一种清洁机器人的旋转定位机构的制作方法
本发明涉及机器人,具体为一种清洁机器人的旋转定位机构。
背景技术:
1、斜面、玻璃幕墙及光伏机器人属于极限作业机器人的一种,主要应用于垂直或倾斜壁面和光伏面板,可通过搭载清洁作业工具,实现对壁面及光伏面板的清洁。
2、目前业界大部分机器人采用的运动方式主要有车轮履带式以及步履式;车轮履带式结构具有较快的移动速度,但在转向时无法精确控制转向角度及无法克服位置偏移问题;步履式结构通过结构配合可以很容易的实现在壁面上的移动与转向,但缺点是效率低下,商用价值较低。光伏清洁机器人采用的运动方式主要是履带式,此类结构在有一定角度的光伏面板上转向时角度及机器人机身偏移严重。由于转向产生的角度及机器人机身严重偏移会严重机器人的清洁覆盖率以及影响规划好的清洁路径,因此需要设计一种清洁机器人的旋转定位机构来解决上述出现的问题。
技术实现思路
1、鉴于现有技术中存在的上述问题,本发明的目的在于提供一种清洁机器人的旋转定位机构,以解决上述背景技术中提出目前业界大部分机器人采用的运动方式主要有车轮履带式以及步履式;车轮履带式结构具有较快的移动速度,但在转向时无法精确控制转向角度及无法克服位置偏移问题;步履式结构通过结构配合可以很容易的实现在壁面上的移动与转向,但缺点是效率低下,商用价值较低。光伏清洁机器人采用的运动方式主要是履带式,此类结构在有一定角度的光伏面板上转向时角度及机器人机身偏移严重。由于转向产生的角度及机器人机身严重偏移会严重机器人的清洁覆盖率以及影响规划好的清洁路径的问题。
2、本发明的技术方案是这样的:
3、一种清洁机器人的旋转定位机构,包括机器人主体,所述机器人主体的安装有舵机固定板,所述机器人主体的内部且位于舵机固定板的下方安装有红外传感器固定板,所述舵机固定板的外侧安装有旋转定位机构;
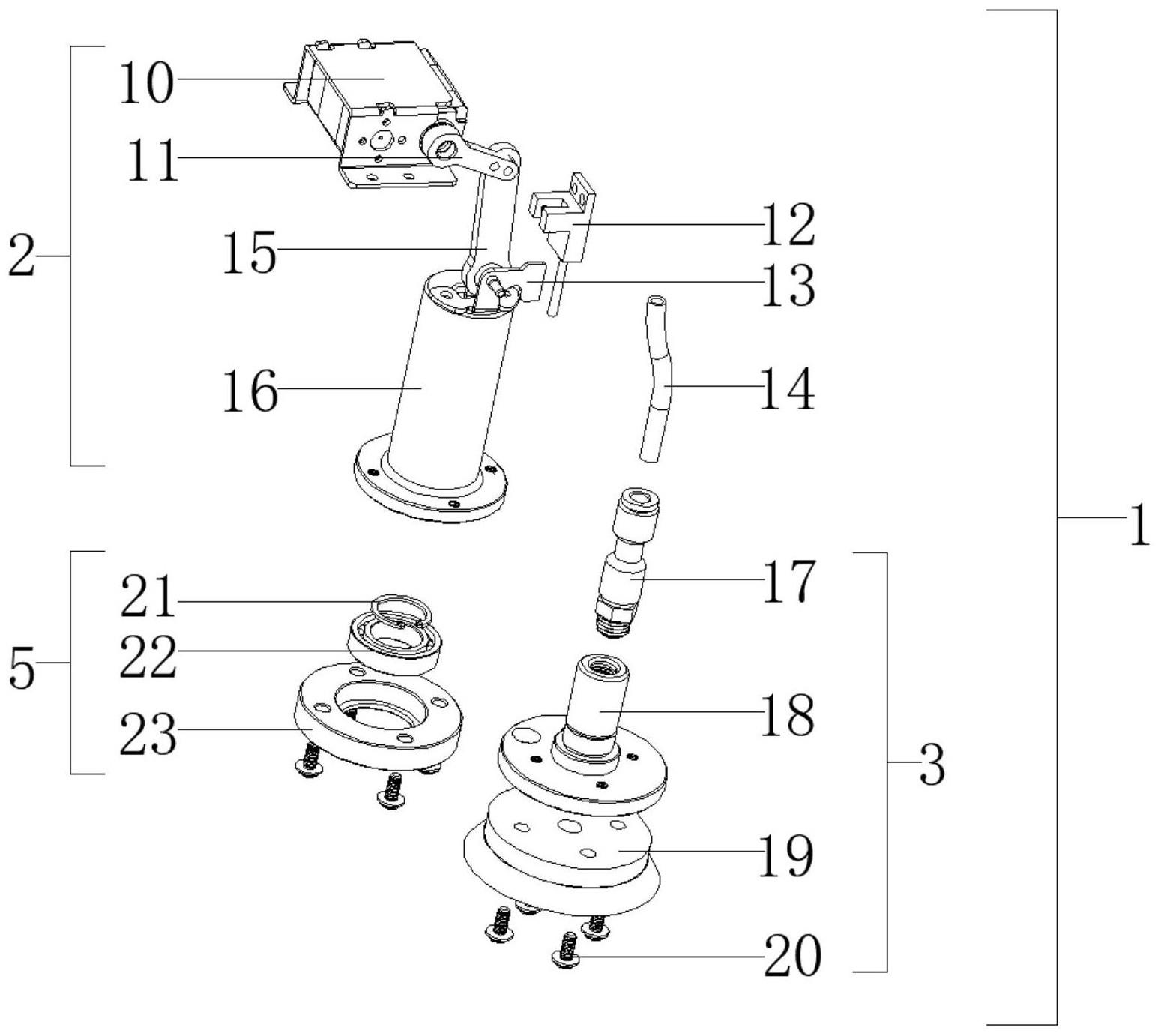
4、所述旋转定位机构包括舵机组件和升降组件,所述舵机固定板的外侧安装有舵机组件,所述舵机组件包括舵机主体和舵机摇臂,所述舵机固定板的外侧安装有舵机主体,所述舵机主体的输出端连接有舵机摇臂,所述舵机摇臂远离舵机主体的一端转动连接有摇臂连杆,所述摇臂连杆的一侧安装有升降滑动座,所述升降滑动座靠近摇臂连杆的一侧安装有连杆固定支架,所述摇臂连杆与连杆固定支架转动连接,所述升降滑动座的一端安装有吸盘上升下降组件,所述吸盘上升下降组件的外侧安装有安装组件,所述安装组件包括石墨铜套和固定座,所述吸盘上升下降组件的外侧安装有石墨铜套,所述石墨铜套远离吸盘上升下降组件的一端固定连接有固定座,所述固定座远离石墨铜套的一端安装有升降组件。
5、优选的,所述吸盘上升下降组件包括防尘轴承和底座固定套,所述升降滑动座的一端安装有防尘轴承,所述防尘轴承远离升降滑动座的一端安装有底座固定套,所述防尘轴承的一侧安装有配合升降滑动座使用的第一卡簧,所述底座固定套的外侧安装有四个吸气盘固定螺丝,所述吸气盘固定螺丝均与底座固定套螺纹连接,所述吸气盘固定螺丝均与升降滑动座螺纹连接。
6、优选的,所述升降组件包括吸气盘主体,所述固定座远离石墨铜套的一端连接有吸气盘转盘底座,所述吸气盘转盘底座的内部安装有气管快速接头,所述气管快速接头的内部安装有气管主体,所述吸气盘转盘底座远离固定座的一端安装有吸气盘主体。
7、优选的,所述连杆固定支架的外侧且远离摇臂连杆的一侧安装有红外传感器,所述红外传感器固定板为气动元件固定板。
8、优选的,所述机器人主体的内部固定连接有两个限位板,所述限位板的外侧均与舵机固定板相连接,所述限位板的外侧均与红外传感器固定板相连接,所述吸气盘主体的内部安装有四个吸气盘固定螺丝,所述吸气盘固定螺丝均与吸气盘主体螺纹连接,所述吸气盘固定螺丝均与吸气盘转盘底座螺纹连接。
9、优选的,所述石墨铜套的顶部安装有第二卡簧,所述固定座的外侧开设有四个通孔,所述气管主体的另一端延伸至升降滑动座内部。
10、优选的,所述机器人主体的外侧安装有外部控制终端,所述舵机组件、机器人主体和红外传感器均与外部控制终端电性连接。
11、本发明具有以下优点和有益效果:通过设置有旋转定位机构,在进行使用时,打开外部控制终端,将旋转定位机构的安装于机器人主体理想状态下的旋转中心位置,通过吸盘上升下降组件将整个旋转定位机构固定在机器人主体身上,机器人主体正常前进或则后退时,旋转定位机构处于待机状态,此时舵机摇臂向上转到40°位置,当机器人需要转动角度,改变行进方向时,行走组件先停止工作,机器人主体处于静止状态,舵机主体转动,带动舵机摇臂将安装组件推动向下运动,安装组件带动旋转吸附模块也向下运动,当吸气盘主体紧贴在壁面时舵机主体停止转动并锁止,然后外接真空泵将吸气盘主体内的空气抽出,大气压使吸气盘主体贴死在壁面上,此时机器人行走组件继续工作,两侧行走组件正反转使机器人主体转动角度,此时吸气盘主体、连接座、深沟球轴承内圈、轴用挡圈和气管快速接头与连接座连接的部分静止不动,旋转定位机构的其余部件与车体一起转动,到达预定的角度后,行走组件停止工作,机器人主体处于静止状态,真空泵停止抽气,吸气盘主体内外气压达到平衡状态,然后舵机主体反向转动,带动舵机摇臂及连杆固定支架将安装组件推动向上运动,安装组件带动旋转吸附模块也向上运动,吸气盘主体收回到待机状态,机器人主体继续工作,增强清洁机器人转向角度的定位准确性,实现清洁机器人主体定点的精准转向,降低对规划好的清洁路径的影响,增大机器人主体的清洁覆盖率,增加了对复杂环境的适应性,实现了完全的自主行驶,减少人力成本,维持了稳定清洁效果,清洁效率大大提升。
技术特征:
1.一种清洁机器人的旋转定位机构,包括机器人主体(6),其特征在于:所述机器人主体(6)的安装有舵机固定板(8),所述机器人主体(6)的内部且位于舵机固定板(8)的下方安装有红外传感器固定板(9),所述舵机固定板(8)的外侧安装有旋转定位机构(1);
2.根据权利要求1所述的清洁机器人的旋转定位机构,其特征在于:所述吸盘上升下降组件(5)包括防尘轴承(22)和底座固定套(23),所述升降滑动座(16)的一端安装有防尘轴承(22),所述防尘轴承(22)远离升降滑动座(16)的一端安装有底座固定套(23),所述防尘轴承(22)的一侧安装有配合升降滑动座(16)使用的第一卡簧(21),所述底座固定套(23)的外侧安装有四个吸气盘固定螺丝(20),所述吸气盘固定螺丝(20)均与底座固定套(23)螺纹连接,所述吸气盘固定螺丝(20)均与升降滑动座(16)螺纹连接。
3.根据权利要求2所述的清洁机器人的旋转定位机构,其特征在于:所述升降组件(3)包括吸气盘主体(19),所述固定座(26)远离石墨铜套(25)的一端连接有吸气盘转盘底座(18),所述吸气盘转盘底座(18)的内部安装有气管快速接头(17),所述气管快速接头(17)的内部安装有气管主体(14),所述吸气盘转盘底座(18)远离固定座(26)的一端安装有吸气盘主体(19)。
4.根据权利要求1所述的清洁机器人的旋转定位机构,其特征在于:所述连杆固定支架(13)的外侧且远离摇臂连杆(15)的一侧安装有红外传感器(12),所述红外传感器固定板(9)为气动元件固定板。
5.根据权利要求3所述的清洁机器人的旋转定位机构,其特征在于:所述机器人主体(6)的内部固定连接有两个限位板(7),每个所述限位板(7)的外侧均与舵机固定板(8)相连接,每个所述限位板(7)的外侧均与红外传感器固定板(9)相连接。
6.根据权利要求3所述的清洁机器人的旋转定位机构,其特征在于:所述吸气盘主体(19)的内部安装有四个吸气盘固定螺丝(20),所述吸气盘固定螺丝(20)均与吸气盘主体(19)螺纹连接,所述吸气盘固定螺丝(20)均与吸气盘转盘底座(18)螺纹连接。
7.根据权利要求3所述的清洁机器人的旋转定位机构,其特征在于:所述石墨铜套(25)的顶部安装有第二卡簧(24),所述固定座(26)的外侧开设有四个通孔,所述气管主体(14)的另一端延伸至升降滑动座(16)内部。
8.根据权利要求4所述的清洁机器人的旋转定位机构,其特征在于:所述机器人主体(6)的外侧安装有外部控制终端,所述舵机组件(2)、机器人主体(6)和红外传感器(12)均与外部控制终端电性连接。
技术总结
本发明公开了一种清洁机器人的旋转定位机构,涉及机器人技术领域,包括机器人主体,所述机器人主体的安装有舵机固定板,所述机器人主体的内部且位于舵机固定板的下方安装有红外传感器固定板,所述舵机固定板的外侧安装有旋转定位机构,本发明有益增效:通过设置有旋转定位机构,安装组件带动旋转吸附模块也向上运动,吸气盘主体收回到待机状态,机器人主体继续工作,增强清洁机器人转向角度的定位准确性,实现清洁机器人主体定点的精准转向,降低对规划好的清洁路径的影响,增大机器人主体的清洁覆盖率,增加了对复杂环境的适应性,实现了完全的自主行驶,减少人力成本,维持了稳定清洁效果,清洁效率大大提升。
技术研发人员:田殷钦,陈应洪
受保护的技术使用者:深圳怪虫机器人有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!