基站装置及清洁机器人的制作方法
本技术涉及扫地清洁机器人,特别是涉及一种基站装置及清洁机器人。
背景技术:
1、清洁机器人由微电脑控制,可实现自动导航并对地面进行清扫和吸尘,与传统人工清扫方式相比,有利于解放双手,节省时间。随着清洁机器人的普及,部分清洁机器人配备了独立的自服务基站,基站是用于对清洁机器人提供充电、清洁等服务的设备,清洁机器人在清洁过程中,能够自动回到基站进行污水的排放、补水、充电、吸尘等操作,对清洁机器人下一次的清洁进行补给准备。
2、传统技术中,清洁机器人在进入基站过程中,通过光、磁等原理进行导向,但是部分机器人回到基站后,尾部在基站为腾空状态,由于机器人本体重量较重,回到基站时与导向机构对接后长时间受力有断裂和变形风险,影响使用寿命。
技术实现思路
1、基于此,有必要提供一种基站装置及清洁机器人,能够有效提高基站装置内导向结构的使用寿命。
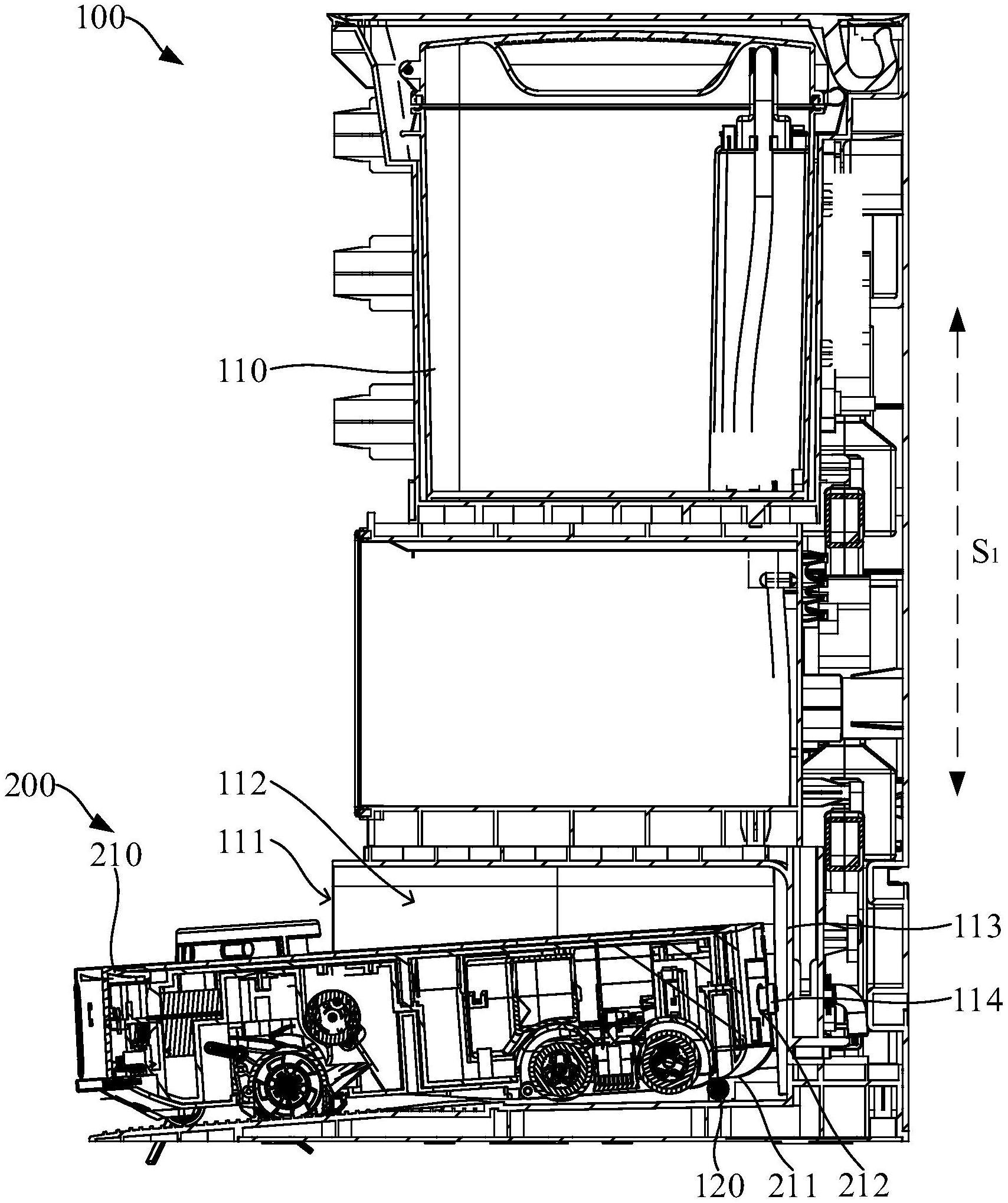
2、其技术方案如下:一种基站装置,所述基站装置包括:基站本体,所述基站设有具有开口的容纳腔,所述容纳腔用于容纳机器人本体,所述容纳腔的开口为进出口,所述机器人本体能够通过所述进出口进出所述容纳腔;支撑组件,所述支撑组件设置于所述容纳腔的腔壁上,且所述支撑组件用于与所述机器人本体支撑配合,述支撑组件用于给所述机器人本体提供沿第一方向的支撑力,所述第一方向与水平面呈夹角设置。
3、上述基站装置,在工作过程中,机器人本体通过进出口进入容纳腔,在机器人本体进入过程中,设置在容纳腔腔壁上的支撑组件与机器人本体接触,并对机器人本体起支撑作用,其支撑力沿第一方向,使得第一方向的至少一部分力能够与机器人本体的重力方向抵消,从而减少机器人本体对接后导向机构的受力,有利于减少导向机构对接后的断裂和变形风险,提高清洁机器人的使用寿命。
4、在其中一个实施例中,所述支撑组件包括支撑座与滚动件,所述支撑座设置于所述容纳腔的底壁上,所述滚动件与所述支撑座转动连接,所述滚动件相对所述支撑座朝向所述容纳腔的顶壁凸起设置,所述滚动件用于支撑所述机器人本体。
5、在其中一个实施例中,所述滚动件设有转轴,所述转轴的轴向与所述机器人本体的进出方向垂直,所述滚动件绕所述转轴转转动,所述支撑座设有支撑槽,所述转轴与所述支撑槽卡接。
6、在其中一个实施例中,所述支撑组件沿第二方向设置于所述容纳腔的中心位置,所述第二方向与所述第一方向垂直。
7、在其中一个实施例中,所述容纳腔的腔壁包括与所述进出口相对设置的对接壁,所述支撑组件到所述对接壁的距离小于所述支撑组件到所述进出口的距离。
8、在其中一个实施例中,所述支撑组件为至少两个,至少两个所述支撑组件间隔设置于所述容纳腔的底壁上,至少两个所述支撑组件均用于与机器人本体抵触配合。
9、在其中一个实施例中,所述支撑组件为两个,两个所述支撑组件沿所述基站本体的中线z1对称设置,所述中线z1为所述基站本体高度方向的对称轴。
10、在其中一个实施例中,沿第二方向,两个所述支撑组件之间的距离d1与所述机器人本体最大宽度w1满足:1/2w1≤d1≤2/3w1。
11、一种清洁机器人,所述清洁机器人包括机器人本体及上述中任意一项所述的基站装置。
12、上述清洁机器人,在工作过程中,机器人本体通过进出口进入容纳腔,在机器人本体进入过程中,设置在容纳腔腔壁上的支撑组件与机器人本体接触,并对机器人本体起支撑作用,其支撑力沿第一方向,使得第一方向的至少一部分力能够与机器人本体的重力方向抵消,从而减少机器人本体对接后导向机构的受力,有利于减少导向机构对接后的断裂和变形风险,提高清洁机器人的使用寿命。
13、在其中一个实施例中,所述机器人本体上设有对接口,所述容纳腔的腔壁包括设有与所述对接口相对设置的对接壁,所述对接壁上设有对接件,所述机器人本体进入所述容纳腔时,所述对接件与所述对接口对接,且所述对接口到所述机器人本体底壁的距离小于所述对接件到所述容纳腔底壁的距离。
14、在其中一个实施例中,所述机器人本体靠近所述对接壁的一端设有导向部,且所述机器人本体的底壁通过所述导向部与所述机器人本体靠近所述对接壁的侧壁过渡连接,所述机器人本体进入所述容纳腔时,所述导向部将所述支撑组件导向至所述机器人的底壁。
技术特征:
1.一种基站装置,其特征在于,所述基站装置包括:
2.根据权利要求1所述的基站装置,其特征在于,所述支撑组件包括支撑座与滚动件,所述支撑座设置于所述容纳腔的底壁上,所述滚动件与所述支撑座转动连接,所述滚动件相对所述支撑座朝向所述容纳腔的顶壁凸起设置,所述滚动件用于支撑所述机器人本体。
3.根据权利要求2所述的基站装置,其特征在于,所述滚动件设有转轴,所述转轴的轴向与所述机器人本体的进出方向垂直,所述滚动件绕所述转轴转转动,所述支撑座设有支撑槽,所述转轴与所述支撑槽卡接。
4.根据权利要求1所述的基站装置,其特征在于,所述支撑组件沿第二方向设置于所述容纳腔的中心位置,所述第二方向与所述第一方向垂直;和/或,
5.根据权利要求1所述的基站装置,其特征在于,所述支撑组件为至少两个,至少两个所述支撑组件间隔设置于所述容纳腔的底壁上,至少两个所述支撑组件均用于与机器人本体抵触配合。
6.根据权利要求5所述的基站装置,其特征在于,所述支撑组件为两个,两个所述支撑组件沿所述基站本体的中线z1对称设置,所述中线z1为所述基站本体高度方向的对称轴。
7.根据权利要求5所述的基站装置,其特征在于,沿第二方向,两个所述支撑组件之间的距离d1与所述机器人本体最大宽度w1满足:1/2w1≤d1≤2/3w1。
8.一种清洁机器人,其特征在于,所述清洁机器人包括机器人本体及权利要求1-7中任意一项所述的基站装置。
9.根据权利要求8所述的清洁机器人,其特征在于,所述机器人本体上设有对接口,所述容纳腔的腔壁包括与所述对接口相对设置的对接壁,所述对接壁上设有对接件,所述机器人本体进入所述容纳腔时,所述对接件与所述对接口对接,且所述对接口到所述机器人本体底壁的距离小于所述对接件到所述容纳腔底壁的距离。
10.根据权利要求9所述的清洁机器人,其特征在于,所述机器人本体靠近所述对接壁的一端设有导向部,且所述机器人本体的底壁通过所述导向部与所述机器人本体靠近所述对接壁的侧壁过渡连接,所述机器人本体进入所述容纳腔时,所述导向部将所述支撑组件导向至所述机器人的底壁。
技术总结
本技术涉及一种基站装置及清洁机器人,所述基站装置包括:基站本体,所述基站设有具有开口的容纳腔,所述容纳腔用于容纳机器人本体,所述容纳腔的开口为进出口,所述机器人本体能够通过所述进出口进出所述容纳腔;支撑组件,所述支撑组件设置于所述容纳腔的腔壁上,且所述支撑组件用于与所述机器人本体支撑配合。上述基站装置,在机器人本体进入过程中,设置在容纳腔腔壁上的支撑组件与机器人本体接触,并对机器人本体起支撑作用,其支撑力沿第一方向,使得第一方向的至少一部分力能够与机器人本体的重力方向抵消,从而减少机器人本体对接后导向机构的受力,有利于减少导向机构对接后的断裂和变形风险,提高清洁机器人的使用寿命。
技术研发人员:刘宇莹,林海利,李健,冯煜湛,雒千,阮传龙
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:20221220
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!