一种三调节式椅架的制作方法
本发明涉及可调节按摩座椅的椅架,具体涉及一种三调节式椅架。
背景技术:
1、由于按摩椅市场上产品琳琅满目,目前市场上的按摩椅大多是座部和背部成一定角度不能变化,也有一些座部和背部可以柔性的变化角度,但是变化角度范围小,使用者在按摩过程中基本保持一定的姿势不动,功能上单一;因此就其功能实现,尤其是依赖的椅架实现靠背水平放置,腿托、座垫水平放置,座垫角度调节,均无法实现这些旋转位置;
2、于座椅属于高频次使用的日常用品,就可调节座姿来说:目前有座椅靠背可调节,腿托可调节,座垫高度可调的;其中的调节采用电动推杆及气弹簧锁止及手动齿轮锁止调节均有涉及如按摩椅,靠背可调,腿托也可调;现有技术一种可调节座垫角度的按摩椅车架,cn217286422u:其公开了电动推杆调节腿托、靠背、座垫,但是其旋转方式均为:铰接+伸缩驱动的旋转,受制于结构布局,其存在如下问题:靠背无法水平,无法突破实现水平放置,受制于这种伸缩驱动+铰接旋转,以及布置空间的问题;无法实现水平放置,一旦实现水平,即该结构位于连杆机构的死点,使其卡死或者运动出现不确定性;因此,目前市场上可调节靠背只能接近于水平,腿托和座垫也无法旋转至一个平面,座垫一般是无法调节旋转的;
3、而如果说考虑预先调整,通过整体的旋转的角度消除靠背和水平位置的角度,则存在牺牲了靠背的初始角度问题,导致出现初始靠背倾角过大的问题,或者由于这种旋转始终无法使伸缩机构和靠背出于同一水平面,导致需要很大的下部空间使伸缩驱动形成的旋转,可以获得较大的可调节角度范围;
4、座垫无法达到90度旋转,也无法随靠背一起运动,由于座垫铰接于底架,一般无法把驱动座垫骨架旋转的伸缩机构置于和座垫骨架一个水平面;且其伸缩端连接在座垫前侧,同样的类似于连杆机构的死点,也就是常规的驱动设置在座垫骨架下方,无法旋转实现至直角的位置;座垫和靠背是独立的两个机构,两者通过铰接,各自独立运动;
5、腿托旋转由于是铰接+伸缩驱动,伸缩驱动设置在座垫上,因此也受制于连杆机构的死点位置,无法避免卡死及运动的不确定性,导致腿托和座垫上方夹角无法达到水平,或小于平角。
6、现有的座椅无法结合瑜伽姿势进行结合训练,瑜伽姿势需要较大的肌肉力量才能进行训练,而现有座椅无法结合瑜伽姿势,而且无法提供辅助力量训练。
技术实现思路
1、有鉴于此,针对现有技术的不足,本发明的目的在于提供一种腿托和座架实现水平或负角度,座垫骨架可调节0-90度旋转,靠背骨架可旋转至水平位置,座垫骨架随靠背骨架一起运动调整,获得更多的座椅姿态的三调节式椅架。
2、本技术旨在解决背景技术中的问题之一。
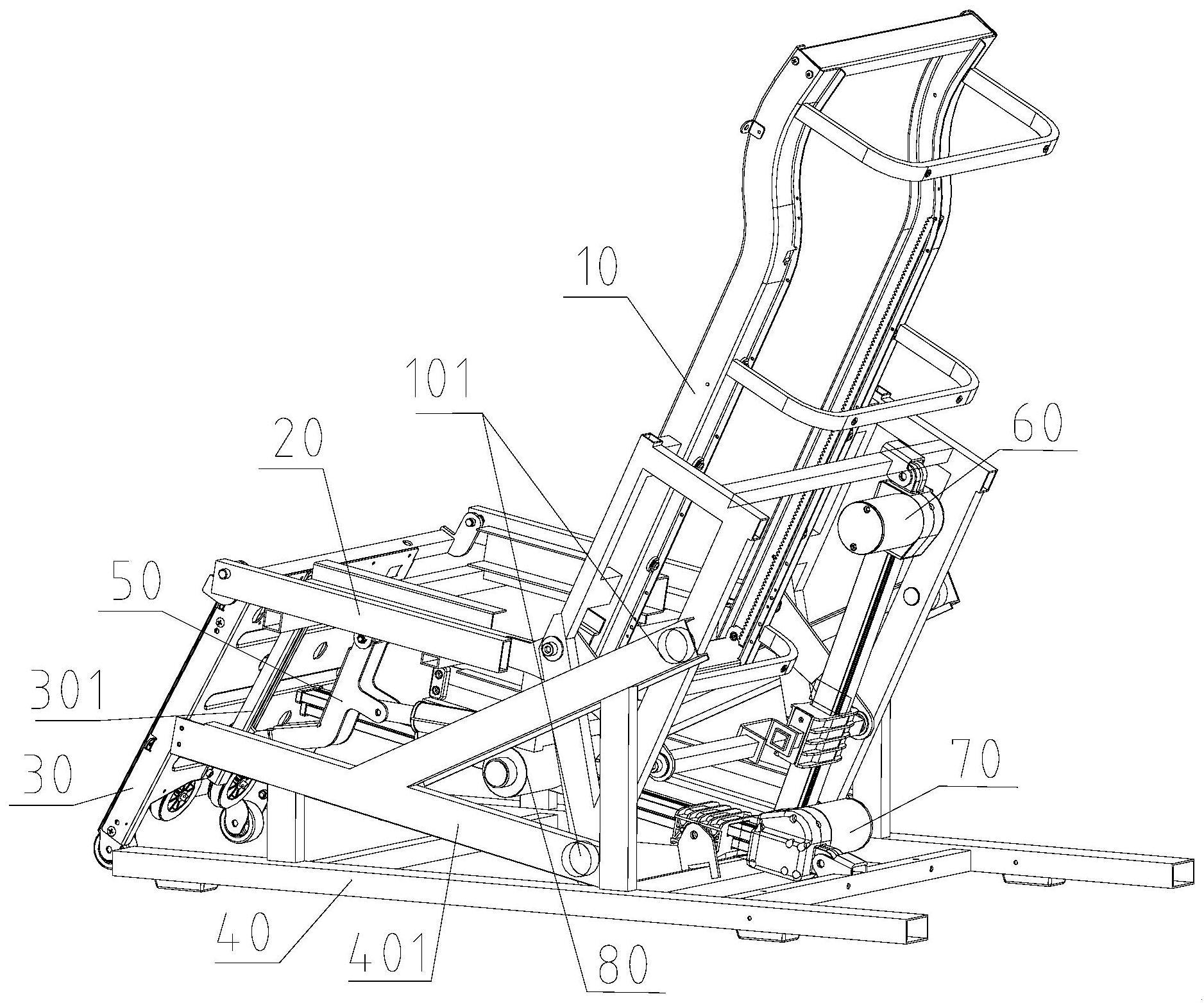
3、本发明所采用的技术方案为:为实现上述目的及其他相关目的,本发明提供一种可调节的背架,包括背架,背架的下部两侧均设置有两个滑动轮,滑动轮配合设置在y型的滑槽内,且滑动轮在滑槽内的至少有一个位置的使背架后仰旋转至水平。
4、本技术提供的一种技术方案,还具有以下技术特征:
5、优选的,滑动轮的圆心、背架铰接座架的圆心,在投影及垂直剖面上的点,组成三角形。
6、优选的,滑动轮设置在倒l型骨架上,倒l型骨架的短端垂直连接背架。
7、优选的,滑动轮设置在背架后侧。
8、优选的,滑动轮平行背架的腰部骨架。
9、优选的,滑动轮的轴心组成的平面平行背架的腰部骨架。
10、优选的,滑动轮的轴心和背架铰接座架的轴心平行。
11、优选的,滑槽设置在底架上。
12、优选的,背架的推杆ⅱ一端通过铰接限位设置形成旋转副,推杆ⅱ的移动端连接背架的下端梁。
13、优选的,推杆ⅱ的一端铰接底架。
14、一种可调节的座架,包括座架,座架铰接背架,座架靠背后侧延伸端铰接异形梁,异形梁连接推杆ⅰ的移动端,推杆ⅰ铰接在背架上,异形梁设置一豁口,豁口用于避免和推杆ⅱ干涉。
15、优选的,豁口为矩形。
16、优选的,豁口为板材拼接组成。
17、一种可调节的腿托,包括腿架,腿架铰接座架,腿架、座架的上方工作面的初始位置夹角大于平角,且不大于优角,腿架上设置有滑轨,滑轨沿腿架和座架的中心设置;滑轨上设置滑块,滑轨的滑块、座架、推杆ⅲ均铰接支架,支架为v型且夹角为钝角;
18、支架的短端铰接滑轨,支架的长端铰接座架,推杆ⅲ铰接支架的长端的中部的凸起耳片;座架的铰接处设置凸起耳片避免运动干涉;推杆ⅲ推动支架使腿架相对座架旋转,使腿架、座架的上方工作面的夹角小于或等于平角。
19、一种三调节式椅架,包括可调节的腿托、可调节的座架、可调节的背架,调节推杆ⅰ、推杆ⅱ、推杆ⅲ,使椅架从初始正常座椅姿态调整为:v型、l型、z型、7型、一型;
20、初始正常座椅姿态:推杆ⅰ的移动端在t0位置,推杆ⅱ的移动端在p1位置,推杆ⅲ的移动端在s位置;
21、v型座椅姿态:推杆ⅲ的移动端在t位置,推杆ⅰ的移动端在t0、t2之间任一位置,含t0、t2位置,且t0、t2对应v型夹角大小;推杆ⅱ的移动端在p1、p2之间不同位置,包含p1、p2位置,对应v型座椅姿态和水平面不同夹角;
22、l型座椅姿态:推杆ⅰ的移动端在t0位置,推杆ⅲ的移动端在t位置,推杆ⅱ的移动端在p2位置;推杆ⅱ的移动端的移动使l型座姿整体旋转,l型座椅姿态和水平面处于不同夹角;推杆ⅰ的移动端滑动使l型座椅姿态的l型的夹角不同;
23、z型座椅姿态:推杆ⅰ的移动端在t0位置,推杆ⅲ的移动端在s位置,推杆ⅱ的移动端在p2位置;
24、7型座椅姿态:推杆ⅰ的移动端在t1位置,推杆ⅲ的移动端在s位置,推杆ⅱ的移动端在p2位置;
25、一型座椅姿态:推杆ⅰ的移动端在t1位置,推杆ⅲ的移动端在e位置,推杆ⅱ的移动端在p2位置。
26、本发明,具有以下有益效果:
27、1、本发明的背架的旋转采用的是非铰接结构的旋转,依赖于y型的滑槽和滑动轮的配合,实现靠背和背架的旋转,且可以从初始角度旋转至水平,相当于背架的旋转中心不固定,且背架在旋转时候也发生侧移,因此该结构所需的旋转空间小,即推动背架下端的推杆ⅱ通过小角度的摆动伸缩,即可实现背架旋转至水平,小角度是指小于30°,而本技术的结构,由于滑槽中下方的为直线轨迹,且其上的滑动轮靠近或者平行背架的推杆ⅱ的移动端的铰接轴心,因此其可以进一步实现10°以内的摆动;如果下方直线轨迹的滑动轮和铰接轴心重合,则可以实现5°以内的摆动即可实现靠背和背架的旋转至水平功能;这是由于推杆ⅱ的移动端和下方直线轨迹的滑动轮,两者的轨迹是一致的,因此可以实现5°以内的小角度摆动伸缩,即可完成背架从初始位置旋转至水平;
28、2、本发明的座架铰接在背架上,且随背架整体运动,而且座架的调节旋转机构,即推杆ⅰ设置在背架上,因此无论背架如何运动,只需调整推杆ⅰ即可得到座架和背架的不同夹角;
29、3、本发明的腿架铰接座架,且腿架随座架整体运动,因此无论座架如何运动,同样的只需调整推杆ⅲ即可得到腿架和座架的不同夹角;为实现腿架和座架的大角度变化,即实现座架、腿架的上方工作面夹角为平角或小于平角,设置的支架并配合滑轨及滑轨的滑块,实现了一种四连杆机构和曲柄滑块机构的组合,实现了腿架、座架的大角度,尤其是实现了座架、腿架的上方工作面夹角为平角或小于夹角的姿态;
30、4、本发明的腿架、座架、背架均有旋转的自由度,且均可使两两相对旋转可变夹角,尤其是座架的可做一定角度旋转;实现了多个姿势如“v”、“l”、“z”、“一”、“7”座椅姿态,可以用于瑜伽姿势训练使用,而且本发明的推杆可以结合电动推杆应用,实现人体姿态的辅助训练,无需人体消耗过大的力气,减小了训练难度和所需的力量。
- 还没有人留言评论。精彩留言会获得点赞!