一种遥控机械式全自动同身寸调节枕的制作方法
1.本实用新型涉及枕头技术领域,具体为一种遥控机械式全自动同身寸调节枕。
背景技术:
2.从人体解剖学的角度来看,在颈椎的前面有一个前凸的弧度,称为生理性前凸(颈曲)。如果在睡觉的时候使用过高的枕头,相当于在整个睡眠过程中,头都被迫处于“低着”的状态,使颈曲度过伸过屈,这样在无形当中就给脖子增加了负担。长此以往,颈项部的肌肉、韧带、椎间盘等软组织就会由于长时间处于紧张状态而出现慢性劳损、痉挛等症状,进而引发颈椎病,如果枕头太低的话,不利于颈椎的生理弯度,往往容易诱发颈椎出现问题,时间过长可能会导致颈椎病发生,另外容易导致大脑供血不足,容易引起睡眠障碍等等。在中医上有同身寸的说法,每个人都有自己的尺寸,因此每个人的睡眠枕头高度都是不同的,然而现在生产出的枕头都是在机器上设定好一个标准参数,生产出的尺寸都是一样的。因此需要研发一款可以进行高度调节的枕头。
3.专利申请号为202122218313.2的中国实用新型专利,公开了一种机械式同身寸调节枕,具体公开了“通过控制第一升降控制杆41或第二升降控制杆51分别实现第一支撑部3与枕芯2的上下运动;第一升降控制杆41通过电动或者手动旋转,使得端部螺纹连接的远端连接杆44在滑槽46内滑动,从而控制第一x形支架42的升降,第一支撑台4在长螺杆47的限位下进行运动,从而带动第一支撑部3运动,长螺杆47的底部在导向筒11内滑动,实现枕头中部位置的高度调节;通过控制第二升降控制杆51实现枕芯2的上下运动;第二升降控制杆51通过电动或者手动旋转,由于螺纹套59固定设置在底座1上,旋转第二升降控制杆51将推动联动推板58前后运动,联动推板58通过中心棒57带动两端的第二近端连接杆53在第二滑槽56内滑动,从而控制第二x形支架52的升降,枕芯2底部四角与底座1四角之间通过带有限位结构的滑动结构相连;所述滑动结构包括枕芯2底部设置的滑竿以及底座1上与滑竿相配合的滑槽。”,该实用新型专利提供的调节枕,能够实现枕头高度的随意调节,但由于枕头两端的调节支架是通过联动推板带动,联动推板由第二升降控制杆在其中部进行推动,因此在使用一段时间后直线运动过程中两侧受力不均匀时会存在偏转的情况,就会导致位于两端的枕头高度会存在高度差,若想避免联动推板的偏转发生,则需要设置联动推板相应的限位滑槽,这样不仅增加了结果复杂度也进一步增加了生产成本。因此亟需一种结构简单能够实现同步调节的调节枕。
技术实现要素:
4.本实用新型的目的在于克服现有技术中的不足而提供一种遥控机械式全自动同身寸调节枕。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种遥控机械式全自动同身寸调节枕,包括与底座通过自动升降装置相连的枕芯;所述自动升降装置包括至少两个设置在枕芯下方的x形升降架;所述x形升降架由减速
电机驱动的丝杆控制升降;所述丝杆沿底座长度方向设置并连接两x形升降架的连接板同步控制x形升降架上下移动;所述x形升降架底部包括相对设置的耦合端与活动端;所述活动端设置有与丝杆螺纹连接的连接板;所述减速电机与控制主板电连接。
7.进一步的,所述枕芯上均匀设有透气孔。
8.进一步的,所述丝杆与设置在底座上方的支撑座相配合;所述耦合端为与支撑座相连的转轴;所述活动端与支撑座滑动连接。
9.进一步的,所述x形升降架并列设置两个。
10.进一步的,所述x形升降架顶部设有第一支撑板。
11.进一步的,所述第一支撑板上设有与枕芯底部形状相匹配的第二支撑板。
12.进一步的,所述控制主板与延伸出底座的遥控器电连接。
13.与现有技术相比,本实用新型的有益效果是:通过利用丝杆同步连接多个x形升降架,能够快速实现多个x形升降架的同步调节,且控制结构简单,利用遥控器控制电机实现自动升降,避免手动操作。x形升降架结构简单,制造成本低,与丝杆配合后能够在任意位置实现定位自锁,稳定可靠。
附图说明
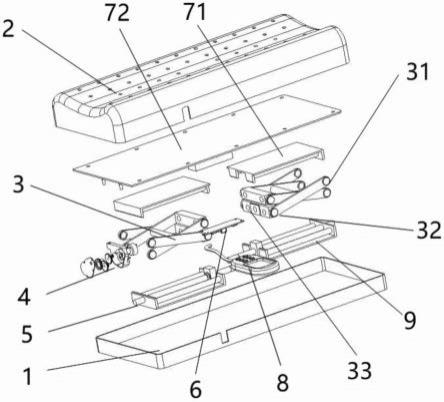
14.图1为本实用新型结构爆炸图;
具体实施方式
15.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.实施例:
17.如图1所示,一种遥控机械式全自动同身寸调节枕,包括与底座1通过自动升降装置相连的枕芯2;所述自动升降装置包括至少两个设置在枕芯2下方的x形升降架3;所述x形升降架3由减速电机4驱动的丝杆5控制升降;所述丝杆5沿底座1长度方向设置并连接两x形升降架3的连接板33同步控制x形升降架3上下移动;所述x形升降架3底部包括相对设置的耦合端31与活动端32;所述活动端32设置有与丝杆5螺纹连接的连接板33;所述减速电机4与控制主板6电连接。枕芯2内设有为电机提供动力的储能电源,使用储能电源可以免去外接电源线的烦恼,实现无线操作。
18.本实用新型的一实施例中,所述枕芯2上均匀设有透气孔。可以有效的实现透气,以及实现对内部电器设备的散热。
19.本实用新型的一实施例中,所述丝杆5与设置在底座1上方的支撑座9相配合;所述耦合端31为与支撑座9相连的转轴;所述活动端32与支撑座9滑动连接。通过减速电机4带动丝杆5旋转,进一步带动连接板33运动,此时耦合端31处做旋转运动,活动端32横向沿着支撑座9滑动,从而实现推动第一支撑板71上下运动,从而调节枕头的高度。
20.本实用新型的一实施例中,所述x形升降架3并列设置两个。设置两个x形升降架3相对于长方形的枕头,能够更好的实现整体的同步上下运动,调节效果更好,且枕头顶部的
稳定性更好。x形升降架3也可以设置超过2个,数量越多,其平稳性更强,可以对枕芯底部实现更多的支撑,平稳性更好,避免使用时产生的晃动。所述x形升降架3顶部设有第一支撑板71。通过第一支撑板71提高了使用的舒适度。
21.本实用新型的一实施例中,所述第一支撑板71上设有与枕芯2底部形状相匹配的第二支撑板72。通过第二支撑板72可以进一步的提升升降时的稳定性,有效的避免两侧升降高度的不统一。
22.本实用新型的一实施例中,所述控制主板6与延伸出底座1的遥控器8电连接。
23.本实用新型使用时通过遥控器8控制减速电机4正转或者反转,从而带动丝杆5正转或者反转进一步的带动x形升降架3升降,由于丝杆5同时与多个x形升降架3连接,因此能够有效的实现同步升降,避免升降不均匀导致升降晃动,影响用户体验,且该连接结构简单,丝杆5沿长度方向设置在底座1内,合理的利用了长度方向的空间,且能够有效的利用x形升降架3底部空间。且丝杆5能够对升降的任意高度实现自锁,稳定性可靠。
24.通过利用丝杆同步连接多个x形升降架,能够快速实现多个x形升降架的同步调节,且控制结构简单,利用遥控器控制电机实现自动升降,避免手动操作。x形升降架结构简单,制造成本低,与丝杆配合后能够在任意位置实现定位自锁,稳定可靠。
25.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1