清洁机器人的制作方法
本技术涉及一种清洁机器人,属于清洁机器人。
背景技术:
1、清洁机器人在工作过程中,其用于光学定位的光学测距模块(激光雷达)需要进行旋转,使用激光源发射激光束,再使用光学敏感器件采集激光束照射在障碍物上的反射光,通过飞行时间法计算清洁机器人与障碍物的距离,以实现对清洁机器人周围环境的探测。
2、现有激光雷达为一体设计,测距组件外部套设有密封罩,避免水汽和灰尘进入测距组件导致发光和收光受到影响。激光雷达的外部还固定有将激光雷达密封在清洁机器人顶盖上的罩体,一方面对激光雷达进行保护,避免激光雷达与其它物品碰撞,另一方面进一步防止灰尘等脏污物进入罩体内。但是,这样的设计,一方面使得激光需要穿过两层罩体向外射出,反射的激光也需要穿过两层罩体进入接收光路,激光强度被削弱,甚至接收光路无法接收到反射的激光;另一方面,使得激光雷达的高度较高,在清洁机器人运行的过程中,很容易与其它物品发生碰撞而导致激光雷达损坏。
3、为了便于激光向外射出,通常会在罩体上设置供光路穿过的透明件,然而,由于透明件的外形呈圆形且在竖直方向上垂直于发射光路,因而在水平方向上会与发射光路形成一定倾角,当激光经过透明件时,会有一部分反射激光进入接收光路,从而影响测量精度。
4、有鉴于此,确有必要提出一种清洁机器人,以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种清洁机器人,以解决现有清洁机器人的顶盖高度较高以及激光强度被削弱的问题。
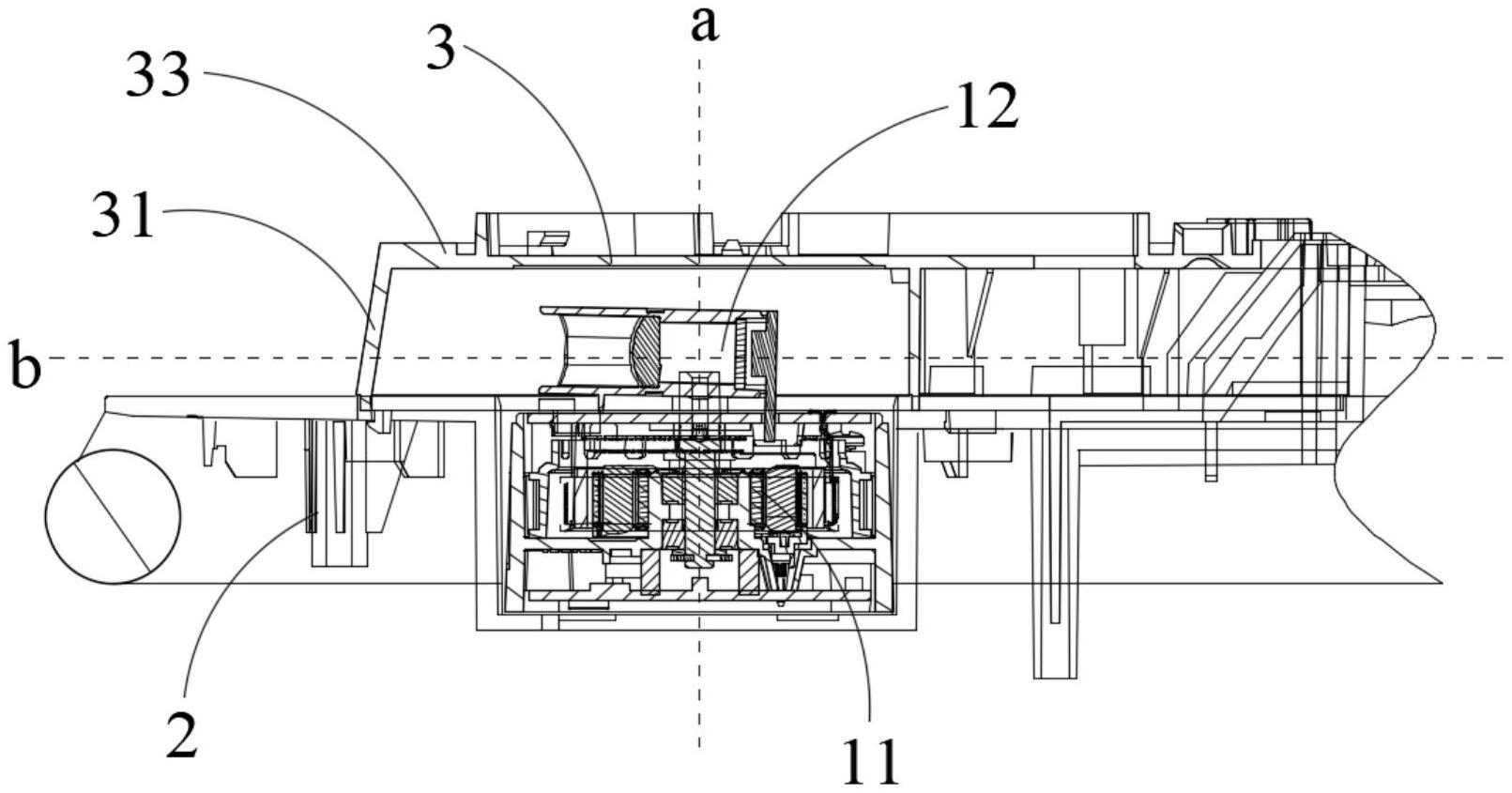
2、为实现上述目的,本实用新型提供了一种清洁机器人,包括顶盖和安装在所述顶盖上的激光雷达,所述顶盖包括壳体和组装在所述壳体上的透明罩,所述壳体上设有供安装激光雷达的安装部,所述透明罩罩设在所述激光雷达的外侧并与所述安装部连接,所述透明罩包括与所述安装部连接并呈弧形设置的透明件,所述激光雷达包括光发射器,且所述光发射器发射至所述顶盖外部的激光仅穿过所述透明件。
3、作为本实用新型的进一步改进,所述激光雷达包括测距组件,所述透明件相对于所述测距组件的旋转轴线呈倾斜设置。
4、作为本实用新型的进一步改进,所述透明件与所述测距组件的旋转轴线之间的夹角为8°~10°,所述透明件呈u型设置且围设在所述测距组件的外侧。
5、作为本实用新型的进一步改进,所述透明件的透光率大于90%。
6、作为本实用新型的进一步改进,所述透明件设有连接边,所述安装部上对应设有凹槽,所述连接边收容在所述凹槽内,以连接所述透明罩和所述壳体。
7、作为本实用新型的进一步改进,所述透明件还设有自所述连接边向外伸出的卡接件,所述凹槽内对应开设有卡接孔,所述卡接件伸入所述卡接孔内并与所述卡接孔的边缘抵接,以卡扣连接所述透明罩和所述壳体。
8、所述激光雷达包括测距组件,所述光发射器安装于所述测距组件,所述透明罩还包括与所述透明件连接的顶壁,所述透明件和所述顶壁共同围设形成一容置腔,所述测距组件收容在所述容置腔内并能够在所述容置腔内转动。
9、作为本实用新型的进一步改进,所述激光雷达还包括驱动组件,所述驱动组件与所述测距组件连接并能够驱动所述测距组件转动,所述安装部包括自所述壳体的外表面向内凹陷的收容槽以及形成于所述收容槽的内侧壁上的凸筋,所述驱动组件收容在所述收容槽内,并使得所述驱动组件的外侧壁与所述凸筋抵接。
10、作为本实用新型的进一步改进,所述收容槽内还设有固定柱,所述驱动组件上对应设有固定孔,所述壳体还包括固定件,所述固定件穿过所述固定孔并与所述固定柱锁紧,以固定连接所述驱动组件和所述安装部。
11、作为本实用新型的进一步改进,所述固定柱设有两个且相对设置于所述收容槽的对角处,所述固定孔也设有两个,以与两个所述固定柱一一对应。
12、本实用新型的有益效果是:本实用新型的清洁机器人通过将光发射器发射至顶盖外部的激光设置为仅穿过透明件,减少了激光在穿透透明件时的激光损失,提高了清洁机器人对周围环境感应的灵敏度,同时,测距组件的外侧未套设密封罩,降低了激光雷达的高度,提高了移动机器人的通过率。
技术特征:
1.一种清洁机器人,包括顶盖和安装在所述顶盖上的激光雷达,其特征在于:所述顶盖包括壳体和组装在所述壳体上的透明罩,所述壳体上设有供安装激光雷达的安装部,所述透明罩罩设在所述激光雷达的外侧并与所述安装部连接,所述透明罩包括与所述安装部连接并呈弧形设置的透明件,所述激光雷达包括光发射器,且所述光发射器发射至所述顶盖外部的激光仅穿过所述透明件。
2.根据权利要求1所述的清洁机器人,其特征在于:所述激光雷达包括测距组件,所述透明件相对于所述测距组件的旋转轴线呈倾斜设置。
3.根据权利要求2所述的清洁机器人,其特征在于:所述透明件与所述测距组件的旋转轴线之间的夹角为8°~10°,所述透明件呈u型设置且围设在所述测距组件的外侧。
4.根据权利要求1所述的清洁机器人,其特征在于:所述透明件的透光率大于90%。
5.根据权利要求1所述的清洁机器人,其特征在于:所述透明件设有连接边,所述安装部上对应设有凹槽,所述连接边收容在所述凹槽内,以连接所述透明罩和所述壳体。
6.根据权利要求5所述的清洁机器人,其特征在于:所述透明件还设有自所述连接边向外伸出的卡接件,所述凹槽内对应开设有卡接孔,所述卡接件伸入所述卡接孔内并与所述卡接孔的边缘抵接,以卡扣连接所述透明罩和所述壳体。
7.根据权利要求1所述的清洁机器人,其特征在于:所述激光雷达包括测距组件,所述光发射器安装于所述测距组件,所述透明罩还包括与所述透明件连接的顶壁,所述透明件和所述顶壁共同围设形成一容置腔,所述测距组件收容在所述容置腔内并能够在所述容置腔内转动。
8.根据权利要求7所述的清洁机器人,其特征在于:所述激光雷达还包括驱动组件,所述驱动组件与所述测距组件连接并能够驱动所述测距组件转动,所述安装部包括自所述壳体的外表面向内凹陷的收容槽以及形成于所述收容槽的内侧壁上的凸筋,所述驱动组件收容在所述收容槽内,并使得所述驱动组件的外侧壁与所述凸筋抵接。
9.根据权利要求8所述的清洁机器人,其特征在于:所述收容槽内还设有固定柱,所述驱动组件上对应设有固定孔,所述壳体还包括固定件,所述固定件穿过所述固定孔并与所述固定柱锁紧,以固定连接所述驱动组件和所述安装部。
10.根据权利要求9所述的清洁机器人,其特征在于:所述固定柱设有两个且相对设置于所述收容槽的对角处,所述固定孔也设有两个,以与两个所述固定柱一一对应。
技术总结
本技术提供了一种清洁机器人。包括顶盖和安装在顶盖上的激光雷达,顶盖包括壳体和组装在壳体上的透明罩,壳体上设有供安装激光雷达的安装部,透明罩罩设在激光雷达的外侧并与安装部连接,透明罩包括与安装部连接并呈弧形设置的透明件,激光雷达包括光发射器,且光发射器发射至顶盖外部的激光仅穿过透明件。本技术的清洁机器人通过将光发射器发射至顶盖外部的激光设置为仅穿过透明件,减少了激光在穿透透明件时的激光损失;同时,测距组件的外侧未套设密封罩,降低了激光雷达的高度,提高了移动机器人的通过率。
技术研发人员:李勋亮
受保护的技术使用者:深圳市杉川机器人有限公司
技术研发日:20221207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!