一种洗地机、洗地机的助力方法、装置及计算机设备与流程
本发明涉及电器设备,具体涉及一种洗地机、洗地机的助力方法、装置及计算机设备。
背景技术:
1、随着产品智能化程度的不断提升,洗地机的便利性也得到很大的提升,洗地机逐渐将助力功能作为提升用户体验的重要指标。但是目前洗地机均采用恒定的助力速度进行助力,用恒定的助力速度进行助力时,会存在以下两种不好的体验:(1)助力速度过快,清洗效果不佳;(2)助力速度过慢,虽然清洗效果提升了,但是用户对助力的体验度降低。
技术实现思路
1、有鉴于此,本发明提供了一种洗地机、洗地机的助力方法、装置及计算机设备,以解决采用恒定的助力速度进行助力时对地面清洁效果不佳或者用户对助力体验度下降的问题。
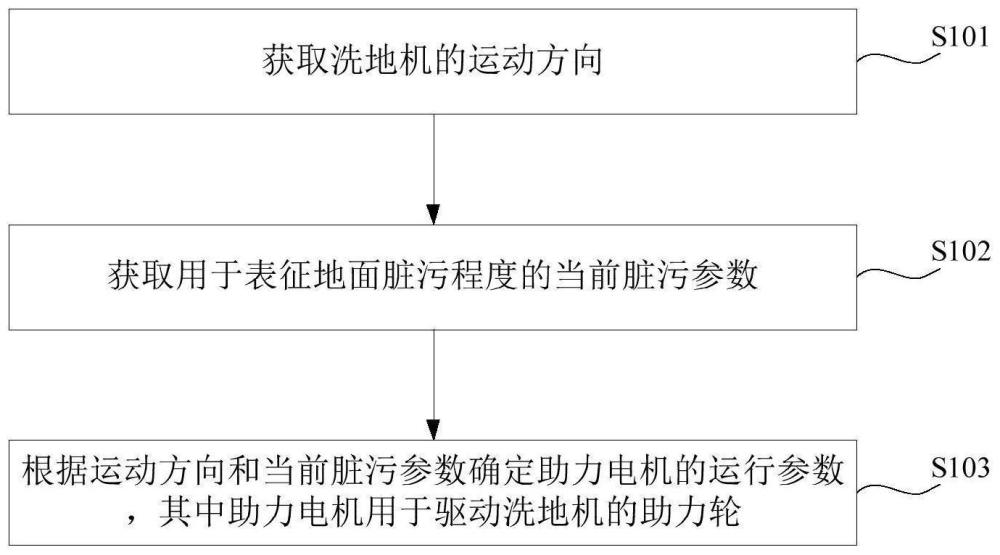
2、第一方面,本发明实施例提供了一种洗地机的助力方法,包括以下步骤:获取洗地机的运动方向;获取用于表征地面脏污程度的当前脏污参数;根据运动方向和当前脏污参数确定助力电机的运行参数,其中助力电机用于驱动洗地机的助力轮。
3、本发明实施例提供的洗地机的助力方法,通过获取洗地机的运动方向和用于表征地面脏污程度的当前脏污参数,从而可以根据运动方向和当前脏污参数确定用于驱动洗地机的助力轮的助力电机的运行参数。在洗地机向前运动时,可以通过滚刷和助力轮完成向前助力;当洗地机向后运动时,可以通过助力轮完成向后助力,由于针对不同的脏污程度采用不同的电机运行参数,因此既可以保证地面的清洁效果,又可以实现良好的助力体验。
4、在一种可选的实施方式中,根据运动方向和脏污参数确定助力电机的运行参数包括:获取预设的脏污参数与脏污程度的对应关系;根据当前脏污参数、脏污参数与脏污程度的对应关系,确定地面的当前脏污程度;根据运动方向和当前脏污程度确定助力电机的运行参数。
5、由此可以方便准确的确定助力电机的运行参数。
6、在一种可选的实施方式中,根据运动方向和当前脏污程度确定助力电机的运行参数包括:当运动方向为向前运动且当前脏污程度为轻度脏污时,助力电机按照第一速度向前助力;当运动方向为向前运动且当前脏污程度为中度脏污时,助力电机按照第二速度向后助力;当运动方向为向前运动且当前脏污程度为重度脏污时,助力电机按照第三速度向后助力;其中,第二速度大于第三速度。
7、这是因为,相关技术中当洗地机向前运动时主要是由洗地机的滚刷完成向前助力。为了保证对地面的清洁效果,滚刷的转速是恒定的,洗地机工作过程中如果遇到脏污程度较严重的地面,滚刷的转速如果过高会造成向前清洗的速度太快,进而造成对地面的清洁效果较差。而本发明实施例在洗地机向前运动时,通过滚刷和助力轮共同完成助力,其中滚刷向前助力,助力轮向前助力或者向后助力,滚轮向前助力的速度是恒定的,但是助力轮助力的方向和速度与当前脏污程度相关。具体的,当当前脏污程度为轻度脏污时,助力轮向前助力;当当前脏污程度为中度脏污和重度脏污时,助力轮向后助力,并且当前脏污程度越严重,向后助力的速度越快,即当前脏污程度越严重,洗地机向前运动的越慢,由此即可以在遇到脏污程度较严重的地面时,保证对地面的清洁效果,还可以在遇到脏污程度较轻的地面时,使得用户具有良好的助力体验。
8、在一种可选的实施方式中,根据运动方向和当前脏污程度确定助力电机的运行参数包括:当运动方向为向后运动且当前脏污程度为轻度脏污时,助力电机按照第四速度向后助力;当运动方向为向后运动且当前脏污程度为中度脏污时,助力电机按照第五速度向后助力;当运动方向为向后运动且当前脏污程度为重度脏污时,助力电机按照第六速度向后助力;其中,第四速度大于第五速度,第五速度大于第六速度。
9、这是因为,相关技术中洗地机向后运动时主要是由洗地机的助力轮完成向后助力,助力轮的转速是恒定的。洗地机工作过程中如果遇到脏污程度较严重的地面,助力轮的转速过高会造成向后清洗的速度太快,进而造成对地面的清洁效果较差。而本发明实施例在洗地机向后运动时,助力轮向后助力的速度并不是恒定的,而是与当前脏污程度相关。具体的,当前脏污程度越严重,向后助力的速度越慢,即当前脏污程度越严重,洗地机向后运动的越慢,由此即可以在遇到脏污程度较严重的地面时,保证对地面的清洁效果,还可以在遇到脏污程度较轻的地面时,使得用户具有良好的助力体验。
10、在一种可选的实施方式中,当洗地机包括至少两种运行模式时,在获取洗地机的运动方向之后,还包括以下步骤:获取洗地机的当前运行模式;当洗地机的向前运动时,根据当前运行模式确定第一速度、第二速度和第三速度;当洗地机的向后运动时,根据当前运行模式确定第四速度、第五速度和第六速度。
11、由此可以在不同的运行模式下,确定不同的助力电机的运行参数。
12、在一种可选的实施方式中,获取用于表征地面脏污程度的当前脏污参数包括:获取红外传感器在预设的时间段内检测到的当前脉冲数量。
13、由此可以快速方便的获取到用于表征地面脏污程度的当前脏污参数。
14、第二方面,本发明实施例还提供了一种洗地机的助力装置,装置包括第一获取模块、第二获取模块和电机运行参数确定模块;其中第一获取模块用于获取洗地机的运动方向;第二获取模块用于获取用于表征地面脏污程度的当前脏污参数;电机运行参数确定模块用于根据运动方向和当前脏污参数确定助力电机的运行参数,其中助力电机用于驱动洗地机的助力轮。
15、本发明实施例提供的洗地机的助力装置,通过获取洗地机的运动方向和用于表征地面脏污程度的当前脏污参数,从而可以根据运动方向和当前脏污参数确定用于驱动洗地机的助力轮的助力电机的运行参数。在洗地机向前运动时,可以通过滚刷和助力轮完成向前助力;当洗地机向后运动时,可以通过助力轮完成向后助力,由于针对不同的脏污程度采用不同的电机运行参数,因此既可以保证地面的清洁效果,又可以实现良好的助力体验。
16、第三方面,本发明实施例还提供了一种计算机设备,包括存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的洗地机的助力方法。
17、第四方面,本发明实施例还提供了一种洗地机,包括第三方面的计算机设备。
18、第五方面,本发明实施例还提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的洗地机的助力方法。
技术特征:
1.一种洗地机的助力方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述运动方向和所述脏污参数确定助力电机的运行参数包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述运动方向和所述当前脏污程度确定所述助力电机的运行参数包括:
4.根据权利要求2所述的方法,其特征在于,所述根据所述运动方向和所述当前脏污程度确定所述助力电机的运行参数包括:
5.根据权利要求3或4所述的方法,当所述洗地机包括至少两种运行模式时,在获取洗地机的运动方向之后,还包括:
6.据权利要求1所述的方法,其特征在于,所述获取用于表征地面脏污程度的当前脏污参数包括:
7.一种洗地机的助力装置,其特征在于,所述装置包括:
8.一种计算机设备,其特征在于,包括:
9.一种洗地机,其特征在于,包括权利要求8所述的计算机设备。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机执行权利要求1至6中任一项所述的洗地机的助力方法。
技术总结
本发明涉及电器设备技术领域,公开了一种洗地机、洗地机的助力方法、装置及计算机设备,其中洗地机的助力方法,通过获取洗地机的运动方向和用于表征地面脏污程度的当前脏污参数,从而可以根据运动方向和当前脏污参数确定用于驱动洗地机的助力轮的助力电机的运行参数。在洗地机向前运动时,可以通过滚刷和助力轮完成向前助力;当洗地机向后运动时,可以通过助力轮完成向后助力,由于针对不同的脏污程度采用不同的电机运行参数,因此既可以保证地面的清洁效果,又可以实现良好的助力体验。
技术研发人员:杨昌勇,龚辉平,夏乙珩,翁勃,冯振华,黄圣涛
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!