一种多方位自动调节的智能桌板、智能学习桌及其使用方法与流程
本发明涉及桌椅,尤其涉及一种多方位自动调节的智能桌板、智能学习桌及其使用方法。
背景技术:
1、学校以及家庭使用的学习桌、座椅多由桌板和桌腿固定组成,无法进行调节以帮助学生矫正坐姿,学生在学习时,课本平铺在桌面上,学生需要低着头去学习,时间长后会造成学生坐姿不正,眼睛与课本的距离会不由自主的越来越近,极易造成疲劳以及近视。
2、其中对比文件cn202110437242.7公开了一种方便矫正坐姿预防近视的课桌,其主要解决了“学生经常呈现弯腰、驼背,甚至趴在课桌上的状态,由于学生的自控能力较弱,往往不能及时纠正自己的坐姿,这样会导致脊椎长时间承受压力,导致弯腰驼背、近视眼甚至腰椎疾病产生,严重影响青少年骨骼发育及视力”的问题,在此方案实施时,会出现如下问题,1、学生坐在座椅上时靠背抵住的是学生背部,让学生坐直,但肩部并没有有效的矫正措施,学生会出现弓肩、低头的情况,眼睛也会靠近书本,极易造成近视;2、课桌没有监测功能、自动调节功能,光靠学生的自控能力以及该方案中的矫正组件,并不能有效纠正学生的坐姿;为了优化方案从业者设计了一种多方位自动调节的智能桌板、智能学习桌及其使用方法。
技术实现思路
1、本发明的目的就在于为了解决现有的学习桌无法根据学生的坐姿多方位自动调节、以及矫正学生坐姿的问题而提供了一种多方位自动调节的智能桌板、智能学习桌及其使用方法。
2、本发明通过以下技术方案来实现上述目的:
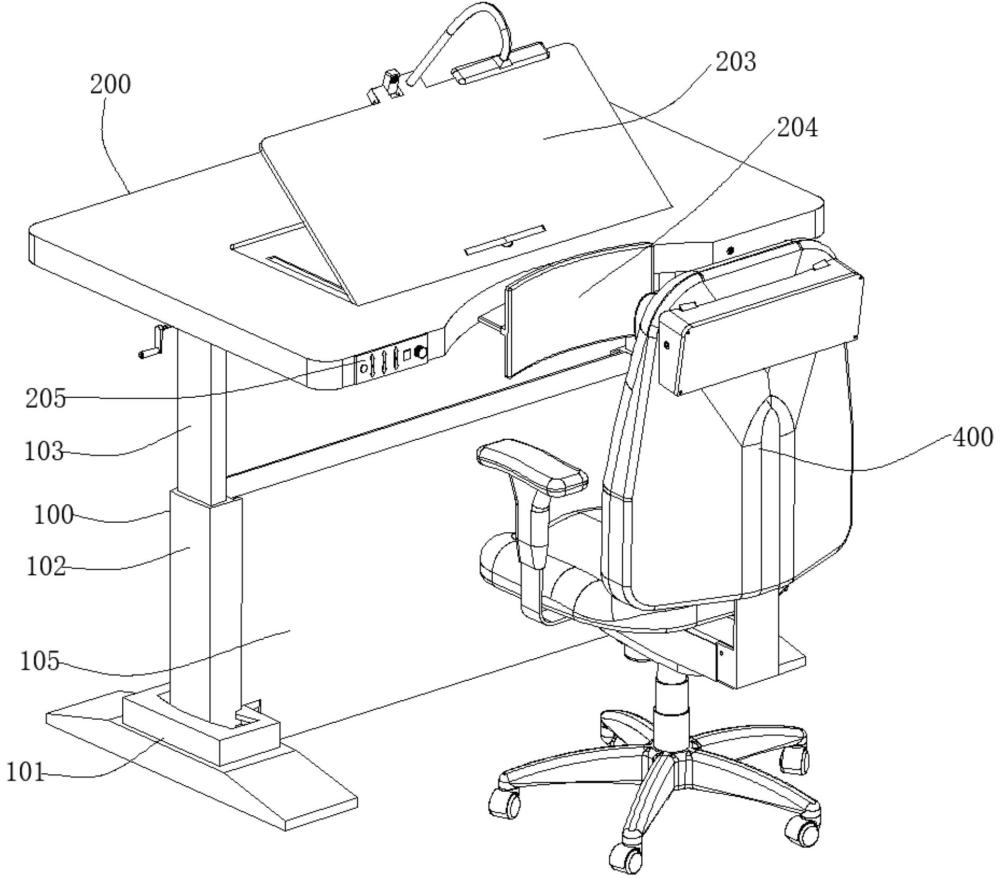
3、一种多方位自动调节的智能桌板、智能学习桌,包括支撑架,所述支撑架顶端设置有桌板,所述桌板底部下表面安装有驱动组件,所述支撑架前侧外放置有座椅;
4、所述支撑架包括两组支撑脚,每组所述支撑脚上安装有固定支腿,所述固定支腿内腔安装有移动支腿,两组所述移动支腿上端位置设置有升降组件,所述驱动组件驱动所述升降组件运行,两组所述固定支腿之间设置有挡板,所述挡板内腔设置有与所述支撑脚相配合的角度调节组件;
5、所述桌板包括安装在所述移动支腿上表面的平移组件,所述驱动组件驱动所述平移组件运行,所述桌板内腔设置有翻转组件,所述翻转组件连接有翻转板,所述翻转板内嵌转动连接在所述桌板上表面,所述桌板前侧边设置有防近视组件,所述桌板前侧边位于所述防近视组件一侧设置有控制面板,所述桌板底部设置有电源插头,所述桌板底部位于所述电源插头一侧内嵌设置有plc控制板和蓄电瓶。
6、进一步的,所述支撑脚内腔底部设置有弧形齿条,所述支撑脚内腔两侧开设有导向槽,所述支撑脚内侧开设有角度限位孔;
7、所述固定支腿内腔设置有导向柱,所述固定支腿下端两侧设置有导向块,所述固定支腿内侧两端设置有插接槽,所述固定支腿内腔开设有避位槽;
8、所述移动支腿顶部设置有承托块,所述移动支腿下端四边设置有限位块,所述限位块与所述避位槽相适配;
9、所述挡板包括主挡板,所述主挡板一侧通过螺栓连接有副挡板,所述主挡板与所述副挡板两端均设置有插接块,所述插接块与所述插接槽适配,所述主挡板内部下方位置分别设置有承载板和辅助板。
10、进一步的,所述升降组件包括传动杆,所述传动杆上设置有第一齿轮,所述传动杆两端分别转动连接于两组所述移动支腿内,所述传动杆两端均设计成第一蜗杆,所述第一蜗杆啮合传动有第一蜗轮,所述第一蜗轮套设在第一丝杆上,所述第一丝杆首端与通过轴承座连接在所述移动支腿内腔上端,所述第一丝杆下端与所述固定支腿上端面通过滚珠螺母相连接。
11、进一步的,所述角度调节组件包括第一转轴和第二转轴,所述第一转轴和所述第二转轴分别转动连接于所述辅助板与两组所述固定支腿之间,所述第一转轴靠近所述辅助板一端设置有第一锥型齿,所述第二转轴靠近所述辅助板一端设置有第二锥型齿,所述承载板上安装有第一电机,所述第一电机输出端设置有主锥型齿,所述主锥型齿与所述第一锥型齿、所述第二锥型齿均啮合传动,所述第一转轴和所述第二转轴远离所述辅助板的一端均设置有第七齿轮,所述第七齿轮与所述弧形齿条相啮合传动。
12、进一步的,所述平移组件包括安装在所述移动支腿上表面的两组定位块,其中一所述定位块外侧设置有微型电机,所述微型电机输出端贯通所述定位块连接有第二丝杆,所述第二丝杆末端通过轴承座与所述定位块相转动连接,所述桌板通过滚珠螺母与所述第二丝杆相配合传动。
13、进一步的,所述翻转组件包括转动连接于所述桌板内部的第三转轴,所述第三转轴一端设计成第三丝杆,所述第三丝杆上通过滚珠螺母连接有铰接座,所述铰接座铰接有支撑杆,所述支撑杆与所述翻转板相铰接,所述桌板位于所述翻转板下方两端均铰接有液压杆,所述液压杆首端与所述翻转板相铰接,所述第三转轴另一端设置有第二蜗轮,所述桌板底部表面通过轴承座转动连接有第二蜗杆,所述第二蜗杆与所述第二蜗轮相啮合传动,所述第二蜗杆上设置有第二齿轮,所述第二蜗杆两端分别设置有第三齿轮;
14、所述翻转板靠近前侧表面转动设置有挡杆,所述翻转板后侧边设置有照明灯,所述翻转板后侧边靠近所述照明灯一侧设置有监测摄像头,所述监测摄像头由伺服电机控制转动。
15、进一步的,所述防近视组件包括滑动板,所述滑动板内侧两端延伸出滑动杆,所述滑动杆上套设有弹簧,所述弹簧居于用以限位的所述桌板的卡槽内,所述滑动杆端部设计成齿条,并与所述第三齿轮相啮合传动,所述滑动板外侧安装有抵触板。
16、进一步的,所述驱动组件包括电动缸,所述电动缸通过折弯板固定在所述桌板下表面,所述电动缸输出端一侧设置有第二电机,所述第二电机输出端与所述电动缸输出端通过衔接部件相连接,所述第二电机输出端设置有第四齿轮,所述第二电机外圈套设有固定盒,所述固定盒与所述桌板之间设置有滑动模组;
17、所述滑动模组包括导轨,所述导轨内嵌安装在所述桌板底部,所述导轨上滑动连接有滑块,所述滑块安装在所述固定盒表面。
18、进一步的,所述座椅包括椅脚,所述椅脚上端设置有坐垫,所述坐垫后侧连接有靠背,所述靠背两端设置有扶手,所述靠背上方位置设置有矫正组件;
19、所述矫正组件包括安装壳,所述安装壳内部安装有第三电机,所述安装壳位于所述第三电机上方转动连接有第四转轴,所述第四转轴中间位置设置有第五齿轮,所述第三电机输出端设置有所述第六齿轮,所述第五齿轮与所述第六齿轮相啮合传动,所述第四转轴两端均缠绕有肩带,所述肩带贯穿所述安装壳固定连接在所述靠背上。
20、一种多方位自动调节的智能桌板、智能学习桌及其使用方法,包括以下步骤:
21、s1:把所述电源插头接通电源,按下所述控制面板的开关按钮,通过所述plc控制板控制所述微型电机运行,带动所述第二丝杆转动从而带动所述桌板向后移动,让所述桌板与所述座椅之间的距离拉开以便让学生坐入所述座椅上,随后关闭开关让所述桌板归位;
22、s2:学生想要书写时,调整坐姿并把所述肩带穿戴好,调节所述控制面板中的上移、下移按钮,启动所述电动缸带动所述第二电机移动,使得所述第四齿轮与所述第一齿轮相啮合,启动所述第二电机使得所述第一齿轮转动,从而带动所述传动杆转动,所述传动杆两端的所述第一蜗杆带动所述第一蜗轮转动,所述第一丝杆随之转动,并在滚珠螺母的配合下实现所述移动支腿的上下移动,调节好合适的高度;
23、s3:随后调节所述控制面板的前移、后移按钮,启动所述微型电机转动所述第二丝杆,所述桌板通过滚珠螺母在所述第二丝杆上移动到合适的位置,并使得所述抵触板位于学生胸部前方位置,此时所述监测摄像头始终追踪并面向学生面部随时记录距离数据,按下所述控制面板上的记忆开关,保存下此时的桌板高度、位置以及学生与所述桌板之间的合适距离;
24、s4:当学生弓背使得面部与所述翻转板之间的距离超出所保存的数值时,所述第三电机带动与所述第六齿轮啮合的所述第五齿轮转动,从而所述第四转轴转动并缠绕收缩所述肩带以矫正学生坐姿,所述监测摄像头监测坐姿符合后所述第三电机停止运行;
25、s5:学生想要阅读时,调节所述控制面板的上转、下转按钮,启动所述电动缸带动所述第二电机移动,使得所述第四齿轮与所述第二齿轮相啮合,启动所述第二电机使得所述第二齿轮与所述第二蜗杆转动,从而带动所述第二蜗轮转动,所述第三转轴以及所述第三丝杆随之转动,所述铰接座通过滚珠螺母在所述第三丝杆上移动,所述支撑杆把所述翻转板顶起到学生合适的位置,然后把所述挡杆打开并把书本放上去;
26、s6:当学生身体不注意前倾时,胸部会抵住所述抵触板向前移动,所述滑动板与所述滑动杆被带动向前移动,使得所述齿条与所述第三齿轮相啮合,并驱动所述第三齿轮转动,从而转动所述第二蜗杆,所述第二蜗杆带动所述第二蜗轮以及所述第三转轴转动,从而使得所述铰接座向前移动使得所述翻转板向下翻转调小角度,以保持书本与学生之间的距离、角度,当学生矫正坐姿时,所述滑动杆与所述齿条在所述弹簧反弹作用下复位,同时会带动所述第三齿轮反转,所述第二蜗杆又带动所述第二蜗轮反转,所述铰接座向后移动使得所述翻转板翻转到原位置;
27、s7:当所述监测摄像头监测到学生面部转动没有正对所述翻转板时,所述第一电机启动带动所述主锥型齿转动,并带动与之啮合的所述第一锥型齿与所述第二锥型齿转动,所述第一锥型齿带动所述第一转轴转动,所述第二锥型齿带动所述第二转轴转动,所述第一转轴与所述第二转轴转动方向相反,所述第一转轴与所述第二转轴均带动分别与之相连接的所述第一齿轮转动,所述第一齿轮与所述弧形齿条啮合,使得所述固定支腿、所述移动支腿以及所述桌板实现角度转动,让学生面部始终正对着所述翻转板。
28、与现有技术相比,本发明的有益效果是:
29、1、通过调节控制面板中的上移、下移按钮,启动升降组件,实现桌板高度调节功能,当没电时,还可以通过手摇杆手动进行调节,确保学生能够正常实用学习桌;
30、2、随后调节控制面板的前移、后移按钮,启动平移组件,实现桌板前后移动的功能,监测摄像头始终追踪并面向学生面部随时记录距离数据,按下控制面板上的记忆开关,可以保存下此时的桌板高度、位置以及学生与桌板之间的距离;
31、3、当学生弓背使得面部与翻转板之间的距离超出所保存的数值时,第三电机带动与第六齿轮啮合的第五齿轮转动,从而第四转轴转动并缠绕收缩肩带以矫正学生坐姿;
32、4、当学生身体不注意前倾时,胸部会抵住抵触板向前移动,经过防近视组件,使得使得翻转板向下翻转调小角度,以保持书本与学生之间的距离、角度,当学生矫正坐姿时,滑动杆与齿条在弹簧反弹作用下复位,同时会带动第三齿轮反转,第二蜗杆又带动第二蜗轮反转,铰接座向后移动使得翻转板翻转到原位置;
33、5、当监测摄像头监测到学生面部转动没有正对翻转板时,启动角度调节组件,实现桌板角度转动功能,让学生面部始终正对着翻转板;
34、6、监测摄像头能够时刻监测学生坐姿,当学生坐姿不正时,监测摄像头会反馈信号让plc控制板控制相应的部件对学习桌、座椅进行调节,以确保学生能够保持良好的学习姿态。
- 还没有人留言评论。精彩留言会获得点赞!