一种用于炒菜机器人的勾芡装置的制作方法
1.本实用新型涉及勾芡装置技术领域,具体为一种用于炒菜机器人的勾芡装置。
背景技术:
2.炒菜机器人,首先要将复杂的中国菜烹饪工艺与动作进行分解与定义,并用机器人专.业与烹饪专.业均能理解的语言进行描述;在此基础上,找出中国烹饪的核心工艺与核心动作; 之后设计机器人运动系统,包括锅具动作机构、送料机构、火控机构、出料机构等;研制出的机器人掌握中国烹饪工艺的“十八般武艺”,能顺溜地晃锅、颠勺、划散、倾倒,还能娴熟地炒、爆、煸、烧、熘等,机器人控制程序中,还融入中国烹饪大师的配方与经验,机器人自动炒菜机实现了炒菜过程的自动化,您只需轻轻一按,就可以享受到世界各地的地道美食,烹饪过程不粘不糊不溢、而且安全、节能、无油烟,炒菜过程中,锅体自动密封保鲜、菜肴营养美味正宗;
3.很多种菜肴的成功与否,在很大程度上与这道菜芡勾的如何密切相关,一道勾芡成功的菜肴具有光泽、滑润、柔嫩和鲜美等特点,而控制炒菜机器人上用来勾芡的机构,则被称为勾芡装置。
4.但是,现有的勾芡装置上只能够混合出一种类型的水淀粉,但是在现实中做菜时,需要根据菜肴的类型来选择倒入不同类型的水淀粉;因此,不满足现有的需求,对此我们提出了一种用于炒菜机器人的勾芡装置。
技术实现要素:
5.本实用新型的目的在于提供一种用于炒菜机器人的勾芡装置,以解决上述背景技术中提出的现有的勾芡装置上只能够混合出一种类型的水淀粉,但是在现实中做菜时,需要根据菜肴的类型来选择选择倒入不同类型的水淀粉等问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种用于炒菜机器人的勾芡装置,包括勾芡装置本体,所述勾芡装置本体上端面的五个端角均设有一个混合槽,所述勾芡装置本体下端面的五个端角均固定安装有一个全自动出水头,五个所述全自动出水头的内部分别与五个所述混合槽的内部相通;
7.所述勾芡装置本体的上方设有防护盖,所述防护盖下端面的五个端角均设有一个搅拌杆,五个所述搅拌杆的位置分别与五个所述混合槽的位置相互对应,所述防护盖上端面的中间位置固定安装有搅拌电机,所述搅拌电机下端面的中间位置连接有旋转轴a,所述旋转轴a外表面的下侧固定套设有齿轮a,所述齿轮a外表面的五个端角均连接有一个齿轮b,五个所述齿轮b同时与一个齿轮a之间齿槽相连,五个所述齿轮b分别套设于五个所述搅拌杆外表面的上侧;
8.所述勾芡装置本体外表面的一侧固定安装有升降装置外壳,所述升降装置外壳上面对勾芡装置本体的面的中间位置设有延伸至升降装置外壳内部的螺杆旋转槽,所述螺杆旋转槽的内部设有螺杆,所述螺杆下端面的中间位置连接有旋转轴b,所述旋转轴b的下端
连接有升降电机,所述螺杆外表面的上侧活动套设有内螺纹套,所述内螺纹套与防护盖之间设有一个连接块,所述连接块的两端分别与内螺纹套和防护盖之间固定相连。
9.优选的,所述搅拌电机与旋转轴a之间通过联轴器相连,所述旋转轴a与齿轮a之间通过承插固定相连。
10.优选的,所述旋转轴b与升降电机之间通过联轴器相连,所述旋转轴b与螺杆之间通过焊接相连。
11.优选的,所述螺杆的上端延伸至升降装置外壳外壳的内部,位于所述升降装置外壳外壳内部的螺杆与升降装置外壳之间通过滚子轴承相连。
12.优选的,所述内螺纹套的内螺纹与螺杆的外螺纹相匹配,所述螺杆与内螺纹套之间通过螺纹相连。
13.优选的,所述搅拌电机、升降电机和全自动出水头均与电源之间电性相连。
14.优选的,所述勾芡装置本体和防护盖整体采用透明材料一体化制成。
15.与现有技术相比,本实用新型的有益效果是:
16.1、本实用新型通过勾芡装置本体上端面的五个端角均设有一个混合槽,通过在五个混合槽的内部添加不同类型的淀粉和水源,之后在通过勾芡装置本体的加工的的话,就能过得到五种不同类型的水淀粉,大需要使用水淀粉时,打开对应的全自动出水头即可,通过此设计大幅度的增加了勾芡装置本体的多样性;
17.2、本实用新型通过齿槽结构和旋转结构的配合,从而使得只需要安装一个搅拌电机即可带动五个搅拌杆一同旋转,减少了设备的生产成本,同时通过螺纹结构和旋转结构的配合,从而可以自动调整防护盖的位置,当需要在混合槽的内部添加水源或淀粉时,无需手动拆卸和安装防护盖,通过此设计增加了设备的便捷性。
附图说明
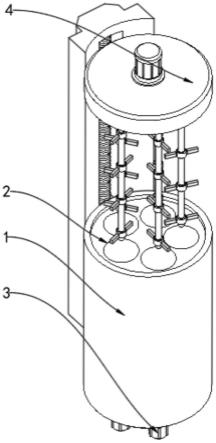
18.图1为本实用新型整体的结构示意图;
19.图2为本实用新型局部内视的整体结构侧视图;
20.图3为本实用新型图2中a处的结构放大图;
21.图4为本实用新型图2中b处的结构放大图。
22.图中:1、勾芡装置本体;2、混合槽;3、全自动出水头;4、防护盖;5、搅拌电机;6、旋转轴a;7、齿轮a;8、齿轮b;9、搅拌杆;10、升降装置外壳;11、螺杆旋转槽;12、螺杆;13、内螺纹套;14、连接块;15、旋转轴b;16、升降电机。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
24.本实用新型所提到的全自动出水头3(型号为d-3)、螺杆12(型号为304)和升降电机16(型号为rf370)可从市场采购或私人定制获得。
25.请参阅图1至图4,本实用新型提供的一种实施例:一种用于炒菜机器人的勾芡装置,包括勾芡装置本体1,勾芡装置本体1上端面的五个端角均设有一个混合槽2,勾芡装置
本体1下端面的五个端角均固定安装有一个全自动出水头3,五个全自动出水头3的内部分别与五个混合槽2的内部相通;使用时,连接电源,勾芡装置本体1上端面的五个端角均设有一个混合槽2,通过在五个混合槽2的内部倒入不同类型的淀粉在加入水源的,之后在通过搅拌杆9对其进行搅拌的话,就能过得到五种不同类型的水淀粉,位于混合槽2内部的水淀粉可以通过安装于设备底部的全自动出水头3进行排出,通过此设计大幅度的增加了设备的多样性;
26.勾芡装置本体1的上方设有防护盖4,勾芡装置本体1和防护盖4整体采用透明材料一体化制成,防护盖4下端面的五个端角均设有一个搅拌杆9,五个搅拌杆9的位置分别与五个混合槽2的位置相互对应,防护盖4上端面的中间位置固定安装有搅拌电机5,搅拌电机5下端面的中间位置连接有旋转轴a6,旋转轴a6外表面的下侧固定套设有齿轮a7,搅拌电机5与旋转轴a6之间通过联轴器相连,旋转轴a6与齿轮a7之间通过承插固定相连,齿轮a7外表面的五个端角均连接有一个齿轮b8,五个齿轮b8同时与一个齿轮a7之间齿槽相连,五个齿轮b8分别套设于五个搅拌杆9外表面的上侧;
27.勾芡装置本体1外表面的一侧固定安装有升降装置外壳10,升降装置外壳10上面对勾芡装置本体1的面的中间位置设有延伸至升降装置外壳10内部的螺杆旋转槽11,螺杆旋转槽11的内部设有螺杆12,螺杆12下端面的中间位置连接有旋转轴b15,旋转轴b15的下端连接有升降电机16,旋转轴b15与升降电机16之间通过联轴器相连,旋转轴b15与螺杆12之间通过焊接相连,螺杆12外表面的上侧活动套设有内螺纹套13,内螺纹套13的内螺纹与螺杆12的外螺纹相匹配,螺杆12与内螺纹套13之间通过螺纹相连,内螺纹套13与防护盖4之间设有一个连接块14,连接块14的两端分别与内螺纹套13和防护盖4之间固定相连,螺杆12的上端延伸至升降装置外壳10外壳的内部,位于升降装置外壳10外壳内部的螺杆12与升降装置外壳10之间通过滚子轴承相连。
28.进一步,搅拌电机5、升降电机16和全自动出水头3均与电源之间电性相连。
29.当需要旋转搅拌杆9时,启动搅拌电机5,通过搅拌电机5可以使与搅拌电机5之间通过联轴器相连的旋转轴a6旋转,旋转轴a6旋转时固定套设于旋转轴a6外表面的齿轮a7也会随之旋转,齿轮a7旋转时与之齿槽相连的五个齿轮b8也会随之旋转,由于五个齿轮b8分别套设于五个搅拌杆9外表面的上侧,所以当齿轮a7旋转时,五个搅拌杆9也会随之旋转,通过此设计只需安装一个搅拌电机5即可带动五个搅拌杆9一同旋转,从而减少了设备的生产成本;
30.当需要打开防护盖4在混合槽2的内部添加淀粉或水源时,启动升降电机16,通过升降电机16可以使与升降电机16之间通过联轴器相连的旋转轴b15旋转,旋转轴b15旋转时与之固定相连的螺杆12也会随之旋转,螺杆12旋转时套设于螺杆12外表面与之螺纹相连但是无法旋转的内螺纹套13将会在螺杆12的外表面上下移动,内螺纹套13在移动时与之通过连接块14而间接固定相连的防护盖4也会随之移动,通过此设计可以自动打开防护盖4或关闭防护盖4,从而减少了操作人员的操作繁琐性,当需要使用设备时,将其安装至对应的位置,之后在五个混合槽2的内部添加五种不同类型的淀粉,之后加入水源并且通过搅拌结构进行混合,当需要使用某种水淀粉时,打开对应的全自动出水头3即可。
31.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新
型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1