清洁设备及行驶轮的制作方法
1.本公开涉及清洁技术领域,特别涉及一种清洁设备;本公开还涉及一种能够应用于上述清洁设备的行驶轮。
背景技术:
2.随着智能化科技技术的不断发展与成熟应用,传统家居也在逐渐地往智能家居方向转型,扫地机器人就是智能家居电器中的一种,又可以称自动打扫机、智能吸尘器、机器人吸尘器、扫地机等,能凭借一定的人工智能自动在房间内运动并完成地面清理工作。
3.现在的家庭中各种家具和装饰形成了复杂的地面环境,各种障碍物如台阶、靠椅圆棒腿、移门滑轨等高低不平的地面环境严重限制了扫地机器人的运动范围,扫地机器人在自动清洁工作、返回基站以及其它使用场景中,会被各种障碍物困住,无法继续移动。
技术实现要素:
4.本公开为了解决现有技术中存在的问题,提供了一种清洁设备及行驶轮。
5.根据本公开的第一方面,提供了一种清洁设备,包括用于行走的行驶轮,所述行驶轮的周面上沿圆周方向间隔地设置有凸起结构,所述凸起结构包括靠近所述行驶轮其中一侧的第一凸起部,以及靠近所述行驶轮相对另一侧的第二凸起部,所述第一凸起部和第二凸起部在所述行驶轮的圆周方向上交错设置并且相互连接,以使所述凸起结构具有延伸至行驶轮相对两侧且连续的行驶面。
6.在本公开的一个实施例中,所述凸起结构行驶面的面积s1设置为10mm2≤s1≤200mm2。
7.在本公开的一个实施例中,所述凸起结构在所述行驶轮径向方向上的高度h设置为h≥0.2mm。
8.在本公开的一个实施例中,所述第一凸起部、第二凸起部的连接部分在所述行驶轮圆周方向上的长度l1设置为0.1mm≤l1≤30mm。
9.在本公开的一个实施例中,所述第一凸起部上的任意一点至所述第二凸起部上任意一点的距离l2设置为l2≤30mm。
10.在本公开的一个实施例中,所述凸起结构的数量设置为15至30个。
11.在本公开的一个实施例中,相邻所述凸起结构之间构成凹槽结构,所述凹槽结构包括位于相邻所述第一凸起部之间的第一凹槽,以及位于相邻所述第二凸起部之间的第二凹槽。
12.在本公开的一个实施例中,所述第一凹槽与所述第二凹槽在行驶轮圆周方向上交错布置,且二者在交错的位置连通。
13.在本公开的一个实施例中,所述第一凹槽、第二凹槽在所述行驶轮圆周方向上的宽度d1设置为0.15mm≤d1≤20mm。
14.在本公开的一个实施例中,所述行驶轮相对两侧的侧面上分别设置有多个沿着圆
周方向分布的压缩孔,所述压缩孔沿着所述行驶轮的轴向方向延伸。
15.在本公开的一个实施例中,所述压缩孔在所述行驶轮径向方向上的相对两端分别记为第一端、第二端,所述压缩孔第一端的尺寸大于所述第二端的尺寸;
16.所述压缩孔包括交替分布的第一压缩孔和第二压缩孔,所述第一压缩孔被构造为以第一端朝向行驶面的方式布置在所述行驶轮上;所述第二压缩孔构造为以第二端朝向行驶面的方式布置在所述行驶轮上。
17.在本公开的一个实施例中,相邻所述凸起结构之间构成凹槽结构,所述凹槽结构的槽底至所述压缩孔的距离x1设置为0.1mm≤x1≤10mm;和/或,所述压缩孔至所述行驶轮内侧的距离x2设置为0.1mm≤x2≤10mm。
18.在本公开的一个实施例中,所述压缩孔的横截面积s2设置为0.2mm2≤s2≤300mm2。
19.根据本公开的第二方面,还提供了一种行驶轮,所述行驶轮的周面上沿圆周方向间隔地设置有凸起结构,所述凸起结构包括靠近所述行驶轮其中一侧的第一凸起部,以及靠近所述行驶轮相对另一侧的第二凸起部,所述第一凸起部和第二凸起部在所述行驶轮的圆周方向上交错设置并且相互连接,以使所述凸起结构具有延伸至行驶轮相对两侧且连续的行驶面。
20.本公开的一个有益效果在于,行驶轮的凸起结构具有连接且交错设置的第一凸起部和第二凸起部,加强了结构强度和硬度,以使行驶轮能够更好的越过工作面上高低不平的障碍,并且,第一凸起部和第二凸起部连接构成了连续的行驶面,能够增加行驶面与工作面的接触面积,提高摩擦力,避免行驶轮在行走过程中打滑。
21.通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
附图说明
22.被结合在说明书中并构成说明书的一部分的附图示出了本公开的实施例,并且连同其说明一起用于解释本公开的原理。
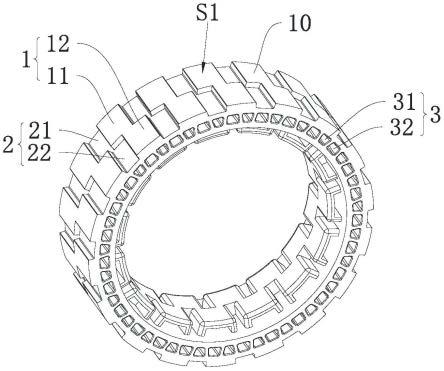
23.图1是本公开一实施例提供的行驶轮的整体结构示意图;
24.图2是本公开一实施例提供的行驶轮的侧视图;
25.图3是本公开一实施例提供的行驶轮的部分结构示意图。
26.图1至图3中各组件名称和附图标记之间的一一对应关系如下:
27.1、凸起结构;10、行驶面;11、第一凸起部;12、第二凸起部;2、凹槽结构;21、第一凹槽;22、第二凹槽;3、压缩孔;31、第一压缩孔;32、第二压缩孔。
具体实施方式
28.现在将参照附图来详细描述本公开的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本公开的范围。
29.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本公开及其应用或使用的任何限制。
30.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适
当情况下,所述技术、方法和设备应当被视为说明书的一部分。
31.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
32.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
33.在本文中,“上”、“下”、“前”、“后”、“左”、“右”等仅用于表示相关部分之间的相对位置关系,而非限定这些相关部分的绝对位置。
34.在本文中,“第一”、“第二”等仅用于彼此的区分,而非表示重要程度及顺序、以及互为存在的前提等。
35.在本文中,“相等”、“相同”等并非严格的数学和/或几何学意义上的限制,还包含本领域技术人员可以理解的且制造或使用等允许的误差。
36.除非另有说明,本文中的数值范围不仅包括其两个端点内的整个范围,也包括含于其中的若干子范围。
37.本公开提供了一种清洁设备,清洁设备可以是自移动清洁机器人、洗地机等,包括用于行走的行驶轮,能够在驱动力的作用下在工作面行走,清洁设备在行走过程中,通过清洁装置对工作面进行清洁。清洁装置可以是抹盘、滚筒、扫刷等。
38.行驶轮的周面上沿着圆周方向间隔地设置有凸起结构,凸起结构包括靠近行驶轮其中一侧的第一凸起,以及靠近行驶轮相对另一侧的第二凸起部,第一凸起部和第二凸起部在行驶轮的圆周方向上交错设置并且相互连接,以使凸起结构具有延伸至行驶轮相对两侧且连续的行驶面。
39.在清洁设备的工作过程,地面上的水渍、油污会导致清洁设备的行驶轮打滑,导致清洁设备无法正常工作。凸起结构使得行驶轮用于接触地面的周面凹凸不平,并且第一凸起部和第二凸起连接构成连续的行驶面,能够增加与地面的接触面积,提高摩擦力,避免行驶轮在行走过程中打滑。
40.清洁设备在工作过程还需要通过一些障碍,例如在家庭场景中,地面上的台阶、地毯、家具支脚、移门滑轨等高低不平的障碍会对清洁设备的行驶轮造成阻碍。凸起结构的第一凸起部和第二凸起部交错设置,并且连接在一起,加强了凸起结构的结构,以使凸起结构具有适当的硬度,有利于提高行驶轮的越障能力。
41.下面将结合具体结构对本公开的技术方案进行详尽的描述。
42.在本公开的一些实施方式中,清洁设备包括用于行走的行驶轮,行驶轮具体可以是清洁设备上有驱动力输入的驱动轮,也可以为无动力输入的轮子,例如辅助轮。
43.如图1所示,行驶轮的周面上设置有凸起结构1,凸起结构1沿着行驶轮的圆周方向间隔的分布。相邻的凸起结构1之间形成了凹槽结构2,行驶轮的周面构成凹凸不平的结构。
44.如图1、图2所示,凸起结构1包括第一凸起部11和第二凸起部12,第一凸起部11靠近行驶轮的其中一侧,第二凸起部12靠近行驶轮相对另一侧,并且第一凸起部11、第二凸起部12分别延伸至行驶轮的相应一侧的边缘。行驶轮的相对两侧为轴向方向上的两侧。将行驶轮的行驶方向定义为前方,其相对两侧是指行驶轮的左右两侧,第一凸起部11、第二凸起部12在行驶轮的周面上左右设置,并且,分别延伸至行驶轮左右两侧的边缘。
45.第一凸起部11和第二凸起部12在行驶轮的圆周方向上交错设置并且相互连接,并
且使凸起结构1具有延伸至行驶轮相对两侧且连续的行驶面10,行驶轮通过行驶面10在工作面上行走。连续的行驶面10能够使行驶轮在工作面上行走时更加平稳,并且连续的行驶面10面积更大,能够增加与工作面之间的摩擦力,不容易打滑,行驶轮的抓地能力更强。
46.行驶轮可以采用具有一定弹性的材料制造,例如塑胶等。当行驶轮的材料硬度较高时,遇到障碍会出现颠簸,不利于平稳行驶;当行驶轮的材料较软时,有利于在遇到障碍时平稳行驶,更好的越过障碍。行驶轮的凸起结构1具有一定的形变能力,有利于平稳行驶,第一凸起部11和第二凸起部12连接在一起有利于增加凸起结构1的强度,以使凸起结构1具有适当的硬度,有利于提高行驶轮的越障能力。
47.详细地,凸起结构1可以在行驶轮周面上均匀分布,第一凸起部11、第二凸起部12可以设置为矩形结构,第一凸起部11、第二凸起部12交错设置且连接构成的凸起结构1近似“z”性结构。在较佳的实施方式中,第一凸起部11、第二凸起部12设置为形状、大小完全相同,有利于摩擦力均匀分布,减轻磨损。
48.在本公开的一些实施方式中,行驶轮的行驶面10可以设置为光滑面,有利于行驶轮的平稳性,并且容易加工,成本较低。或者,行驶面10也可以设置为粗糙面,能够增加摩擦力,防止在行驶过程中打滑。
49.在本公开的一些实施方式中,以s1表示凸起结构1行驶面10的面积,行驶面10的面积s1设置为:10mm2≤s1≤200mm2,例如,20mm2、50mm2、100mm2等。行驶面10在轴向方向上延伸至行驶轮相对两侧的边缘,以使面积s1更大。限制行驶面10面积s1能够保证行驶面10具有足够的摩擦力,并且兼顾凹槽结构2的面积,保证行驶轮越过障碍的能力。
50.在较佳的实施方式中,行驶面10可以设置为弧面结构,受到地面挤压时发生形变。弧面结构的圆心与行驶轮的圆心重合,有利于行驶轮平稳地行走。
51.在本公开的一些实施方式中,如图3所示,以h表示凸起结构1在行驶轮径向方向上的高度,高度h设置为h≥0.2mm,例如0.3mm、0.5mm、1mm等。具体地,凸起结构1的高度h为行驶面10至凹槽结构2槽底在径向方向上的距离,高度h也可以表示凹槽结构2的深度。凸起结构1的高度h越高时形变能力越强,有利于提高行驶轮的抓地能力。
52.在本公开的一些实施方式中,如图2所示,以l1表示第一凸起部11、第二凸起部12的连接部分在行驶轮圆周方向上的长度,该连接部分长度l1设置为:0.1mm≤l1≤30mm,例如0.5mm、1mm、10mm、20mm等。
53.详细地,凸起结构1的第一凸起部11和第二凸起部12在行驶轮轴向方向上的投影部分重合,投影的重合部分对应第一凸起部11、第二凸起部12的连接部分。该连接部分长度l1越长,则凸起结构1的结构强度相对越大,但第一凸起部11、第二凸起部12的交错部分就越小,不利于行驶轮平稳行驶。限制长度l1能够保证凸起结构1的结构强度,并且使行驶轮平稳行驶。
54.在本公开的一些实施方式中,如图2所示,第一凸起部11上的任意一点至第二凸起部12上任意一点的距离l2设置为l2≤30mm,例如35mm、50mm、100mm等。详细地,第一凸起部11和第二凸起部12相距最远的顶角之间的距离最大,该距离设置为30
㎜
。
55.在本公开的一些实施方式中,凸起结构1的数量设置为15至30个。如图1所示,行驶轮上的凸起结构1设置有18个。
56.在本公开的一些实施方式中,如图1、图2所示,凹槽结构2在行驶轮的圆周方向上
间隔的分布。凹槽结构2包括位于相邻第一凸起部11之间的第一凹槽21,以及位于相邻第二凸起部12之间的第二凹槽22。行驶轮经过工作面上高低不平的障碍时,凸起的障碍能够进入凹槽结构2中,与凹槽结构2的内壁产生相互作用力,从而提高行驶轮的抓地能力。
57.在本公开的一些实施方式中,如图1、图2所示,凹槽结构2的第一凹槽21与第二凹槽22在行驶轮圆周方向上交错布置,且二者在交错的位置连通。详细地,第一凹槽21、第二凹槽22相互连通并且分别延伸至行驶轮相应一侧的边缘,第一凹槽21、第二凹槽22的连通处在轴向方向上贯通行驶轮的相对两侧。行驶轮遇到的障碍物将能够更多的卡入到贯通的凹槽结构2中,因此具有更好的越障能力。第一凹槽21和第二凹槽22的连通部分在行驶轮圆周方向上的距离是相邻两个凸起结构1之间的最短距离。第一凹槽21、第二凹槽22可以均设置为矩形,凹槽结构2近似“z”形结构。
58.在本公开的一些实施方式中,如图2所示,以d1为第一凹槽21、第二凹槽22在行驶轮圆周方向上的宽度,宽度d1设置为:0.15mm≤d1≤20mm,例如0.2、1mm、10mm等。宽度d1为相邻的第一凸起部11之间的最短距离,以及相邻的第二凸起部12之间的最短距离。限制第一凹槽21、第二凹槽22的宽度d1有利于障碍物进入,并且不过多的影响行驶面10的面积。较佳的,行驶面10在行驶轮圆周方向上的宽度大于凹槽结构2的宽度d1。
59.在本公开的一些实施方式中,如图1所示,行驶轮相对两侧的侧面上分别设置有多个沿着圆周方向分布的压缩孔3,压缩孔3沿着行驶轮的轴向方向延伸。压缩孔3能够增加行驶轮的形变能力。
60.详细地,压缩孔3靠近行驶轮周面上的凸起结构1和凹槽结构2,行驶轮在行走过程中,凸起结构1与地面接触并受到挤压,发生形变,压力能够沿着向上传递至压缩孔3,压缩孔3处的结构强度相对较弱,容易变形,进而能够使凸起结构1更容易变形。凸起结构1被挤压变形后,增加了行驶面10与地面的接触面积,从而增加了摩擦力,提高了行驶轮的抓地能力。较佳地,压缩孔3在行驶轮的两个侧面上均匀分布,以使不同凸起结构1受到挤压时发生的形变接近或相同,有利于提高行驶轮的稳定性。
61.详细地,行驶轮相对两侧的压缩孔3可以设置成相互连通的,或者可以设置为分隔的。行驶轮相对两侧的压缩孔3的位置可以在行驶轮轴向方向上正对,或者也可以在行驶轮轴向方向上错开。压缩孔3的横截面可以设置成圆形、多边形或其它形状,或者设置成近似于圆形、多边形或其它形状。本公开对此均不作限制。
62.在本公开的一些实施方式中,压缩孔3在行驶轮径向方向上的相对两端分别记为第一端、第二端,压缩孔3第一端的尺寸大于第二端的尺寸;压缩孔3包括交替分布的第一压缩孔31和第二压缩孔32,第一压缩孔31被构造为以第一端朝向行驶面10的方式布置在行驶轮上。第二压缩孔32构造为以第二端朝向行驶面10的方式布置在行驶轮上。
63.如图3所示,基于第一压缩孔31、第二压缩孔32的上述结构,第一压缩孔31和第二压缩孔32之间的部分相对倾斜于行驶轮的径向方向。行驶轮在地面行走,地面沿着行驶轮的径向方向挤压凸起结构,第一压缩孔31、第二压缩孔32之间的部分相对于径向方向的压力倾斜,在受到径向方向的压力时更容易发生变形,进而有利于凸起结构1发生变形。
64.第一压缩孔31和第二压缩孔32交替分布,有利于提高行驶轮的稳定性。较佳地,行驶轮上的所有第一压缩孔31绕行驶轮的轴线中心对称,所有第二压缩孔32绕行驶轮的轴线中心对称。
65.在本公开的另一些实施方式中,第一压缩孔31、第二压缩孔32可以设置为相同的形状、面积,也可以设置为不同的形状、面积。例如:第一压缩孔31横截面设置为三角形,第二压缩孔32横截面设置为梯形。
66.如图3所示的一种具体实施方式中,第一压缩孔31、第二压缩孔32横截面均设置为近似呈梯形,梯形的较宽一端为第一端,较窄一端为第二端。
67.在本公开的一些实施方式中,如图3所示,行驶轮具有内侧和外侧,行驶轮的外侧为行驶面10,行驶轮的内侧可以设置轮轴、轮毂等结构。以x1为凹槽结构2的槽底至压缩孔3的距离,距离x1设置为0.1mm≤x1≤10mm,例如0.2mm、1mm、5mm等。和/或,以x2为压缩孔3至行驶轮内侧的距离,距离x2设置为0.1mm≤x2≤10mm,例如0.2mm、1mm、5mm等。压缩孔3至凸起结构1的距离影响凸起结构1的形变能力,当距离较近时凸起结构1相对更容易变形,距离较远时凸起结构1相对不易变形,限制x1、x2的范围能够将凸起结构1的形变能力限制在合适的范围内。
68.在本公开的一些实施方式中,以s2为压缩孔3的横截面积,横街面积s2设置为:0.2mm2≤s2≤300mm2,例如0.5mm2、10mm2、100mm2等。压缩孔3横截面积的大小对凸起结构1的形变能力造成影响,横街面积s2越大则凸起结构1相对更容易变形,横街面积s2越大则凸起结构1相对不易变形,限制横街面积s2的范围能够将凸起结构1的形变能力限制在合适的范围内。
69.本公开还提供了一种行驶轮,行驶轮可以应用于清洁设备上,例如扫地机器人、自移动洗地机等,也可以应用在其它需要行走的设备上,例如运输机器人、巡检机器人等。行驶轮的周面上沿圆周方向间隔地设置有凸起结构,所述凸起结构包括靠近所述行驶轮其中一侧的第一凸起部,以及靠近所述行驶轮相对另一侧的第二凸起部,所述第一凸起部和第二凸起部在所述行驶轮的圆周方向上交错设置并且相互连接,以使所述凸起结构具有延伸至行驶轮相对两侧且连续的行驶面。
70.本公开的行驶轮具体结构和原理等参照上述清洁设备的行驶轮,本公开在此不再赘述。
71.下面结合具体应用场景,对本公开采用的技术方案进行说明,以帮助理解。
72.应用场景
73.清洁设备通过行驶轮在地面上行走,通过清洁装置对地面进行清洁,行驶轮的凸起结构1与地面接触,并且在地面的相对压力作用下被挤压变形。
74.清洁设备在工作过程中遇到水渍、油污时,由于第一凸起部和第二凸起连接构成连续的行驶面能够增加与地面的接触面积,具有较好的抓地能力,因此行驶轮不会在行走过程中打滑。
75.行驶轮遇到地面上高低不平的障碍时,例如台阶、移门滑轨,
76.凸起结构1的第一凸起部11和第二凸起部12交错设置,并且连接在一起,加强了凸起结构的结构,以使凸起结构具有适当的硬度,有利于提高行驶轮的越障能力。并且障碍物能够进入凹槽结构2中,进一步增加接触面积,加强摩擦力。行驶轮的压缩孔3在凸起结构1受到挤压时也受压变形,增加凸起结构1的变形程度,从而进一步提高越障能力,因此行驶轮能够顺利的越过障碍,继续进行清洁工作。
77.以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也
不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。本公开的范围由所附权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1