智能清洁设备的制作方法
本发明涉及家用电器设备领域,尤其涉及一种智能清洁设备。
背景技术:
1、智能清洁设备(或称自动清洁设备)是一种根据设定程序能够自动完成清洁的设备。例如,扫地机器人。
2、图1中示出了一种自动清洁设备在上方障碍物的作用下发生机身倾斜的示意图。下面结合图1,对自动清洁设备发生机身倾斜与被上方障碍物卡死之间的关系和原理进行描述。
3、现有的自动清洁设备的位置确定装置20可以测量出周围物体的距离、尺寸等参数。但如果存在上方障碍物100,且上方障碍物100的底部空隙高度与自动清洁设备的高度十分接近,那么由于位置确定装置20的保护罩的顶部位于感测单元上方,因此这一部分为测量盲区,再加上存在测量误差等原因,导致位置确定装置20无法识别出上方障碍物100对自动清洁设备的阻碍,或者对上方障碍物100形成的前进阻碍可能形成误判断等。
4、比如自动清洁设备的最高处大约为10cm时,用户家中的柜子、床、沙发等的离地间距往往也是10cm左右,那么这些东西可能会成为自动清洁设备的上方障碍物。
5、随着自动清洁设备的前进,若位置确定装置20对应的凸起结构确实低于上方障碍物100的底侧高度,则自动清洁设备可以正常进入上方障碍物100的底部,并执行相应的自动清洁操作。而若位置确定装置20对应的凸起结构确实高于上方障碍物100的底侧高度,则该凸起结构将与上方障碍物100之间形成接触点。
6、那么,自动清洁设备的驱动轮与地面之间形成另一接触点。那么当自动清洁设备在行进过程中被上方障碍物100卡在其与上方障碍物100的接触点时,自动清洁设备受自身的向下的重力和驱动轮在地面上摩擦受到的向前的摩擦力的作用,自动清洁设备将沿顺时针旋转,即自动清洁设备的头部向上倾斜,形成图1所示的倾斜后状态。
7、这种情况下自动清洁设备处于卡死状态,不能再移动,导致设置卡死在缝隙内。
技术实现思路
1、本发明的实施例提供一种智能清洁设备,以解决现有的清洁机器人进入高度不够的空间容易卡住的问题。
2、具体第,本发明的提供一种智能清洁设备,包括:
3、机器主体;
4、位置确定装置,包括保护罩,所述保护罩可转动地设置在所述机器主体上;
5、防卡装置,所述防卡装置能够检测所述保护罩的转动位置信息,并根据检测的转动位置信息控制所述智能清洁设备执行防卡动作。
6、在一些实施例中,所述防卡装置包括:检测器,用于检测所述保护罩的转动位置。
7、在一些实施例中,所述智能清洁设备包括行走部,所述行走部与所述机器主体连接,并可带动所述机器主体移动,所述防卡装置还包括:
8、控制部,所述控制部分别与所述检测器和所述行走部连接,所述防卡动作包括:所述控制部根据所述检测器检测的所述保护罩的位置控制所述行走部带动所述机器主体执行避让动作。
9、在一些实施例中,所述位置确定装置包括:
10、支架,所述支架可转动地设置在所述机器主体上,所述支架上承载保护罩,所述保护罩内设置有位置确定组件。
11、在一些实施例中,智能清洁设备还包括缓冲组件,所述缓冲组件用于对所述保护罩的转动进行缓冲。
12、在一些实施例中,所述缓冲组件包括主缓冲件和/或辅助缓冲件,用于对所述保护罩的转动进行缓冲。
13、在一些实施例中,所述主缓冲件设置在所述保护罩上,并可随所述保护罩的转动而移动。
14、在一些实施例中,所述主缓冲件随所述保护罩转动过程中与所述辅助缓冲件接触。
15、在一些实施例中,所述辅助缓冲件上设置有检测器,所述保护罩上设置有触发器,当所述保护罩转动时,使得所述保护罩上的触发器触动所述检测器。
16、在一些实施例中,所述主缓冲件包括:
17、基体;
18、缓冲支腿,固定连接在所述基体上。
19、在一些实施例中,所述辅助缓冲件设置在主壳体上。
20、在一些实施例中,所述辅助缓冲件包括:
21、安装座,所述安装座与所述主壳体连接;
22、缓冲板,所述缓冲板的第一端与所述安装座连接,所述缓冲板的第二端设置有检测器。
23、在一些实施例中,所述缓冲板的第一端设置有折弯缓冲段,所述缓冲板通过所述折弯缓冲段与所述安装座连接。
24、为达到上述目的,本发明的实施例提供本发明的实施例的智能清洁设备通过将位置确定装置可转动地连接在主壳体上,防卡装置能够检测位置确定装置的转动位置信息,并根据位置确定装置的转动位置信息控制智能清洁设备执行防卡动作,这样位置确定装置能够在触碰障碍物时转动,从而使防卡装置控制智能清洁设备执行防卡操作,防止智能清洁设备卡死在高度不足的空间内,使智能清洁设备的适应性更好。
技术特征:
1.一种智能清洁设备,其特征在于,包括:
2.根据权利要求1所述的智能清洁设备,其特征在于,所述防卡装置包括:检测器,用于检测所述保护罩的转动位置。
3.根据权利要求2所述的智能清洁设备,其特征在于,所述智能清洁设备包括行走部,所述行走部与所述机器主体连接,并可带动所述机器主体移动,所述防卡装置还包括:
4.根据权利要求1或2所述的智能清洁设备,其特征在于,所述位置确定装置包括:
5.根据权利要求1或2所述的智能清洁设备,其特征在于,智能清洁设备还包括缓冲组件,所述缓冲组件用于对所述保护罩的转动进行缓冲。
6.根据权利要求5所述的智能清洁设备,其特征在于,所述缓冲组件包括主缓冲件和/或辅助缓冲件,用于对所述保护罩的转动进行缓冲。
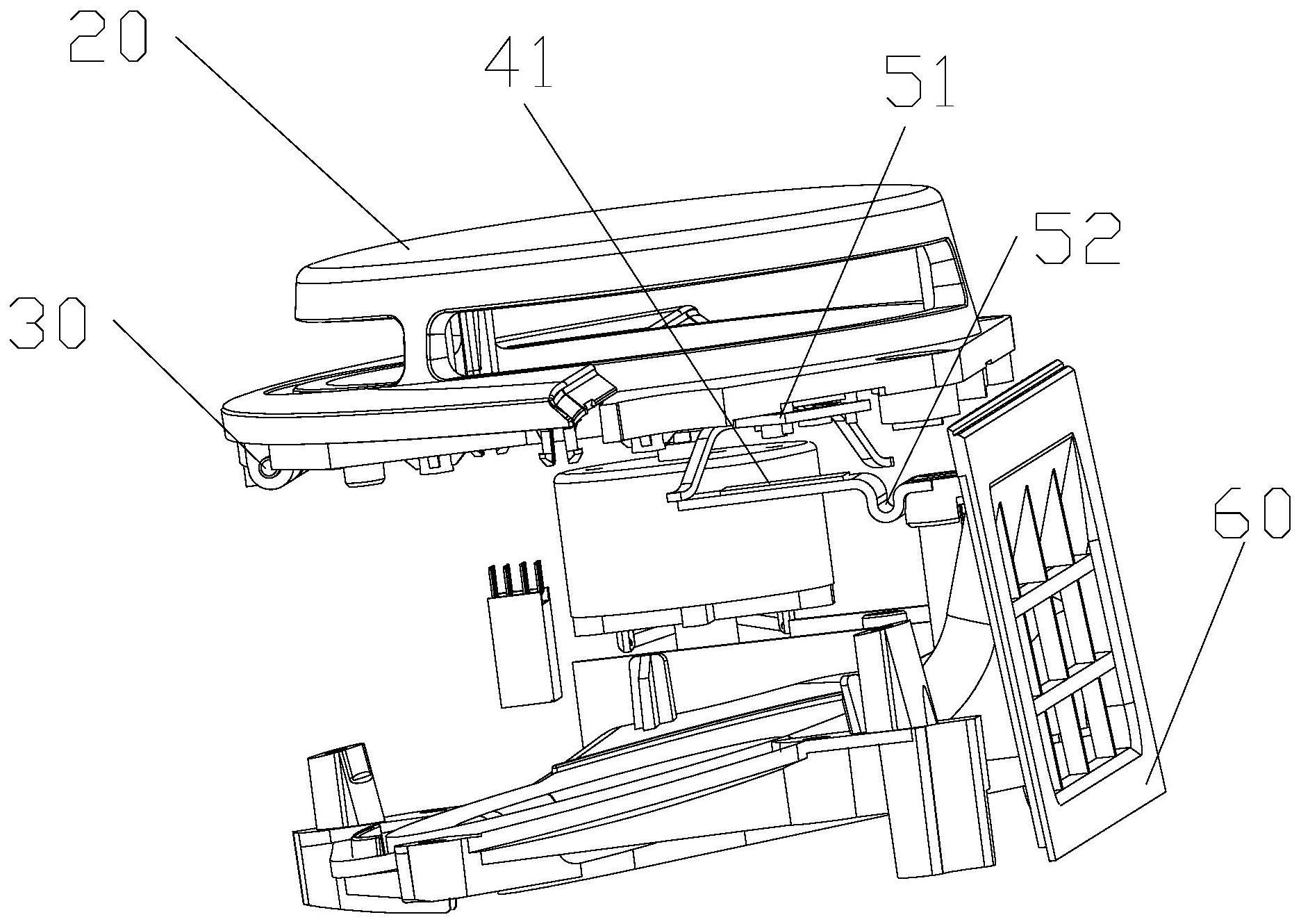
7.根据权利要求6所述的智能清洁设备,其特征在于,所述主缓冲件(51)设置在所述保护罩上,并可随所述保护罩的转动而移动。
8.根据权利要求7所述的智能清洁设备,其特征在于,所述主缓冲件(51)随所述保护罩转动过程中与所述辅助缓冲件(52)接触。
9.根据权利要求6所述的智能清洁设备,其特征在于,所述辅助缓冲件上设置有检测器,所述保护罩上设置有触发器,当所述保护罩转动时,使得所述保护罩上的触发器触动所述检测器。
10.根据权利要求6所述的智能清洁设备,其特征在于,所述主缓冲件包括:
11.根据权利要求6所述的智能清洁设备,其特征在于,所述辅助缓冲件设置在主壳体上。
12.根据权利要求11所述的智能清洁设备,其特征在于,所述辅助缓冲件包括:
13.根据权利要求12所述的智能清洁设备,其特征在于,所述缓冲板的第一端设置有折弯缓冲段,所述缓冲板通过所述折弯缓冲段与所述安装座连接。
技术总结
本发明提供一种智能清洁设备。该智能清洁设备包括:机器主体;位置确定装置,包括保护罩,所述保护罩可转动地设置在所述机器主体上;防卡装置,所述防卡装置能够检测所述保护罩的转动位置信息,并根据检测的转动位置信息控制所述智能清洁设备执行防卡动作。该智能清洁设备能够避免卡死,适应性更好。
技术研发人员:李行,王子涛,米长,李智军,乔亮
受保护的技术使用者:北京石头世纪科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!