加液装置及机器人工作站的制作方法
1.本技术属于清洁设备技术领域,更具体地说,是涉及一种加液装置及机器人工作站。
背景技术:
2.智能清洁机器人是一种能够实现自动扫地、吸尘及拖地功能于一体的智能硬件产品,因其具有清洁效率高、清扫效果较好等优点,已逐步取代人力,适用于各种室内环境,例如商场、办公楼、走道以及酒店等。
3.一些智能清洁机器人还配备有机器人工作站,在清扫机器人与机器人工作站对接后,机器人工作站能够对智能清洁机器人进行排污、加液及充电等服务。但传统机器人工作站在对智能清洁机器人添加清洗液时,若机器人工作站与智能清洁机器人的加液口未对接好,则易出现清洗液溢出的现象,导致资源的浪费,另外,溢出的清洗液还可能引发充电线路短路,存在安全隐患。
技术实现要素:
4.本技术实施例的目的在于提供一种加液装置及机器人工作站,以解决现有技术中存在的统机器人工作站在对智能清洁机器人加注清洗液时,若机器人工作站与智能清洁机器人的接水口未对接好,则易出现清洗液溢出的技术问题。
5.为实现上述目的,本技术采用的技术方案是:提供一种加液装置,包括:
6.清洗液添加机构,包括输液管、第一控制阀及注液嘴;所述第一控制阀设置在所述输液管上,所述注液嘴与所述输液管的一端连接;及
7.对接防错机构,包括感应棒、行程开关及弹性件;所述行程开关固定设置在所述注液嘴上,所述感应棒活动设置在所述注液嘴上,能够沿远离或靠近所述输液管的方向移动;所述感应棒的一端与所述行程开关对应设置;所述弹性件弹性抵接所述感应棒,用于驱动所述感应棒的另一端沿远离所述输液管的方向伸出所述注液嘴。
8.本技术提供的加液装置的有益效果在于:与现有技术相比,本技术的加液装置通过设置对接防错机构,当注液嘴与清洁机器人的加液口错位对接时,感应棒伸出注液嘴的一端与清洁机器人发生碰触,使感应棒沿靠近输液管的方向移动,进而使感应棒的另一端撞击行程开关,行程开关被触发,机器人工作站基于行程开关的触发信号,控制第一控制阀处于关闭状态,此时无法通过输液管向清洁机器人添加清洗液,有效防止在注液嘴与清洁机器人的加液口未对接好的情况进行添加清洁液,而导致发生清洗液溢出的现象,有利于减少资源的浪费及减少充电线路短路的现象,有利于提高安全性。注液嘴从清洁机器人的加液口拔出后,弹性件驱动感应棒沿远离输液管的方向,使感应棒的一端与行程开关分开,另一端伸出注液嘴,以便进行下一次触发工作。
9.可选地,所述清洗液添加机构还包括第一液泵,所述第一液泵设置在所述输液管上。
10.可选地,所述清洗液添加机构还包括液压传感器,所述液压传感器设置在所述输液管上。
11.可选地,所述对接防错机构还包括套管及导向件,所述导向件设置在所述套管的外部上,所述行程开关设置在所述套管的一端上,所述感应棒活动穿设在所述导向件上,所述感应棒上设置有挡位片,所述弹性件的两端分别与所述挡位片及所述导向件抵接。
12.可选地,所述导向件包括第一导向块及第二导向块,所述第一导向块及所述第二导向块沿所述套管的轴向间隔设置,且所述第一导向块靠近所述行程开关设置,所述第二导向块远离所述行程开关设置,所述挡位片设于所述第一导向块与所述第二导向块之间,所述弹性件活动套设在所述感应棒上,并设于所述挡位片与所述第一导向块之间。
13.可选地,所述对接防错机构还包括保护罩及外管,所述保护罩罩设于所述导向件及所述弹性件,所述外管套设在所述保护罩及所述套管上,所述行程开关设于所述外管内。
14.可选地,所述加液装置还包括清洁剂添加机构,所述清洁剂添加机构连接所述输液管。
15.可选地,所述清洗液添加机构还包括汇流接头,所述输液管包括清洗液管及汇流管,所述清洗液管的一端及汇流管的一端分别与所述汇流接头连接,所述汇流管的另一端连接所述注液嘴;所述清洁剂添加机构包括清洁剂储存箱及清洁剂管,所述清洁剂管的两端分别连接所述清洁剂储存箱及所述汇流接头。
16.可选地,所述第一控制阀设置在所述清洗液管上;所述清洁剂添加机构还包括第二液泵、第二控制阀及液位传感器,所述第二液泵及所述第二控制阀均设置在所述清洁剂管上,所述液位传感器设置在所述清洁剂储存箱内。
17.本技术还提供一种机器人工作站,包括前述任一项所述的加液装置。
18.本技术提供的机器人工作站的有益效果在于:与现有技术相比,通过设置对接防错机构,当注液嘴与清洁机器人的加液口错位对接时,感应棒伸出注液嘴的一端与清洁机器人发生碰触,使感应棒沿靠近输液管的方向移动,进而使感应棒的另一端撞击行程开关,行程开关被触发,机器人工作站基于行程开关的触发信号,控制第一控制阀处于关闭状态,此时无法通过输液管向清洁机器人添加清洗液,有效防止在注液嘴与清洁机器人的加液口未对接好的情况进行添加清洁液,而导致发生清洗液溢出的现象,有利于减少资源的浪费及减少充电线路短路的现象,有利于提高安全性。注液嘴从清洁机器人的加液口拔出后,弹性件驱动感应棒沿远离输液管的方向,使感应棒的一端与行程开关分开,另一端伸出注液嘴,以便进行下一次触发工作。
附图说明
19.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
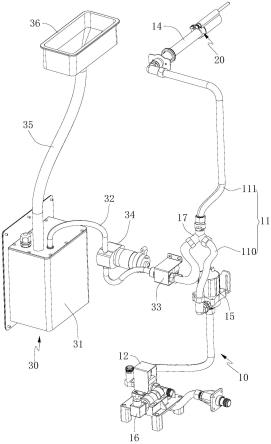
20.图1为本技术实施例提供的加液装置的结构示意图;
21.图2为图1所示的加液装置的对接防错机构的结构示意图;
22.图3为图2所示的对接防错机构的剖分结构示意图,其中省略保护罩。
23.其中,图中各附图标记:
24.10、清洗液添加机构;11、输液管;110、清洗液管;111、汇流管;12、第一控制阀;14、注液嘴;15、第一液泵;16、液压传感器;17、汇流接头;20、对接防错机构;21、感应棒;210、挡位片;22、行程开关;23、弹性件;24、套管;25、导向件;250、第一导向块;251、第二导向块;26、保护罩;30、清洁剂添加机构;31、清洁剂储存箱;32、清洁剂管;33、第二控制阀;34、第二液泵;35、补液管;36、漏斗。
具体实施方式
25.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
26.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
27.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
28.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
29.请一并参阅图1至图3,现对本技术实施例提供的加液装置进行说明。本技术的加液装置应用于机器人工作站上,机器人工作站用于对清洁机器人进行排污、加液及充电等服务。
30.加液装置包括清洗液添加机构10及对接防错机构20,对接防错机构20设置在清洗液添加机构10上。清洗液添加机构10包括输液管11、第一控制阀12及注液嘴14。第一控制阀12设置在输液管11上,注液嘴14与输液管11的一端连接,输液管11的另一端连接液源。对接防错机构20包括感应棒21、行程开关22及弹性件23。行程开关22固定设置在注液嘴14上,感应棒21活动设置在注液嘴14上,能够沿远离或靠近输液管11的方向移动。感应棒21的一端与行程开关22对应设置。弹性件23弹性抵接感应棒21,用于驱动感应棒21的另一端沿远离输液管11的方向伸出注液嘴14。
31.需要对清洁机器人添加清洗液时,输液管11远离注液嘴14的一端连接液源,将注液嘴14插入至清洁机器人的加液口内,当注液嘴14与清洁机器人的加液口准确无误地对接时,感应棒21不会与清洁机器人发生碰触而产生位移,从而行程开关22不被触发,机器人工作站控制第一控制阀12处于打开状态,从而能够通过输液管11向清洁机器人内添加清洁液,即液源流出的清洗液经输液管11流向注液嘴14,直至注入清洁机器人的储液箱内。
32.当注液嘴14与清洁机器人的加液口错位对接时,导致感应棒21伸出注液嘴14的一端与清洁机器人发生碰触,使感应棒21沿靠近输液管11的方向移动,使感应棒21与行程开
关22对应的一端撞击行程开关22,行程开关22被触发,机器人工作站基于行程开关22的触发信号,控制第一控制阀12处于关闭状态,从而无法通过输液管11向清洁机器人添加清洁液,则需要拔出注液嘴14,重新将注液嘴14插入至清洁机器人的加液口内,直至注液嘴14与清洁机器人的加液口准确无误地对接,在感应棒21沿靠近输液管11的方向移动过程中,感应棒21作用弹性件23,使弹性件23产生弹性形变,注液嘴14从清洁机器人的加液口拔出后,弹性件23回弹,以驱动感应棒21沿远离输液管11的方向,使感应棒21的一端与行程开关22分开,另一端伸出注液嘴14,使保持感应棒21的另一端处于伸出注液嘴14的状态。
33.本技术提供的加液装置,与现有技术相比,本技术的加液装置通过设置对接防错机构20,当注液嘴14与清洁机器人的加液口错位对接时,感应棒21伸出注液嘴14的一端与清洁机器人发生碰触,使感应棒21沿靠近输液管11的方向移动,进而使感应棒21的另一端撞击行程开关22,行程开关22被触发,机器人工作站基于行程开关22的触发信号,控制第一控制阀12处于关闭状态,此时无法通过输液管11向清洁机器人添加清洗液,有效防止在注液嘴14与清洁机器人的加液口未对接好的情况进行添加清洁液,而导致发生清洗液溢出的现象,有利于减少资源的浪费及减少充电线路短路的现象,有利于提高安全性。注液嘴14从清洁机器人的加液口拔出后,弹性件23驱动感应棒21沿远离输液管11的方向,使感应棒21的一端与行程开关22分开,另一端伸出注液嘴14,以便进行下一次触发工作。
34.需要说明的是,在本实施例中,清洗液为清水,液源为水源,第一控制阀12为电磁阀。
35.在一些实施例中,请参阅图1,清洗液添加机构10还包括第一液泵15,第一液泵15设置在输液管11上。第一液泵15用于输送输液管11内的清洁液。
36.在一些实施例中,还包括液压传感器16,液压传感器16设置在输液管11上。进一步地,液压传感器16设置在输液管11靠近液源的一端。液压传感器16用于感应液源的液压,若液源的液压过高,机器人工作站则会发出报警提示。
37.需要说明的是,注液嘴14远离输液管11的一端设有注液口,注液口设于注液嘴14的底面,注液嘴14内的清洁液经注液嘴14流出。
38.在一些实施例中,请一并参阅图1及图2,对接防错机构20还包括套管24及导向件25,套管24套设在注液嘴14上,导向件25设置在套管24的外部上,行程开关22设置在套管24的一端上,并靠近输液管11设置,感应棒21活动穿设在导向件25上,感应棒21上设置有挡位片210,弹性件23的两端分别与挡位片210及导向件25抵接。从而当注液嘴14与清洁机器人的加液口错位对接时,使得感应棒21的一端与清洁机器人的外壳发生碰触,从而促使感应棒21相对导向件25沿注液嘴14的轴向移动,使感应棒21的另一端撞击行程开关22,以触发行程开关22,挡位片210朝导向件25方向挤压弹性件23,使弹性件23压缩。
39.进一步地,套管24上设有通液口,通液口与注液口对应连通。
40.进一步地,导向件25包括第一导向块250及第二导向块251,第一导向块250及第二导向块251沿套管24的轴向间隔设置,且第一导向块250靠近行程开关22设置,第二导向块251远离行程开关22设置,即第二导向块251靠近注液口设置。感应棒21活动穿设于第一导向块250及第二导向块251,挡位片210设于第一导向块250与第二导向块251之间,弹性件23活动套设在感应棒21上,并设于挡位片210与第一导向块250之间,且弹性件23的两端分别抵接挡位片210及第一导向块250。通过将弹性件23活动套设在感应棒21上,有效保证弹性
件23伸缩运动的稳定性,有效防止弹性件23发生径向弯曲变形
41.可选的,弹性件23为螺旋弹簧。
42.在一些实施例中,在对接防错机构20还包括套管24及导向件25基础上,对接防错机构20还包括保护罩26及,保护罩26罩设于导向件25及弹性件23,套设在保护罩26及套管24靠近行程开关22的一端上,行程开关22设于内。通过保护罩26与的配合对导向件25、弹性件23及行程开关22进行罩设,有效避免导向件25、弹性件23及行程开关22受到外界的损伤,同时有利于保证对接防错机构20的美观性。
43.进一步地,保护罩26沿套管24的轴向滑设在套管24的外部上,保护罩26罩设于第一导向块250的部分、弹性件23及第二导向块251。可选的,第一导向块250及第二导向上设有导向条,导向条沿套管24的轴向延伸,保护罩26是上设有供导向条滑设的滑槽。当然,在其他实施例中,保护罩26也可以与套管24的外部固定连接。
44.套设在保护罩26及套管24靠近行程开关22的一端上,还套设在注液嘴14露出的部分上,第一导向块250设于内。可选的,靠近行程开关22的一端的内部设置有内卡条,套管24靠近行程开关22的一端的外部设置有外卡条,套管24上的外卡条与上的内卡条配合卡接,远离行程开关22的一端与机器人工作站的外壳对接。
45.在一些实施例中,请再次参阅图1,加液装置还包括清洁剂添加机构30,清洁剂添加机构30连接输液管11。清洁剂添加机构30能够通过输液管11对清洁机器人添加清洁剂。
46.具体地,清洗液添加机构10还包括汇流接头17,输液管11包括清洗液管110及汇流管111,清洗液管110的一端及汇流管111的一端均连接汇流接头17,清洗液管110的另一端连接液源,汇流管111的另一端连接注液嘴14。清洁剂添加机构30包括清洁剂储存箱31及清洁剂管32,清洁剂储存箱31用于储存清洁剂,清洁剂管32的两端分别连接清洁剂储存箱31及汇流接头17,从而清洁剂储存箱31内的清洁剂通过清洁剂管32流向汇流管111。
47.进一步地,液压传感器16、第一控制阀12及第一液泵15依次设置在清洗液管110上。清洁剂添加机构30还包括第二控制阀33、第二液泵34及液位传感器,第二液泵34及第二控制阀33均设置在清洁剂管32上,且第二液泵34设于第二控制阀33与清洁剂储存箱31之间。第二控制阀33用于导通或截止清洁剂管32。第二控制阀33用于抽取清洁剂储存箱31内的清洁剂至清洁剂管32内。液位传感器设置在清洁剂储存箱31内,液位传感器用于检测清洁剂储存箱31内的液位。
48.可选的,第二控制阀33为电磁阀。
49.在一些实施例中,清洁剂添加机构30还包括补液管35,补液管35的一端连接清洁剂储存箱31,并与清洁剂储存箱31内连通,补液管35的另一端连接有漏斗36。从而需要向清洁剂储存箱31补充清洁剂时,用户向漏斗36内注入清洁剂,漏斗36内的清洁剂通过补液管35流入至清洁剂储存箱31内。通过设置漏斗36,便于用户向补液管35内注入清洁剂。
50.本技术的加液装置通过设置对接防错机构20,当注液嘴14与清洁机器人的加液口错位对接时,使得感应棒21与清洁机器人发生碰触而沿注液嘴14的轴向产生位移,弹性件23被压缩,同时,产生位移的感应棒21撞击行程开关22,以使行程开关22被触发,机器人工作站控制第一控制阀12处于关闭状态,从而无法通过输液管11向清洁机器人添加清洗液,有效防止在注液嘴14与清洁机器人的加液口未对接好而发生清洗液溢出的现象,减少资源的浪费,同时还能减少充电线路发生短路的现象,有利于提高安全性。
51.本技术的加液装置通过设置清洁剂添加机构30,在对清洁机器人添加清洁液的同时,清洁剂添加机构30也一同对清洁机器人添加清洁剂,在储水箱内清洁液与清洁剂充分融合后,使清洁机器人对地面清洁尤其是脏污较严重的地面清洁具有非常好的清洁效果,同时通过在对清洁机器人添加清洁液的过程中,使清洁剂也一同进入到清洁机器人的储水箱,无需额外对清洁机器人添加清洁剂,避免清洁机器人在工作中再加清洁剂的问题。另外,清洁剂储存箱31内设置了液位感应传感器,通过液位感应传感器检测清洁剂储存箱31内的液位,能实时判断清洁剂储存箱31内的清洁剂是否用完,有效避免在对清洁机器人添加清水时未加入清洁剂的问题。
52.本技术还提供一种机器人工作站,包括上述加液装置。
53.本技术的机器人工作站在接收到加清洗液的指令时,注液嘴14插入至清洁机器人的加液口内,当注液嘴14与清洁机器人的加液口错位对接时,当注液嘴14与清洁机器人的加液口错位对接时,导致感应棒21伸出注液嘴14的一端与清洁机器人发生碰触,使感应棒21沿靠近输液管11的方向移动,使感应棒21与行程开关22对应的一端撞击行程开关22,行程开关22被触发,机器人工作站基于行程开关22的触发信号,控制第一控制阀12处于关闭状态,从而无法通过输液管11向清洁机器人添加清洁液,则需要拔出注液嘴14,重新将注液嘴14插入至清洁机器人的加液口内,直至注液嘴14与清洁机器人的加液口准确无误地对接,在感应棒21沿靠近输液管11的方向移动过程中,感应棒21作用弹性件23,使弹性件23产生弹性形变,注液嘴14从清洁机器人的加液口拔出后,弹性件23回弹,以驱动感应棒21沿远离输液管11的方向,使感应棒21的一端与行程开关22分开,另一端伸出注液嘴14,使保持感应棒21的另一端处于伸出注液嘴14的状态。
54.当注液嘴14与清洁机器人的加液口准确无误地对接时,感应棒21不会与清洁机器人发生碰触而产生位移,从而行程开关22不被触发,机器人工作站控制第一控制阀12处于打开状态,并启动第一液泵15,以使从液源流至清洗液管110内的清洁液,依次流经液压传感器16、第一控制阀12、第一液泵15、汇流接头17、汇流管111及注液嘴14,最后经注液嘴14注入清洁机器人的储液箱内。
55.在添加清洗液过程中,当机器人工作站在接收到加清洁剂的指令时,机器人工作站控制第二控制阀33处于打开状态,并启动第二液泵34,第二液泵34抽取清洁剂储存箱31内的清洁剂至清洁剂管32内,并使清洁剂管32内的清洁剂依次流经第二液泵34、第二控制阀33、汇流接头17、汇流管111及注液嘴14,最后经注液嘴14注入清洁机器人的储液箱内。
56.当清洁剂储存箱31内的清洁剂逐渐减少到预设液位时,清洁剂储存箱31内的液位传感器将被触发,机器人工作站根据液位传感器的触发信号,发出报警提示,以提醒用户需要向清洁剂储存箱31内补充加清洁剂。同时,清洁液添加工作也被暂停,有效避免在对清洁机器人添加清洁液时未加入清洁剂的问题。当清洁剂储存箱31装满清洁剂后,清洁液添加工作继续进行。
57.需要说明的是,机器人工作站还包括控制器,控制器与第一控制阀12、第一液泵15、液压传感器16、行程开关22、第二控制阀33、第二液泵34、液位传感器电连接,控制器用于控制第一液泵15、第二控制阀33及第二液泵34的工作运行,用于接收并处理液压传感器16、行程开关22、液位传感器的触发信号。
58.本技术提供的机器人工作站,与现有技术相比,通过设置对接防错机构20,当注液
嘴14与清洁机器人的加液口错位对接时,感应棒21伸出注液嘴14的一端与清洁机器人发生碰触,使感应棒21沿靠近输液管11的方向移动,进而使感应棒21的另一端撞击行程开关22,行程开关22被触发,机器人工作站基于行程开关22的触发信号,控制第一控制阀12处于关闭状态,此时无法通过输液管11向清洁机器人添加清洗液,有效防止在注液嘴14与清洁机器人的加液口未对接好的情况进行添加清洁液,而导致发生清洗液溢出的现象,有利于减少资源的浪费及减少充电线路短路的现象,有利于提高安全性。注液嘴14从清洁机器人的加液口拔出后,弹性件23驱动感应棒21沿远离输液管11的方向,使感应棒21的一端与行程开关22分开,另一端伸出注液嘴14,以便进行下一次触发工作。
59.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1