擦玻璃机器人
1.本实用新型涉及作业的技术领域,特别是涉及一种擦玻璃机器人。
背景技术:
2.随着人们居住的环境越来越高,人力清洗窗户变得越来越费力和危险。为降低人工劳动强度及危险性,清洗窗户的工作逐渐由机器代替人工。传统的擦玻璃机器人仅能对窗户进行横洗或竖洗,清洗效果较差且清洗效率较低。
技术实现要素:
3.本实用新型的目的是克服现有技术中的不足之处,提供一种高效清洗且清洗效果较好的擦玻璃机器人。
4.本实用新型的目的是通过以下技术方案来实现的:
5.一种擦玻璃机器人,包括:
6.机架,形成有相连通的收容腔及裸露口;
7.滚刷机构,包括两个相互平行设置的滚刷件,每一所述滚刷件位于收容腔内并与所述机架转动连接,每一所述滚刷件的至少部分位于所述裸露口处,两个所述滚刷件之间存在避位区;
8.盘刷机构,所述盘刷机构包括齿轮传动组件及两个盘刷件;两个所述盘刷件均位于所述避位区内并与所述机架转动连接,两个所述盘刷件并排设置,每一所述盘刷件形成有相连通的喷淋管道及喷淋孔隙,所述喷淋管道用于外接复合管,每一所述盘刷件的至少部分位于所述裸露口处;所述齿轮传动组件包括第一直齿轮及第二直齿轮,所述第一直齿轮及所述第二直齿轮分别套接于两个所述盘刷件的外周壁上,所述第一直齿轮与所述第二直齿轮啮合传动;每一所述盘刷件的转动方向与每一所述滚刷件的转动方向相互垂直;
9.驱动机构,包括驱动电机、带轮组件、传动皮带及斜齿轮组件,所述驱动电机安装于所述机架,所述驱动电机的两端分别设有第一动力输出端及第二动力输出端,所述带轮组件包括主带轮及两个从带轮,所述主带轮套设于所述第一动力输出端,所述主带轮开设有至少两个套带环槽,两个所述从带轮分别套接于两个所述滚刷件,所述传动皮带的数目为两个,每一所述传动皮带分别套接于一个所述套带环槽及相应的所述从带轮,所述斜齿轮组件包括主斜齿轮及从斜齿轮,所述主斜齿轮套接于所述第二动力输出端,所述从斜齿轮套接于其中一个所述盘刷件,所述主斜齿轮与所述从斜齿轮啮合传动。
10.在其中一个实施例中,每一所述滚刷件的外周壁设有多个滚刷毛环,多个所述滚刷毛环沿所述滚刷件的轴向间隔设置,每一所述滚刷毛环包括多个沿所述滚刷件的周向间隔分布的滚刷毛条。
11.在其中一个实施例中,所述齿轮传动组件还包括两个中间齿轮轴组件,每一所述中间齿轮轴组件包括中间转轴及套设于所述中间转轴的中间齿轮,所述中间转轴位于所述避位区内并与所述机架转动连接,其中一个所述中间齿轮轴组件的中间齿轮与所述第一直
齿轮啮合传动,另外一个所述中间齿轮轴组件的中间齿轮与所述第二直齿轮啮合传动,两个所述中间齿轮轴组件的中间齿轮啮合传动;及/或,
12.每一所述中间齿轮轴组件的中间齿轮的齿数小于所述第一直齿轮的齿数,所述第一直齿轮的齿数等于所述第二直齿轮的齿数。
13.在其中一个实施例中,每一所述盘刷件包括盘刷转轴套、中间输液管、盘刷主体及喷淋套;所述盘刷转轴套位于所述避位区内并与所述机架转动连接,所述盘刷转轴套与所述中间输液管同轴设置,所述盘刷转轴套套接于所述中间输液管的外侧,所述盘刷主体部分位于所述裸露口处,且所述盘刷主体连接于所述盘刷转轴套,所述盘刷主体形成有裸空槽,所述喷淋套位于所述裸空槽内,且所述喷淋套套接于所述中间输液管的一端,所述中间输液管的另一端用于外接所述复合管,所述喷淋管道形成于所述中间输液管,所述喷淋孔隙形成于所述喷淋套;
14.所述第一直齿轮及所述第二直齿轮分别套接于两个所述盘刷件的盘刷转轴套的外周壁,所述从斜齿轮套接于其中一个所述盘刷件的盘刷转轴套的外周壁。
15.在其中一个实施例中,每一所述盘刷件还包括两个滚动轴承,所述盘刷转轴套与所述中间输液管之间形成有安装间隙,两个所述滚动轴承间隔设置于所述安装间隙内,且所述盘刷转轴套套接于每一所述滚动轴承的外圈,每一所述滚动轴承的内圈套接于所述中间输液管;及/或,
16.所述喷淋孔隙的数目为多个,多个所述喷淋孔隙间隔设于所述喷淋套。
17.在其中一个实施例中,每一所述盘刷件的中间输液管包括中间输液管主体、弯管接头及延伸软管,所述盘刷转轴套与所述中间输液管主体同轴设置,所述盘刷转轴套套接于所述中间输液管主体的外侧,所述喷淋套套接于所述中间输液管主体的一端,所述延伸软管的一端通过所述弯管接头与所述中间输液管主体的另一端连接,所述延伸软管用于外接所述复合管。
18.在其中一个实施例中,所述擦玻璃机器人还包括旋转电机、旋转架、主动直齿轮及从动直齿轮,所述旋转电机设于所述旋转架,所述主动直齿轮套设于所述旋转电机的动力输出轴,所述机架形成有凸台,所述旋转架转动套接于所述凸台上,所述从动直齿轮套接于所述凸台的外壁,且所述从动直齿轮与所述主动直齿轮啮合传动,所述旋转架形成有避位口,所述延伸软管通过所述避位口外接所述复合管。
19.在其中一个实施例中,所述旋转架上设有弧形滑块,所述机架的外壁上形成有弧形滑槽,所述弧形滑槽环绕于所述凸台设置,所述弧形滑块位于所述弧形滑槽内并与所述机架滑动连接;及/或,
20.所述旋转架形成有安全绳固定孔。
21.在其中一个实施例中,擦玻璃机器人还包括风机安装架、伺服电机及风扇叶,所述裸露口形成于所述机架的一端,所述机架的另一端形成有与所述收容腔连通的安装槽口,所述风扇叶位于所述安装槽口内,所述风机安装架位于所述收容腔内壁,所述伺服电机的动力输出轴与所述风扇叶连接,以驱动所述风扇叶正转或反转;所述机架形成有所述裸露口的端部的周缘凸设有贴合胶块;
22.当所述伺服电机驱动所述风扇叶正转时,所述收容腔内产生负压,所述贴合胶块贴附于玻璃上;
23.当所述伺服电机驱动所述风扇叶反转时,所述收容腔内产生正压,所述贴合胶块松开于玻璃上。
24.在其中一个实施例中,擦玻璃机器人还包括第一行走滚轮组、第二行走滚轮组、行走电机及防跌落传感器;所述第一行走滚轮组及所述第二行走滚轮组分别转动设置于所述机架沿行走方向的两侧;所述行走电机设于所述机架,且所述行走电机的动力输出端与所述第一行走轮组连接,以驱动所述第一行走滚轮组相对于所述机架转动;所述防跌落传感器的数目为两个,两个所述防跌落传感器分别设于所述机架沿行走方向的两侧,每一所述防跌落传感器与所述行走电机的控制端电连接,所述行走电机用于在其中一个所述防跌落传感器产生感应信号时驱动所述第一行走滚轮组换向转动。
25.与现有技术相比,本实用新型至少具有以下优点:
26.1、上述的擦玻璃机器人,当驱动电机工作时,第一动力输出端的动力通过主带轮和相应的传动皮带传递至相应的从带轮,第二动力输出端的动力通过主斜齿轮及从斜齿轮带动其中一个盘刷件相对于机架转动,由于第一直齿轮及第二直齿轮分别套接于两个盘刷件的外周壁上,第一直齿轮与第二直齿轮啮合传动,使两个盘刷件相对于机架同步转动,如此实现滚刷机构及盘刷机构的动作;
27.2、由于每一滚刷件位于收容腔内并与机架转动连接,每一滚刷件的至少部分位于裸露口处,又由于两个盘刷件均位于避位区内并与机架转动连接,两个盘刷件并排设置,每一盘刷件的至少部分位于裸露口处,每一盘刷件形成有相连通的喷淋管道及喷淋孔隙,喷淋管道外接复合管,使每一滚刷件及盘刷件均能够对玻璃进行洗刷,加上每一盘刷件的转动方向与每一滚刷件的转动方向相互垂直,进而使擦玻璃机器人更好地对玻璃进行洗刷清洗,提高了擦玻璃机器人的清洗效率及清洗效果。
附图说明
28.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
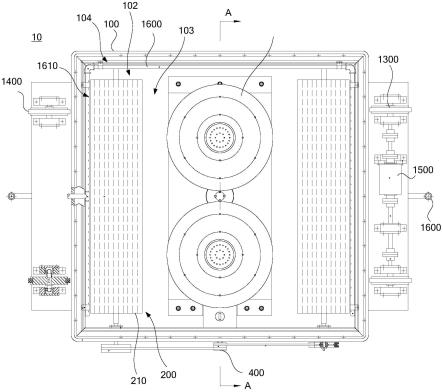
29.图1为一实施例的擦玻璃机器人的示意图;
30.图2为图1所示的擦玻璃机器人的a-a剖视图;
31.图3为图2所示的擦玻璃机器人的局部立体示意图;
32.图4为图2所示的擦玻璃机器人的b-b剖视图。
具体实施方式
33.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施方式。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本实用新型的公开内容理解的更加透彻全面。
34.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接
到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
35.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
36.如图1至图3所示,一实施例的擦玻璃机器人10包括机架100、滚刷机构200、盘刷机构300以及驱动机构400。其中,机架100形成有相连通的收容腔102及裸露口104;滚刷机构200包括两个相互平行设置的滚刷件210,每一所述滚刷件210位于收容腔102内并与所述机架100转动连接,每一所述滚刷件210的至少部分位于所述裸露口104处,两个所述滚刷件210之间存在避位区103。所述盘刷机构300包括齿轮传动组件310及两个盘刷件320;两个所述盘刷件320均位于所述避位区103内并与所述机架100转动连接,两个所述盘刷件320并排设置,每一所述盘刷件320形成有相连通的喷淋管道302及喷淋孔隙304,所述喷淋管道302用于外接复合管,每一所述盘刷件320的至少部分位于所述裸露口104处;所述齿轮传动组件310包括第一直齿轮312及第二直齿轮314,所述第一直齿轮312及所述第二直齿轮314分别套接于两个所述盘刷件320的外周壁上,所述第一直齿轮312与所述第二直齿轮314啮合传动;每一所述盘刷件320的转动方向与每一所述滚刷件210的转动方向相互垂直。
37.进一步地,驱动机构400包括驱动电机410、带轮组件420、传动皮带430及斜齿轮组件440,所述驱动电机410安装于所述机架100,所述驱动电机410的两端分别设有第一动力输出端及第二动力输出端,所述带轮组件420包括主带轮422及两个从带轮424,所述主带轮422套设于所述第一动力输出端,所述主带轮422开设有至少两个套带环槽,两个所述从带轮424分别套接于两个所述滚刷件210,所述传动皮带430的数目为两个,每一所述传动皮带430分别套接于一个所述套带环槽及相应的所述从带轮424,所述斜齿轮组件440包括主斜齿轮442及从斜齿轮444,所述主斜齿轮442套接于所述第二动力输出端,所述从斜齿轮444套接于其中一个所述盘刷件320,所述主斜齿轮442与所述从斜齿轮444啮合传动。
38.上述的擦玻璃机器人10,当驱动电机410工作时,第一动力输出端的动力通过主带轮422和相应的传动皮带430传递至相应的从带轮424,第二动力输出端的动力通过主斜齿轮442及从斜齿轮444带动其中一个盘刷件320相对于机架100转动,由于第一直齿轮312及第二直齿轮314分别套接于两个盘刷件320的外周壁上,第一直齿轮312与第二直齿轮314啮合传动,使两个盘刷件320相对于机架100同步转动,如此实现滚刷机构200及盘刷机构300的动作;由于每一滚刷件210位于收容腔102内并与机架100转动连接,每一滚刷件210的至少部分位于裸露口104处,又由于两个盘刷件320均位于避位区103内并与机架100转动连接,两个盘刷件320并排设置,每一盘刷件320的至少部分位于裸露口104处,每一盘刷件320形成有相连通的喷淋管道302及喷淋孔隙304,喷淋管道302外接复合管,使每一滚刷件210及盘刷件320均能够对玻璃进行洗刷,加上每一盘刷件320的转动方向与每一滚刷件210的转动方向相互垂直,进而使擦玻璃机器人10更好地对玻璃进行洗刷清洗,提高了擦玻璃机器人10的清洗效率及清洗效果。
39.如图3所示,在其中一个实施例中,每一所述滚刷件210的外周壁设有多个滚刷毛环214,多个所述滚刷毛环214沿所述滚刷件210的轴向间隔设置,每一所述滚刷毛环214包
括多个沿所述滚刷件210的周向间隔分布的滚刷毛条,使每一滚刷件210在相对于机架100转动时更好地对玻璃进行滚刷清洗。
40.如图3所示,进一步地,擦玻璃机器人10还包括喷淋管体1600,喷淋管体位于收容腔102内并与机架连接,喷淋管体邻近裸露口设置,喷淋管体邻近每一滚刷件210的位置设有喷淋射孔1610,使每一滚刷件在擦洗玻璃过程中,喷淋射孔朝滚刷件上喷射清洗液体。在本实施例中,喷淋管体1600设有外接水口,以便外接复合管。
41.如图1与图2所示,在其中一个实施例中,所述齿轮传动组件310还包括两个中间齿轮轴组件316,每一所述中间齿轮轴组件316包括中间转轴3162及套设于所述中间转轴3162的中间齿轮3164,所述中间转轴3162位于所述避位区103内并与所述机架100转动连接,其中一个所述中间齿轮轴组件316的中间齿轮3164与所述第一直齿轮312啮合传动,另外一个所述中间齿轮轴组件316的中间齿轮3164与所述第二直齿轮314啮合传动,两个所述中间齿轮轴组件316的中间齿轮3164啮合传动,使第一直齿轮312与第二直齿轮314间接啮合传动。及/或,在其中一个实施例中,每一所述中间齿轮轴组件316的中间齿轮3164的齿数小于所述第一直齿轮312的齿数,所述第一直齿轮312的齿数等于所述第二直齿轮314的齿数,使第一直齿轮312与第二直齿轮314更好地实现等速传动。由于其中一个所述中间齿轮轴组件316的中间齿轮3164与所述第一直齿轮312啮合传动,另外一个所述中间齿轮轴组件316的中间齿轮3164与所述第二直齿轮314啮合传动,两个所述中间齿轮轴组件316的中间齿轮3164啮合传动,使第一直齿轮312的转动方向与第二直齿轮314的转动方向相反,进而使两个盘刷件320的转动方向相反,使两个盘刷件320更好地对玻璃进行盘刷清洗。
42.如图2所示,在其中一个实施例中,每一所述盘刷件320包括盘刷转轴套320a、中间输液管320b、盘刷主体320c及喷淋套320d。所述盘刷转轴套320a位于所述避位区103内并与所述机架100转动连接,所述盘刷转轴套320a与所述中间输液管320b同轴设置,所述盘刷转轴套320a套接于所述中间输液管320b的外侧,所述盘刷主体320c部分位于所述裸露口104处,且所述盘刷主体320c连接于所述盘刷转轴套320a。所述盘刷主体320c形成有裸空槽321,所述喷淋套320d位于所述裸空槽内,且所述喷淋套320d套接于所述中间输液管320b的一端,所述中间输液管320b的另一端用于外接所述复合管,所述喷淋管道302形成于所述中间输液管320b,所述喷淋孔隙304形成于所述喷淋套320d,使清洗液体通过复合管、中间输液管320b及喷淋套320d输出,实现盘刷件320的喷淋盘刷清洗操作。
43.如图2所示,在其中一个实施例中,所述第一直齿轮312及所述第二直齿轮314分别套接于两个所述盘刷件320的盘刷转轴套320a的外周壁,所述从斜齿轮444套接于其中一个所述盘刷件320的盘刷转轴套320a的外周壁,使驱动机构400通过斜齿轮组件440驱动两个盘刷机构300动作。
44.如图2所示,在其中一个实施例中,每一所述盘刷件320还包括两个滚动轴承320e,所述盘刷转轴套320a与所述中间输液管320b之间形成有安装间隙323,两个所述滚动轴承320e间隔设置于所述安装间隙3202内,且所述盘刷转轴套320a套接于每一所述滚动轴承320e的外圈,每一所述滚动轴承320e的内圈套接于所述中间输液管320b,使盘刷转轴套320a与中间输液管320b相对转动的摩擦阻力较小,同时使每一盘刷件320与机架100转动连接,同时实现可靠地进液喷淋盘刷操作。及/或,在其中一个实施例中,所述喷淋孔隙304的数目为多个,多个所述喷淋孔隙304间隔设于所述喷淋套320d,以对玻璃进行均匀喷淋。
45.如图2所示,在其中一个实施例中,每一所述盘刷件320的中间输液管320b包括中间输液管主体3203、弯管接头3205及延伸软管3207,所述盘刷转轴套320a与所述中间输液管主体3203同轴设置,所述盘刷转轴套320a套接于所述中间输液管主体3203的外侧,所述喷淋套320d套接于所述中间输液管主体3203的一端,所述延伸软管3207的一端通过所述弯管接头3205与所述中间输液管主体3203的另一端连接,所述延伸软管3207用于外接所述复合管,使每一盘盘刷件320的中间输液管320b更好地外接复合管。
46.如图2及图3所示,在其中一个实施例中,所述擦玻璃机器人10还包括旋转电机500、旋转架600、主动直齿轮700及从动直齿轮800,所述旋转电机500设于所述旋转架600,所述主动直齿轮700套设于所述旋转电机500的动力输出轴,所述机架100形成有凸台120,所述旋转架600转动套接于所述凸台120上,所述从动直齿轮800套接于所述凸台120的外壁,且所述从动直齿轮800与所述主动直齿轮700啮合传动,使旋转电机500通过主动直齿轮700及从动直齿轮800驱动旋转架600相对于机架100转动,通过旋转电机500驱动旋转架600相对于机架100转动,使机架100在相对于玻璃擦洗时更好地转向,如此更好地实现横洗与纵洗的切换。所述旋转架600形成有避位口,所述延伸软管3207通过所述避位口外接所述复合管,以便延伸软管3207更好地外接符合管。在本实施例中,旋转电机500为伺服电机1100。在本实施例中,所述旋转架600通过轴承转动套接于所述凸台120上,使旋转架600更好地转动连接于凸台120。
47.如图2及图3所示,在其中一个实施例中,所述旋转架600上设有弧形滑块610,所述机架100的外壁上形成有弧形滑槽130,所述弧形滑槽环绕于所述凸台120设置,所述弧形滑块610位于所述弧形滑槽内并与所述机架100滑动连接,使旋转架600相对于机架100的旋转更加平稳。及/或,在其中一个实施例中,所述旋转架600形成有安全绳固定孔,以便通过安全绳固定孔系上安全绳,以防擦玻璃机器人10意外掉落的问题。
48.如图4所示,在其中一个实施例中,擦玻璃机器人10还包括风机安装架900、伺服电机1100及风扇叶1200,所述裸露口104形成于所述机架100的一端,所述机架100的另一端形成有与所述收容腔102连通的安装槽口105,所述风扇叶1200位于所述安装槽口内,所述风机安装架900设于收容腔内壁,所述伺服电机1100的动力输出轴与所述风扇叶1200连接,以驱动所述风扇叶1200正转或反转;所述机架100形成有所述裸露口104的端部的周缘凸设有贴合胶块;当所述伺服电机1100驱动所述风扇叶1200正转时,所述收容腔102内产生负压,所述贴合胶块贴附于玻璃上,使机架100通过贴合胶块更好地贴附于玻璃,避免擦玻璃机器人10容易掉落的问题;当所述伺服电机1100驱动所述风扇叶1200反转时,所述收容腔102内产生正压,所述贴合胶块松开于玻璃上,以便快速地取下擦玻璃机器人10。
49.如图1及图4所示,在其中一个实施例中,擦玻璃机器人10还包括第一行走滚轮组1300、第二行走滚轮组1400、行走电机1500及防跌落传感器1600;所述第一行走滚轮组1300及所述第二行走滚轮组1400分别转动设置于所述机架100沿行走方向的两侧;所述行走电机1500设于所述机架100,且所述行走电机1500的动力输出端与所述第一行走轮组连接,以驱动所述第一行走滚轮组1300相对于所述机架100转动;所述防跌落传感器1600的数目为两个,两个所述防跌落传感器1600分别设于所述机架100沿行走方向的两侧,每一所述防跌落传感器1600与所述行走电机1500的控制端电连接,所述行走电机1500用于在其中一个所述防跌落传感器1600产生感应信号时驱动所述第一行走滚轮组1300换向转动,当擦玻璃机
器人10的防跌落传感器1600探测到玻璃边框不是安全距离时,从而进行换向清洗,避免擦玻璃机器人10掉落的问题。
50.与现有技术相比,本实用新型至少具有以下优点:
51.1、上述的擦玻璃机器人10,当驱动电机410工作时,第一动力输出端的动力通过主带轮422和相应的传动皮带430传递至相应的从带轮424,第二动力输出端的动力通过主斜齿轮442及从斜齿轮444带动其中一个盘刷件320相对于机架100转动,由于第一直齿轮312及第二直齿轮314分别套接于两个盘刷件320的外周壁上,第一直齿轮312与第二直齿轮314啮合传动,使两个盘刷件320相对于机架100同步转动,如此实现滚刷机构200及盘刷机构300的动作;
52.2、由于每一滚刷件210位于收容腔102内并与机架100转动连接,每一滚刷件210的至少部分位于裸露口104处,又由于两个盘刷件320均位于避位区103内并与机架100转动连接,两个盘刷件320并排设置,每一盘刷件320的至少部分位于裸露口104处,每一盘刷件320形成有相连通的喷淋管道302及喷淋孔隙304,喷淋管道302外接复合管,使每一滚刷件210及盘刷件320均能够对玻璃进行洗刷,加上每一盘刷件320的转动方向与每一滚刷件210的转动方向相互垂直,进而使擦玻璃机器人10更好地对玻璃进行洗刷清洗,提高了擦玻璃机器人10的清洗效率及清洗效果。
53.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1