一种吊篮装置及其清洁机器人的制作方法
本发明涉及清洁机器人,尤其涉及的是一种吊篮装置及其清洁机器人。
背景技术:
1、目前,市面上的清洁机器人包括吸盘式的清洁机器人、履带式的清洁机器人、甚至仿生式的清洁机器人,虽然清洁机器人的种类繁多,但是仍然有部分清洁机器人的运行方式是先安装至吊篮,再利用吊装设备悬吊吊篮作业。
2、例如公开号为cn115504413a的吊篮机构及外墙施工机器人,该吊篮机构通过将机器人安装至吊篮上,再进行高空作业,使用该吊篮机构可使悬挂在高空中的机器人扩大清洁范围,提高清洁效率。通常吊篮机构采用起重机的挂钩配合钢丝绳实现吊装,但是高楼的风力较强,吊篮机构在工作过程中可能发生脱钩或断钩风险,一但发生脱钩或断钩事件,吊篮机构和机器人将会双双坠落损坏。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种吊篮装置及其清洁机器人,旨在解决现有技术中吊篮装置工作过程中可能发生脱钩和断钩坠落风险的问题。
2、本发明解决技术问题所采用的技术方案如下:
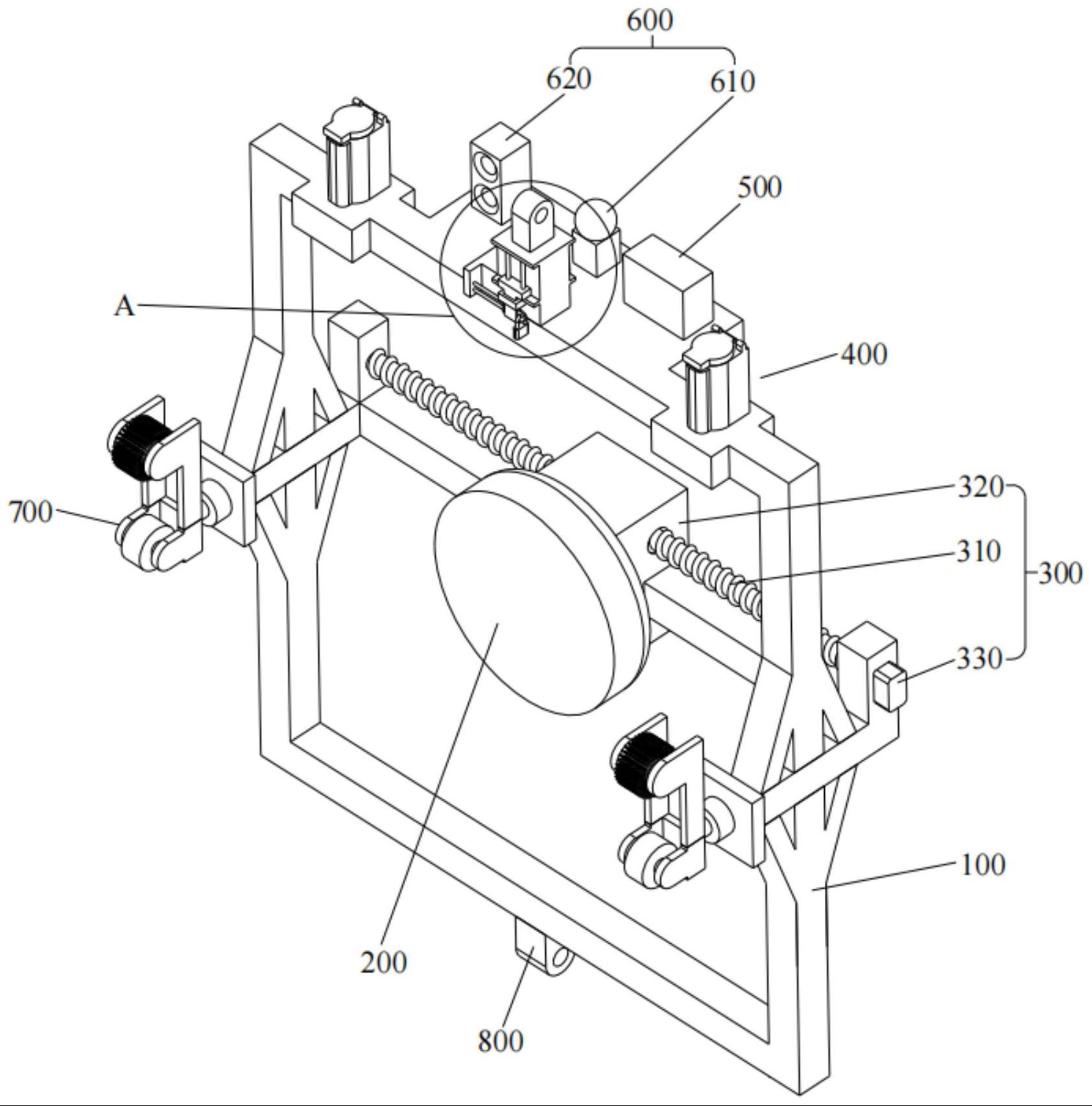
3、一种吊篮装置,用于通过钢丝绳连接挂钩,包括:
4、框架;
5、连接组件,设置于所述框架,用于固定待作业的清洁机器人;
6、悬挂组件,设置于所述框架的第一端;
7、降落伞结构,设置于所述框架的第一端;
8、控制主机,设置于所述框架上;
9、其中,所述悬挂组件包括壳体和第一悬挂件,所述壳体设置于所述框架,所述第一悬挂件与所述壳体滑动连接,所述第一悬挂件的第一端穿出所述壳体外并与所述挂钩连接,所述第一悬挂件的第二端为光滑平面且位于所述壳体内,所述光滑平面上设置第一导电片,所述壳体内设置对应的第二导电片;
10、所述第一导电片和所述第二导电片用于接触导通所述控制主机控制所述降落伞结构打开。
11、可选的,所述第一悬挂件的第二端设置配重块。
12、可选的,所述框架的第二端设置第二悬挂件。
13、可选的,所述吊篮装置还包括提醒模块,所述提醒模块与所述控制主机电连接,所述提醒模块包括语音模块和灯光模块任一种或多种组合。
14、可选的,所述吊篮装置还包括定位模块,所述定位模块设置在所述框架。
15、可选的,所述壳体设置贯穿的第一凹槽,所述第一凹槽中插设有隔离结构,所述隔离结构包括:
16、第一隔离板,设置于所述第一凹槽,且两端均延伸至所述壳体的外侧,延伸至所述壳体外的所述第一隔离板第一端设置第二凹槽;
17、第二滑杆,设置于所述壳体,且位于所述第二凹槽的上方;
18、第二隔离板,滑设于所述第二滑杆;
19、其中,所述第二隔离板可插设至所述第二凹槽。
20、可选的,所述第二隔离板上设置卡槽,所述卡槽上设置锁紧结构,所述锁紧结构包括:
21、固定板,固定在所述壳体的第一端;
22、伸缩杆,固定在所述固定板;
23、锁耳,固定在所述伸缩杆;
24、锁具;
25、其中,所述锁耳穿过所述卡槽并被所述锁具锁紧。
26、可选的,所述框架的底部设置可拆卸的支撑架体。
27、可选的,所述连接组件包括:
28、丝杆,转动设于所述框架;
29、滑块,转动设于所述丝杆;
30、电机,设置于所述框架,且与所述丝杆驱动连接;
31、其中,所述滑块用于固定待作业的清洁机器人。
32、一种清洁机器人,包括:
33、如上述任一项技术方案所述的吊篮装置;
34、机器人本体;
35、所述机器人本体固定在所述吊篮装置上。
36、有益效果:
37、本发明通过在框架上设置悬挂组件,第一悬挂件通过钢丝绳与挂钩连接,第一悬挂件的第一端受到挂钩的拉力向壳体的外侧上升伸出,当挂钩脱钩时,第一悬挂件因自身重力将沿着壳体下降,第一悬挂件的第二端上的第一导电片和壳体内的第二导电片接触导通控制主机,控制主机控制降落伞结构打开,以使框架能够在降落伞的作用下缓慢降落,避免框架直接坠落损坏,提高使用安全性和使用寿命。
技术特征:
1.一种吊篮装置,用于通过钢丝绳连接挂钩,其特征在于,包括:
2.根据权利要求1所述的吊篮装置,其特征在于,所述第一悬挂件的第二端设置配重块。
3.根据权利要求2所述的吊篮装置,其特征在于,所述框架的第二端设置第二悬挂件。
4.根据权利要求3所述的吊篮装置,其特征在于,所述吊篮装置还包括提醒模块,所述提醒模块与所述控制主机电连接,所述提醒模块包括语音模块和灯光模块任意一种或多种组合。
5.根据权利要求4所述的吊篮装置,其特征在于,所述吊篮装置还包括定位模块,所述定位模块设置在所述框架。
6.根据权利要求1所述的吊篮装置,其特征在于,所述壳体设置贯穿的第一凹槽,所述第一凹槽中插设有隔离结构,所述隔离结构包括:
7.根据权利要求6所述的吊篮装置,其特征在于,所述第二隔离板上设置卡槽,所述卡槽上设置锁紧结构,所述锁紧结构包括:
8.根据权利要求1所述的吊篮装置,其特征在于,所述框架设置可拆卸的支撑架体。
9.根据权利要求1所述的吊篮装置,其特征在于,所述连接组件包括:
10.一种清洁机器人,其特征在于,包括:
技术总结
本发明公开了一种吊篮装置及其清洁机器人,吊篮装置用于通过钢丝绳连接挂钩,该装置包括框架、连接组件、悬挂组件、降落伞结构和控制主机,连接组件设置于框架,悬挂组件设置于框架,降落伞结构设置于框架,控制主机设置于框架,悬挂组件包括壳体和第一悬挂件,第一悬挂件与壳体滑动连接,第一悬挂件的第一端穿出壳体外并与挂钩连接,第一悬挂件的第二端为光滑平面且位于壳体内,光滑平面上设置第一导电片,壳体内设置第二导电片,第一导电片和第二导电片接触导通控制主机,控制主机控制降落伞结构打开。本发明能够在挂钩脱钩或断裂时打开降落伞结构,框架能够在降落伞作用下降落,避免框架坠落损坏,提高使用安全性和使用寿命。
技术研发人员:吴方正
受保护的技术使用者:深圳市安杰信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!