低成本。
附图说明
34.图1是实用新型提供的一种搅拌头的立体图;
35.图2是图1中a~a处的截面图;
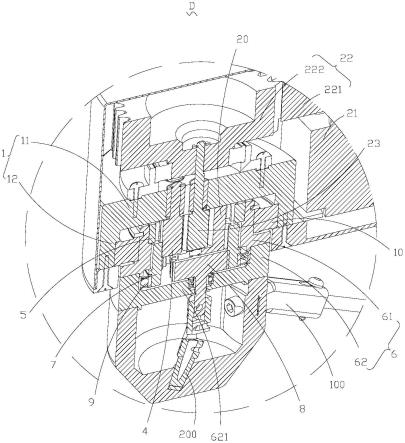
36.图3是图2中d处的放大图;
37.图4是图1中b~b处的截面图;
38.图5是图4中e处的放大图;
39.图6是图1中c~c处的截面图;
40.图7是图6中f处的放大图;
41.图8是实用新型提供的一种搅拌头的一种实施方式的单轨迹示意图;
42.图9是实用新型提供的一种搅拌头的一种实施方式的双轨迹示意图;
43.图10是实用新型提供的一种搅拌头的另一种实施方式的单轨迹示意图;
44.图11是实用新型提供的一种搅拌头的另一种实施方式的双轨迹示意图。
具体实施方式
45.为了使实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释实用新型,并不用于限定实用新型。
46.实用新型通过将驱动组件的动力输送至第一齿轮,并由第一齿轮分别带动上齿圈以及第二齿轮转动,进而分别使上齿圈带动转动盘、第二齿轮带动下齿圈转动,而行星轮固定在转动盘上并与下齿圈啮合,可以利用转动盘运动时带动行星轮进行公转运动,下齿圈带动行星轮自转,采用此种结构,下齿圈只需与一个行星轮啮合带动行星轮自转即可,行星轮的直径可调范围极大,能够在小于或者等于下齿圈直径二分之一区域内调节,也能够在大于下齿圈直径二分之一以上的区域内进行调节,行星轮的自转比可调节区域广,设置在行星轮上的搅拌刀运动轨迹能够在疏松到密集之间变化,从而能够适应不同食材的烹饪,烹饪效果更加理想,更能适应市场需求;此外,动力输入至第一齿轮,第一齿轮内啮合上齿圈以及同时将动力输送至第二齿轮后再由第二齿轮内啮合下齿圈,本技术采用小齿轮带大齿轮的结构,相比现有技术的行星齿轮结构采用动力输出直接驱动行星轮自转以及公转,本技术能够输出大力矩,同时用力更小、功耗小,对驱动组件要求低,从而能够动力降低成本。
47.实施例一
48.参见图1~图7,实用新型实施例提供了一种搅拌头100,包括安装座1、驱动组件2、第一齿轮3、第二齿轮4、上齿圈5、转动盘6、下齿圈7以及行星轮8。其中,驱动组件2设于安装座1,第一齿轮3设于安装座1并与驱动组件 2连接由驱动组件2驱动转动,第二齿轮4设于安装座1并与第一齿轮3啮合传动,上齿圈5可转动的设于安装座1并且套设于第一齿轮3外,第一齿轮3 内啮合于上齿圈5,转动盘6套设于上齿圈5外并且固定,下齿圈7设于所述上齿圈5的下方并且可转动地固定于所述转动盘6,第二齿轮4延伸至下齿圈7 并且内啮合于下齿圈
7,行星轮8固设于转动盘6并且内啮合于下齿圈7,行星轮8用于固定搅拌刀。
49.通过将驱动组件2的动力输送至第一齿轮3,并由第一齿轮3分别带动上齿圈5以及第二齿轮4转动,进而分别使上齿圈5带动转动盘6、第二齿轮4 带动下齿圈7转动,而行星轮8固定在转动盘6上并与下齿圈7啮合,可以利用转动盘6运动时带动行星轮8进行公转运动,下齿圈7带动行星轮8自转,采用此种结构,下齿圈7只需与一个行星轮8啮合带动行星轮8自转即可,行星轮8的直径可调范围极大,能够在小于或者等于下齿圈7直径二分之一区域内调节,也能够在大于下齿圈7直径二分之一以上的区域内进行调节,行星轮 8的自转比可调节区域广,设置在行星轮8上的搅拌刀运动轨迹能够实现多种变化,例如沿着锅具内壁周向移动以实现逐渐翻炒,或者搅拌刀直接靠近锅具中心翻炒以使食材翻炒均匀,从而能够适应不同食材的烹饪,烹饪效果更加理想,更能适应市场需求;此外,动力输入至第一齿轮3,第一齿轮3内啮合上齿圈5以及同时将动力输送至第二齿轮4后再由第二齿轮4内啮合下齿圈7,本技术采用小齿轮带大齿轮的结构,相比现有技术的行星齿轮结构采用动力输出直接驱动行星轮8自转以及公转,本技术能够输出大力矩,同时用力更小、功耗小,对驱动组件2要求低,从而能够动力降低成本。
50.为了更好的理解行星轮改变自转比时搅拌刀转动轨迹的由疏松至密集变化,参见表1以及图8~图11进行说明。固定在行星轮8上的搅拌刀包括相对设置的两个拌刀,在搅拌刀的自转比和公转比一定时,两个拌刀的轨迹相同,仅是相位上的不同,运动轨迹由拌刀划过锅面的最远点与最远点在锅体投影点连线作为辅助线,而拌刀由起点移动至其轨迹相交时轨迹围成的区域为一个花瓣周期,一个花瓣周期的辅助线与相邻的另一个花瓣周期的辅助线形成一个夹角x。夹角x的大小是描述轨迹的关键指标。
51.为了更好的说明不同夹角x而带来的不同运动轨迹,参见表1,第一齿轮3、上齿圈5、下齿圈7的齿数不变,以变化行星轮8的齿数得出夹角的变化。该表体现了行星轮相对于下齿圈7自小于二分之一至大于二分之一的齿数的变化过程,当行星轮的齿数依次增大时,夹角的度数也呈线性增大。
52.第一齿轮(齿数)上齿圈(齿数)下齿圈(齿数)行星轮(齿数)公转转速比自转转速比夹角124136120.29268293455.38124136180.29268293683.51124136240.292682938111.78124136280.292682939.33333333130.93124136300.2926829310137.49124136320.2926829310.6666667148.11
53.表1:行星轮齿数递增过程中夹角变化表
54.参见图8,取行星轮8内径小于下齿圈7二分之一区域内的其中一个参数进行模拟出来的单个搅拌刀轨迹示意图,下齿圈7取36齿,行星轮取12齿时,两个相邻花瓣周期的辅助线夹角为55.38
°
,此时,单个搅拌刀的搅拌轨迹是沿着锅具的侧壁圆周运动;
55.参见图9,图9为双搅拌刀的搅拌轨迹,在叠加后同样是在沿锅具侧壁以螺旋移动的方式绕圆周运动。
56.此种方式适用于易碎食品,如豆腐类的烹饪,运动轨迹沿周向移动方式,翻炒幅度小。
57.参见图10,图10是取行星轮内径大于下齿圈二分之一区域内的其中一个参数进行
模拟出来的单个搅拌刀轨迹示意图,下齿圈取36齿,行星轮取32齿时,两个相邻花瓣的夹角为148.11
°
,在单个搅拌刀转动中,第一个花瓣周期和第二花瓣周期的相对位置趋向于在锅具的相对两端,如此在翻炒时,能够靠近于锅具中心进行翻炒,使得翻炒更加均匀,能够避免在翻炒搅拌刀中一定时间内只翻炒锅具内一边区域的食材而另一边区域的食材则处于堆积状态。
58.参见图11,图11为双搅拌刀的搅拌轨迹,在叠加后,两个搅拌刀转动过程中相邻的第一花瓣周期和第二花瓣周期的相对位置也是趋向于在锅具的两端,在翻炒食材时,能够对锅具内的食材翻炒均匀,避免在翻炒一边时,总会有部分区域处于堆积状态,从而使得翻炒效果更好。
59.此种方式适用于不易碎或者需要大力翻炒的食品,如蔬菜类或者肉类等等,运动轨迹以趋向于锅具两端对称翻炒的姿态进行运动,翻炒幅度大。
60.工作方法:启动驱动组件2,驱动组件2带动第一齿轮3转动;第一齿轮3 分别带动上齿圈5、第二齿轮4转动;上齿圈5带动转动盘6转动,第二齿轮4 带动下齿圈7转动,固定在转动盘6并于下齿圈7啮合的行星轮8进行公转以及自转,从而使得固定在行星轮8上的搅拌刀实现公转以及自转。
61.实用新型提供的搅拌头100,行星轮8能够适应大范围的公转比以及自转比的调节,从而能够调节搅拌刀运动轨迹的在疏松到密集之间的变化,能够适应不同食材的烹饪,烹饪效果更加理想,更能适应市场需求;此外,能够输出大力矩,用力更小、功耗小,对驱动组件2要求低,从而能够动力降低成本。
62.参见图3,具体的,安装座1包括第一安装部11以及自第一安装部11向下延伸的第二安装部12,驱动组件2、第一齿轮3、第二齿轮4固定于第一安装部11,转动盘6可转动地固定于第二安装部12。进一步地,第二安装部12 和转动盘6之间设有回转体10,第二安装部12通过回转体10与转动盘6连接。回转体10既可以实现转动盘6在安装座1上的安装,又不会干涉转动盘6的转动。
63.在本实施中,回转体10可以采用旋转支撑轴承。
64.进一步地,还可以通调节不同的夹角x以适应不同食材的烹饪,以达到更加的烹调效果,即,具体的,夹角x的范围可以为30~330度。进一步可以为夹角x的范围为72度~288度。如此,此范围内形成的搅拌轨迹,能够同时适应更多的食材烹任。
65.进一步地,还可以通过控制搅拌刀的自转或者公转转速以控制搅拌刀的搅拌轨迹,以达适应不同食材的烹饪,从而提高烹饪效果。即,具体的,上齿圈 5的转速范围可以采用3~90rpm,行星轮8的转速范围可以采用3~270rpm。
66.进一步地,还可以通过控制搅拌刀的自转公转比以控制搅拌刀的搅拌轨迹,即搅拌刀的自转公转比为1.2~30。如此,搅拌刀能够达到较佳的搅拌轨迹,从而达到较佳的烹饪效果。进一步地,搅拌刀的自转公转比可以为1.25~5。如此,此范围内形成的搅拌轨迹,能够同时适应更多的食材烹任。
67.进一步地,设搅拌刀的自转中心延长线与其自转中心和锅口平面中心点连线的夹角为y,夹角y与锅体半径r的正切值的乘积等于两个拌刀间距的二分之一。如此,能够使得两个拌刀之间的中心与锅具中心更趋向相近或者重合,更能使得拌刀能够对锅具中心的食材进行翻炒,翻炒效果更好,从而提高烹饪效果。
68.实施例二
69.参见图2~3,在实施例一的基础上,进一步地,具体的,驱动组件2包括驱动件21、传动组件22以及驱动齿轮23,驱动件21设于安装座1,传动组件 22设于安装座1并由驱动件21驱动转动,具体的,传动组件22包括与所述驱动件21输出端连接的主动齿轮221以及与主动齿轮221啮合的从动齿轮222,驱动齿轮23设于所述安装座1并与传动组件22配合传动,即,驱动齿轮23 与从动齿轮222啮合由从动齿轮222带动转动,第一齿轮3与驱动齿轮23啮合,如此实现对第一齿轮3的动力传动。
70.参见图3,具体的,为了使得驱动齿轮23在后续力传动的过程中不产生晃动,驱动齿轮23的一端穿设安装座1固定,另一端采用支撑件20连接固定后,支撑件20连接于安装座1上,如此使得驱动齿轮23的两端均稳固地固定于安装座1,在后续将力传给第一齿轮3和第二齿轮4中,能够形成稳固的传递关系。
71.在本实施中,驱动件21可以采用但不限于电机。
72.实施例三
73.参见图3,在实施例一或者实施例二的基础上,进一步地,上齿圈5的内径大于下齿圈7的内径,如此能够避免第二齿轮4在与下齿圈7啮合传动时与上齿圈5产生干涉。
74.实施例四
75.参见图3,在实施例一至实施例三任一实施例的基础上,进一步地,转动盘6包括与上齿圈5固定的上盘体61以及连接于上盘体61下方并且套设于下齿圈7外部的下盘体62,行星轮8固定于下盘体62上。如此,通过行星轮8 固定在下盘体62上,下盘体62再连接上盘体61,从而便于行星轮8在转动盘 6上的固定。
76.具体的,下盘体62包括延伸至下齿圈7下方的固定部621,行星轮8固定在固定部621上,以对行星轮8实现支撑。
77.实施例五
78.参见图3,在实施例四的基础上,进一步地,搅拌头100还包括轴承9,轴承9的外圈固定于下盘体62内,下齿圈7与轴承9的内圈固定,如此,可以实现下齿圈7固定的同时还能够实现转动。
79.实施例六
80.参见图1~3,实用新型实施例还提供了一种炒菜机,包括机体(图中未示出)、锅具(图中未示出)以及前述的搅拌头100。其中,锅具设于机体上,搅拌头100的安装座1固定在机体上,搅拌头100位于锅具的上方,转动盘6 上固定第一搅拌刀200,行星轮8固定有第二搅拌刀300,第一搅拌刀200、第二搅拌刀300延伸至锅具内以对食材进行搅拌,第一搅拌刀用于刮落附着在锅具侧壁的食材,第二搅拌刀300用于对堆积在锅具底部的食材进行翻炒。
81.实用新型提供的炒菜机,行星轮8能够适应大范围的公转比以及自转比的调节,从而能够调节搅拌刀运动轨迹的在疏松到密集之间的变化,能够适应不同食材的烹饪,烹饪效果更加理想,更能适应市场需求;此外,能够输出大力矩,用力更小、功耗小,对驱动组件2要求低,从而能够动力降低成本。
82.以上所述仅为实用新型的较佳实施例而已,并不用以限制实用新型,凡在实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1