一种多功能扫地机器人和机器人系统
1.本实用新型属于清洁设备技术领域,具体涉及一种多功能扫地机器人和机器人系统。
背景技术:
2.扫地机器人是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。
3.现有技术的扫地机器人通常包括行走装置、雷达装置、扫地装置和拖地装置等。扫地机器人以圆盘型为主。使用充电电池供电,可以通过遥控器或者机器上的操作面板来控制。一般能设定时间预约打扫和自行充电。前方设置有感应器,可侦测障碍物,如碰到墙壁或其他障碍物时会自行转弯,在室内反复行走,执行沿边清扫、集中清扫、随机清扫和直线清扫等路径打扫,并辅以边刷、中央滚刷旋转和抹布,切换扫地与拖地模式以加强打扫效果,完成拟人化居家清洁效果。
4.现有技术的扫地机器人存在以下技术问题:扫地机器人的拖盘容易被台阶卡住,导致无法顺利通过台阶,难以胜任复杂的清洁场景。
技术实现要素:
5.针对现有技术中存在的技术问题,本实用新型的目的之一是:提供一种多功能扫地机器人,拖盘不会被台阶卡住,可以顺利通过台阶,能够胜任复杂的清洁场景。
6.针对现有技术中存在的技术问题,本实用新型的目的之二是:提供一种扫地机器人系统,具有能够维护扫地机器人的机站,其中的扫地机器人能够顺利通过台阶。
7.本实用新型目的通过以下技术方案实现:
8.一种多功能扫地机器人,包括壳体,壳体上设有模式切换机构以及驱动旋转的边刷和拖盘;
9.边刷和拖盘同轴设置且分别上下滑动连接于壳体;
10.拖盘设有可供边刷上下穿过的通孔;
11.扫地机器人具有扫地模式和拖地模式;
12.模式切换机构分别连接于边刷和拖盘,用于驱使边刷和拖盘做异向运动以切换扫地机器人的扫地模式和拖地模式;
13.其中,由拖地模式切换为扫地模式时,边刷由上往下穿过拖盘通孔;由扫地模式切换为拖地模式时,边刷由下往上穿过拖盘通孔。
14.进一步,拖盘中间设有拱起部,拱起部上下滑动连接于壳体,边刷设于拱起部下方。
15.进一步,壳体滑动连接有驱动旋转的直齿轮,直齿轮竖向布置,边刷固接于直齿轮,拖盘拱起部设有拖盘齿轮,拖盘齿轮与直齿轮啮合传动且上下滑动于直齿轮,模式切换机构分别连接于拖盘拱起部和直齿轮。
16.进一步,模式切换机构包括下压件、弹簧、活动支架和驱动旋转的推杠;
17.拖盘拱起部上端设有环形压槽,下压件抵接于环形压槽;
18.推杠包括互相连接的上推杠和下推杠;
19.下压件顶部设有上滑槽,上推杠穿设于上滑槽;
20.直齿轮固接有法兰,活动支架设于法兰和下压件之间;
21.活动支架设有下滑槽,下推杠穿设于下滑槽;
22.弹簧两端分别抵接于拖盘拱起部底端与边刷顶部。
23.进一步,上滑槽和下滑槽互相平行。
24.进一步,环形压槽设有漏水孔,下压件设有上下贯穿的排水孔,排水孔顶部设有水管接头。
25.进一步,壳体前部设有前轮转向机构。
26.进一步,壳体中部设有滚刷,滚刷与边刷具有重叠工作区域。
27.进一步,壳体设有风机,壳体后部设有出风孔。
28.一种多功能扫地机器人系统,包括机站和一种多功能扫地机器人,机站设有充电装置、清洁装置和加水装置;
29.充电装置用于为多功能扫地机器人充电;
30.清洁装置用于为多功能扫地机器人清洗拖盘;
31.加水装置用于为多功能扫地机器人添加用水。
32.与现有技术相比,本实用新型具有以下有益效果:
33.拖盘向上提升后,与地面之间具有较大距离,当扫地机器人遇到台阶时,拖盘不会被台阶卡住,边刷在旋转过程中可以攀上台阶;也可以控制拖盘和边刷处于相同高度,使扫地机器人能够顺利通过台阶,可以胜任较为复杂的清洁场景。
附图说明
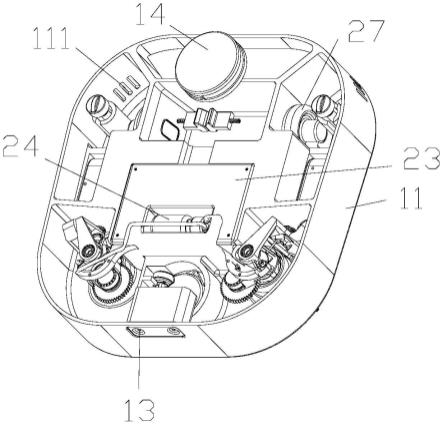
34.图1是本实用新型的扫地机器人(去除顶盖后)的立体结构示意图。
35.图2为本实用新型的扫地机器人内部部分零件结构示意图。
36.图3为本实用新型的模式切换机构的立体结构示意图。
37.图4为本实用新型的拖盘和压棒的立体结构示意图。
38.图5是本实用新型的直齿轮和边刷的立体结构示意图。
39.图6为本实用新型的扫地机器人的整体结构示意图。
40.图7为本实用新型的机站的整体结构示意图。
41.图8为本实用新型的机站的结构分解示意图。
42.图号:
43.11-底壳,111-出风孔,12-顶盖,13-超声波测距传感器,14-云台与激光雷达导航;
44.21-滚刷电机,22-滚刷,23-供水水箱,24-蠕动泵,25-行走电机,26-行走轮,27-吸尘风机,28-控制电路板,291-前轮,292-蜗杆;
45.31-扫拖电机,32-主齿轮,33-直齿轮,331-法兰,34-拖盘齿轮,35-弹簧;
46.41-拖盘,411-拖盘通孔,412-拱起部,413-环形压槽,4131-漏水孔,414-上滑槽,42-边刷;
47.51-模式切换电机,52-锥齿轮组;
48.61-上推杠,62-下推杠,63-半环形件,64-压棒,65-水管接头;
49.71-活动支架,711-下滑槽;
50.81-机站外壳,82-加湿器水箱,83-净水器,831-注水管,832-垃圾回收管,84-蒸发式加湿器,85-机站电路板,86-斜坡板,87-点状突起。
具体实施方式
51.下面对本实用新型作进一步详细的描述。
52.如图1、图2、图6所示,一种多功能扫地机器人,包括由底壳11和顶盖12组成的壳体以及设于壳体上的各个功能机构,具有扫地模式和拖地模式,能够胜任较复杂场景的地面清洁。
53.壳体前部中间设有利用蜗轮蜗杆292传动的前轮291转向机构和视觉导航。
54.前轮291转向机构用于调整扫地机器人的前进方向,增加转向灵活度。视觉导航包括三个超声波测距传感器13,用于检测扫地机器人行进路线上是否有障碍物,并相应调整行进路线。
55.壳体前部两侧分别设有扫拖机构和模式切换机构。
56.扫拖机构包括扫拖电机31、主齿轮32、边刷42和拖盘41。
57.如图5所示,本实施例中,边刷42包括三根放射状布置的刷条,边刷42中心设有竖直布置的直齿轮33,边刷42固接于直齿轮33下端。
58.直齿轮33的上端设有圆柱段,底壳11通过轴承滑动连接于圆柱段,使直齿轮33能够相对于底壳11上下滑动。
59.如图4所示,拖盘41开设有与三根刷条相匹配的拖盘通孔411,刷条可上下穿过拖盘通孔411。拖盘41中部设有向上突起的拱起部412。拱起部412内设有空腔,边刷42设于拱起部412下方,边刷42中心向上提升后可进入空腔内。
60.拱起部412中心设有与直齿轮33啮合传动的拖盘齿轮34,拖盘41拱起部412能够沿直齿轮33上下滑动。
61.扫拖电机31固设于底壳11,驱动主齿轮32转动,主齿轮32带动直齿轮33转动,进而带动拖盘41和边刷42转动。
62.如图2、图3、图5所示,模式切换机构分别连接于边刷42和拖盘41,用于驱使边刷42和拖盘41做异向运动以切换扫地机器人的扫地模式和拖地模式,其包括模式切换电机51、锥齿轮组52、推杠、活动支架71、下压件和弹簧35。
63.模式切换电机51固接于底壳11,用于驱动锥齿轮组52转动。锥齿轮组52与推杠连接,用于带动推杠转动。
64.推杠包括互相连接的上推杠61和下推杠62,上推杠61和下推杠62的旋转轴线均位于推杠中轴线上。优选地,上推杠61和下推杠62互相平行且一体成型。
65.如图4所示,下压件包括半环形件63和穿设于半环形件63的压棒64。半环形件63环设于直齿轮33外。压棒64竖直滑动连接于壳体且固接于半环形件63。
66.拖盘41拱起部412顶端设有与压棒64相匹配的环形压槽413,压棒64下端抵接于环形压槽413;半环形件63顶部设有水平的长条形上滑槽414,上推杠61穿设于上滑槽414。
67.活动支架71设于拖盘41拱起部412与锥齿轮组52之间。
68.直齿轮33上端固接有法兰331,活动支架71上端水平嵌设于法兰331和半环形件63之间,活动支架71下端设有水平的长条形下滑槽711,下推杠62穿设于下滑槽711。
69.弹簧35设于拱起部412空腔内,两端分别抵接于拖盘41拱起部412底端与边刷42顶部。
70.具体地,从扫地模式切换为拖地模式时,模式切换电机51驱使锥齿轮组52旋转,带动推杠旋转。其中,上推杠61旋转时在上滑槽414内滑动,带动半环形件63和压棒64向下移动,压棒64向下紧压环形压槽413,带动拖盘41克服弹簧35弹力沿直齿轮33向下移动。同时,下推杠62旋转时在下滑槽711内滑动,带动活动支架71转动,活动支架71向上翻起,将法兰331向上顶起,使法兰331带动直齿轮33和边刷42向上移动,边刷42向上穿过拖盘通孔411后,拖盘41位于壳体下方,可进行拖地工作。
71.从拖地模式切换为扫地模式时,模式切换电机51驱使锥齿轮组52反方向旋转,带动推杠反方向旋转,其中,上推杠61带动半环形件63和压棒64向上移动,压棒64不再向下施压于环形压槽413,拖盘41在弹簧35弹力作用下沿直齿轮33向上移动。同时,下推杠62反方向旋转,带动活动支架71反方向转动,活动支架71由翻起状态复位至水平状态,给法兰331留出向下移动的空间,边刷42在弹簧35弹力作用下沿直齿轮33向下移动,穿过拖盘通孔411移动至拖盘41下方,可进行扫地工作。
72.拖盘41向上提升后,与地面之间具有较大距离,当扫地机器人遇到台阶时,拖盘41不会被台阶卡住,边刷42在旋转过程中可以攀上台阶;也可以控制拖盘41和边刷42处于相同高度,使二者均与地面之间留有一段距离,从而使扫地机器人能够顺利通过台阶,可以胜任较为复杂的清洁场景。
73.如图2所示,壳体内设有滚刷22机构、供水机构、行驶动力单元、吸尘风机27、电路板和紫外线灯。
74.滚刷22机构包括滚刷电机21、由滚刷电机21驱动的滚刷22和尘盒。
75.本实施例中,边刷42数量为两个,滚刷22设于两个边刷42之间,滚刷22与两个边刷42之间均具有重叠的工作区域,确保边刷42向内扫进的垃圾可由滚刷22收集到尘盒内。
76.供水机构包括供水水箱23和蠕动泵24。蠕动泵24从供水水箱23里向扫拖机构供水。蠕动泵24的出口连接至压棒64上的水管接头65。压棒64为中空状,水流从中空的压棒64向下流出,经过环形压槽413的漏水孔4131后向下流到拖盘41下,自动为拖盘41提供清洁所需用水。
77.蠕动泵24通过滚轮夹挤一根充满流体的软管,软管内形成负压,然后液体随着滚轮滑动的方向向前移动。它不需要另外配置水阀、机械密封和填料密封装置,维护简单,而且具有良好的自吸能力,可空转并防止回流,无液体空转情况下也不会对蠕动泵24造成损害。得益于此,本实施例中的扫地机器人采用供水水箱23结合蠕动泵24的方案,相对而言寿命更长、控制更准、不易堵塞。
78.行驶动力单元包括行走电机25和行走轮26。行走电机25通过皮带传动驱使行走轮26前进。
79.吸尘风机27用于为地面或地毯的吸尘。吸尘风机27的排风管对准壳体的出风孔111,在拖盘41和边刷42都无法清洁到的某些地方(比如墙角处),可以通过出风孔111的排
风将灰尘吹出墙角再进行清洁,有利于得到更全面的清洁效果。
80.壳体内设置的紫外线灯用于杀菌,特别适用于养有宠物的家庭。它能有效破坏细菌的dna和rna的结构,杀灭细菌、抑制细菌和病菌的滋生。对于家内通光和通风性不好的地方,经常使用紫外线杀菌灯,可以有效杀灭包括被褥螨虫等各种病菌,有利于创建健康的居住环境。为了防止紫外线对人眼的影响,当人抬起扫地机器人时,系统会自动关闭紫外线灯,避免紫外线射入眼睛而造成视力受损。
81.壳体内设置的控制电路板28是扫地机器人的控制中心,控制各个机构的运行。
82.顶盖12上设有云台与激光雷达导航14。
83.一种多功能扫地机器人系统,包括机站和一种多功能扫地机器人。
84.如图7、图8所示,机站前端设有开口,开口前设有斜坡板86,方便扫地机器人进出机站。
85.机站外壳81内设有加湿器水箱82、净水器83、蒸发式加湿器84和机站电路板85等。
86.常见的加湿器有超声波式和蒸发式。从超声波加湿器出来的白雾其实是一滴滴小水珠,很容易吸附空气中的灰尘、细菌等细微颗粒,从而形成二次空气污染。而蒸发式加湿器84一般采用冷蒸发工艺,最大的优点是加湿效果均匀,是更加健康的加湿方法。本实用新型采用了蒸发式加湿器84,另外还配置了一个独立的加湿器水箱82,无需使用净水器83的水,可避免对蒸发式加湿器84的水造成污染。
87.扫地机器人在完成拖地工作后返回机站,通过净水器83进行拖盘41清洗,所产生的污水可通过净水器83进行二次净化处理,存放在机站外壳81里的水箱内,然后可通过注水管831再次注入扫地机器人供水水箱23里或用于清洗拖盘41。在机站外壳81内腔底部设有多个点状突起87,能够帮助拖盘41在旋转时增加摩擦,从而更好地洗去污渍。
88.当扫地机器人返回机站时,机站工作分别为:
89.1.在扫地模式下,扫地机器人返回机站,机站启动垃圾回收功能。机站通过垃圾回收管832和机站的吸尘机,将扫地机器人的尘盒内的垃圾吸进机站内打包,用户无需从扫地机器人上取出尘盒来倒垃圾,垃圾会在机站中自动打包装袋,并且同时对扫地机器人进行充电。
90.2.在拖地模式下,扫地机器人返回机站,机站启动对拖盘41清洗的功能,保持拖盘41干净。与此同时会对供水水箱23补给拖地用水或为扫地机器人进行充电。在拖盘41清洗干净后,会对扫地机器人进行表面烘干处理,防止潮湿生成细菌的培养室。清洗出来的污水会进入水槽,被吸进净水器83里净化,实现重复利用水资源。
91.上述实施例为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1