一种定位方法、装置、计算机设备及扫地机器人与流程
本技术涉及智能家居,特别涉及一种定位方法、装置、计算机设备及扫地机器人。
背景技术:
1、扫地机器人产品已经广泛应用于千家万户,可以自动建立并更新室内的地图,根据地图和路径算法自动进行吸尘、清扫、拖地等地面清洁工作。为了改善清洁效果,部分扫地机器人可以通过高频振动或选择的方式进行强力拖地。
2、然而现有的扫地机器人定位通常依靠待清洁区域的墙壁、家具等障碍物,在距离障碍物较远时容易出现定位误差,容易出现清洁死角、部分位置重复清洁等情况,甚至影响扫地机器人的正常移动,影响清洁效率。
3、在扫地机器人进行清扫区域地图绘制、坐标设定和自身定位时,通常需要基于定位传感器系统确定坐标定位结果。然而定位传感器系统会有误差,可能同一位置在不同时间检测得到的坐标值不同。一般来说扫地机器人通过做标记找到当前所在的网络单元,但若坐标值不稳定会导致网格单元的确定不准确。由于传感器系统存在误差,当前位置与网络单元格及历史信息的映射关系也存在误差,扫地机器人运行过程中的定位存在不准确的问题。
技术实现思路
1、为解决现有的扫地机器人定位不准确的问题,本技术提供一种定位方法、装置、计算机设备及扫地机器人,能够准确定位扫地机器人位置,提高清扫效率。
2、一方面,提供了一种定位方法,所述方法包括:
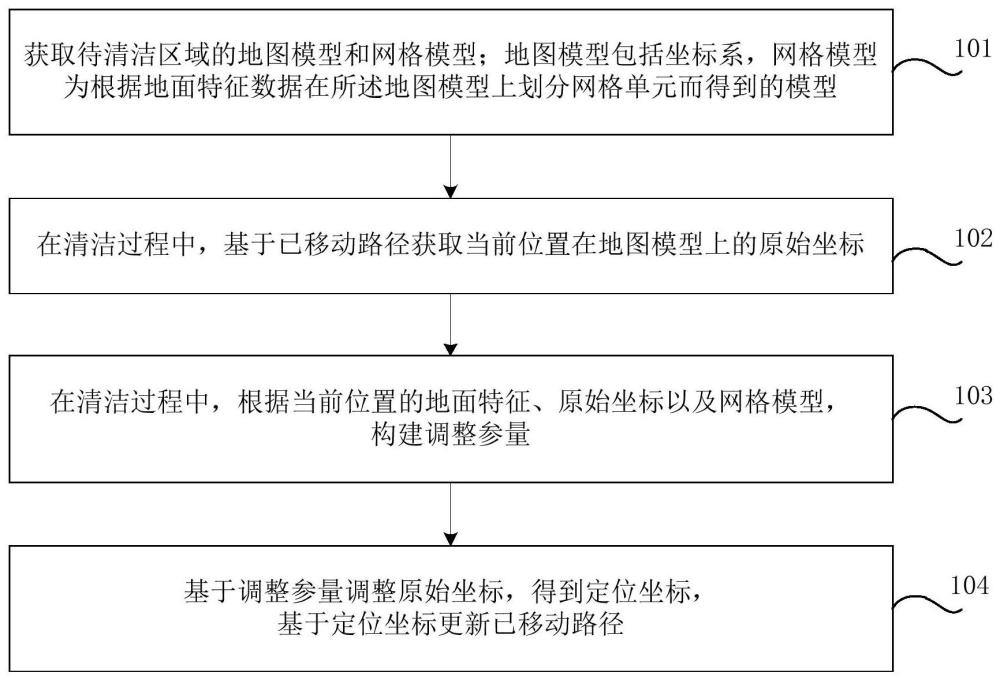
3、获取待清洁区域的地图模型和网格模型;所述地图模型包括坐标系,所述网格模型为根据地面特征数据在所述地图模型上划分网格单元而得到的模型;
4、在清洁过程中,基于已移动路径获取当前位置在所述地图模型上的原始坐标;
5、在清洁过程中,根据当前位置的地面特征、所述原始坐标以及所述网格模型,构建调整参量;
6、基于所述调整参量调整所述原始坐标,得到定位坐标,基于所述定位坐标更新已移动路径。
7、在一些实施例中,所述方法还包括:
8、获取待清洁区域的边界和障碍物,并为所述待清洁区域建立坐标系,得到所述待清洁区域的地图模型;
9、获取待清洁区域的地面特征数据;所述地面特征数据包括所述待清洁区域上各个子区域的位置和地面特征,所述地面特征包括地面的材质类型、颜色、粗糙度或反光率中的一种或多种;
10、基于所述地面特征数据对所述地图模型进行网格单元划分,记录各网格单元在所述地图模型坐标系中的位置与形状、地面特征,记录各对网格单元之间交界线在所述地图模型坐标系中的位置和地面特征,得到所述网格模型。
11、在一些实施例中,所述方法还包括:
12、所述网格模型满足任意一个网格单元内不同位置的地面特征相同或相近,任意一条所述交界线的不同位置的地面特征相同或相近;
13、所述网格模型满足一个网格单元至多包含一个地面材质单元的全部或一部分。
14、在一些实施例中,所述基于以移动路径获取当前位置在所述地图模型上的原始坐标,包括:
15、基于用于定位的传感器系统获取到当前位置在所述地图模型上的第一原始坐标;根据已移动路径中最近记录的定位坐标、记录该定位坐标后的移动方向、移动时间和移动速度等,计算出第二原始坐标;综合第一原始坐标和第二原始坐标,得到所述原始坐标。
16、在一些实施例中,所述根据当前位置的地面特征、所述原始坐标以及所述网格模型,构建调整参量,包括:
17、获取所述原始坐标在所述网格模型中的第一地面特征,基于所述第一地面特征判断所述原始坐标是否在网格交界线上;
18、基于所述当前位置的地面特征判断当前位置是否在网格交界线上;
19、若所述当前位置在网格交界线上,所述原始坐标不在网格交界线上,则在所述网格模型中选取满足第一预设条件的目标交界线;所述第一预设条件包括在地面特征与当前位置网格交界线相接近、且在位置上与原始坐标最近的目标交界线;根据所述原始坐标和所述目标交界线的坐标差值计算调整参量。如果找不到所述目标交界线,则把所述网格模型的状态记录为待更新。
20、在一些实施例中,所述方法还包括:
21、若所述当前位置不在网格交界线上,则将所述调整参量设置为0,将所述原始坐标作为定位坐标,将所述定位坐标标记为待更新;
22、若所述当前位置在网格交界线上,所述原始坐标在网格交界线上,且所述第一地面特征与所述当前位置的地面特征相同,则将所述调整参量设置为0,将所述原始坐标作为定位坐标,将所述定位坐标标记为无需更新;
23、若所述当前位置在网格交界线上,所述原始坐标在网格交界线上,且所述第一地面特征与所述当前位置的地面特征不相同,则将所述调整参量设置为0,将所述原始坐标作为定位坐标,将所述定位坐标标记为待更新。
24、在一些实施例中,所述基于所述调整参量调整所述原始坐标,得到定位坐标,基于所述定位坐标更新已移动路径,包括:
25、若所述调整参量不为0,则基于所述调整参量调整当前的所述原始坐标和当前标记为待更新的定位坐标;
26、基于更新后的定位坐标更新已移动路径。
27、在一些实施例中,所述方法还包括:
28、若当前位置不在网格交界线上,原始坐标不在网格交界线上,且第一地面特征与当前位置的地面特征不相符,则将网格模型的状态记录为待更新;
29、当检测到网格模型的状态记录为待更新时,重新获取地面特征数据;
30、基于重新获取的地面特征数据对所述地图模型进行网格单元划分,以更新所述网格模型。
31、在一些实施例中,所述方法还包括:
32、基于所述定位坐标对应的网格单元,确定当前网格单元的材质;
33、基于所述当前网格单元的材质确定预存的清洁方式,以所述预存的清洁方式对所述当前网格单元进行清洁。
34、另一方面,提供了一种定位装置,包括:
35、模型获取模块,用于获取待清洁区域的地图模型和网格模型;所述地图模型包括坐标系,所述网格模型为根据地面特征数据在所述地图模型上划分网格单元而得到的模型;
36、原始坐标获取模块,用于在清洁过程中,基于已移动路径获取当前位置在所述地图模型上的原始坐标;
37、调整参量计算模块,用于在清洁过程中,根据当前位置的地面特征、所述原始坐标以及所述网格模型,构建调整参量;
38、坐标更新模块,用于基于所述调整参量调整所述原始坐标,得到定位坐标,基于所述定位坐标更新已移动路径。
39、另一方面,提供了一种计算机设备,计算机设备包括处理器和存储器,存储器中存储有至少一条指令、至少一段程序、代码集或指令集,处理器可加载并执行至少一条指令、至少一段程序、代码集或指令集,以实现上述申请实施例中提供的定位方法。
40、另一方面,提供了一种扫地机器人,包括如上所述的计算机设备。
41、另一方面,提供了一种计算机可读存储介质,可读存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,处理器可加载并执行至少一条指令、至少一段程序、代码集或指令集,以实现上述本技术实施例中提供的定位方法。
42、另一方面,提供了一种计算机程序产品或计算机程序,该计算机程序产权或计算机程序包括计算机程序指令,该计算机程序指令存储于计算机可读存储介质中。处理器从计算机可读存储介质读取该计算机指令,并执行还计算机指令,使得该计算机设备执行上述实施例中任一所述的定位方法。
43、本技术提供的技术方案带来的有益效果至少包括:本发明实施例提供了一种定位方法、装置、计算机设备及扫地机器人,所述方法包括获取待清洁区域的地图模型和网格模型;所述地图模型包括坐标系,所述网格模型为根据地面特征数据在所述地图模型上划分网格单元而得到的模型;在清洁过程中,基于已移动路径获取当前位置在所述地图模型上的原始坐标;在清洁过程中,根据当前位置的地面特征、所述原始坐标以及所述网格模型,构建调整参量;基于所述调整参量调整所述原始坐标,得到定位坐标,基于所述定位坐标更新已移动路径。本发明实施例提供的方法能够基于网格模型和调整参量对扫地机器人的原始坐标进行调整,提高扫地机器人的定位准确性,从而提高清洁效率,优化用户使用体验。
- 还没有人留言评论。精彩留言会获得点赞!