传感器和清洁机器人的制作方法
本技术涉及生活电器,具体而言,涉及一种传感器和一种清洁机器人。
背景技术:
1、随着智能清洁技术的发展,智能清洁装置走进越来越多的家庭,很大程度上减轻了人们进行房屋清扫的劳动。随着智能清洁机器人迭代升级,对机器人智能化要求越来越高。
2、相关技术中,清洁机器人的沿边测距传感器采用红外线传感器方案,该方案虽然成本低,性能优,但由于结构设置不合理,存在测量范围不足的问题。
技术实现思路
1、本实用新型旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、为此,本实用新型第一方面提出了一种传感器。
3、本实用新型第二方面提出了一种清洁机器人。
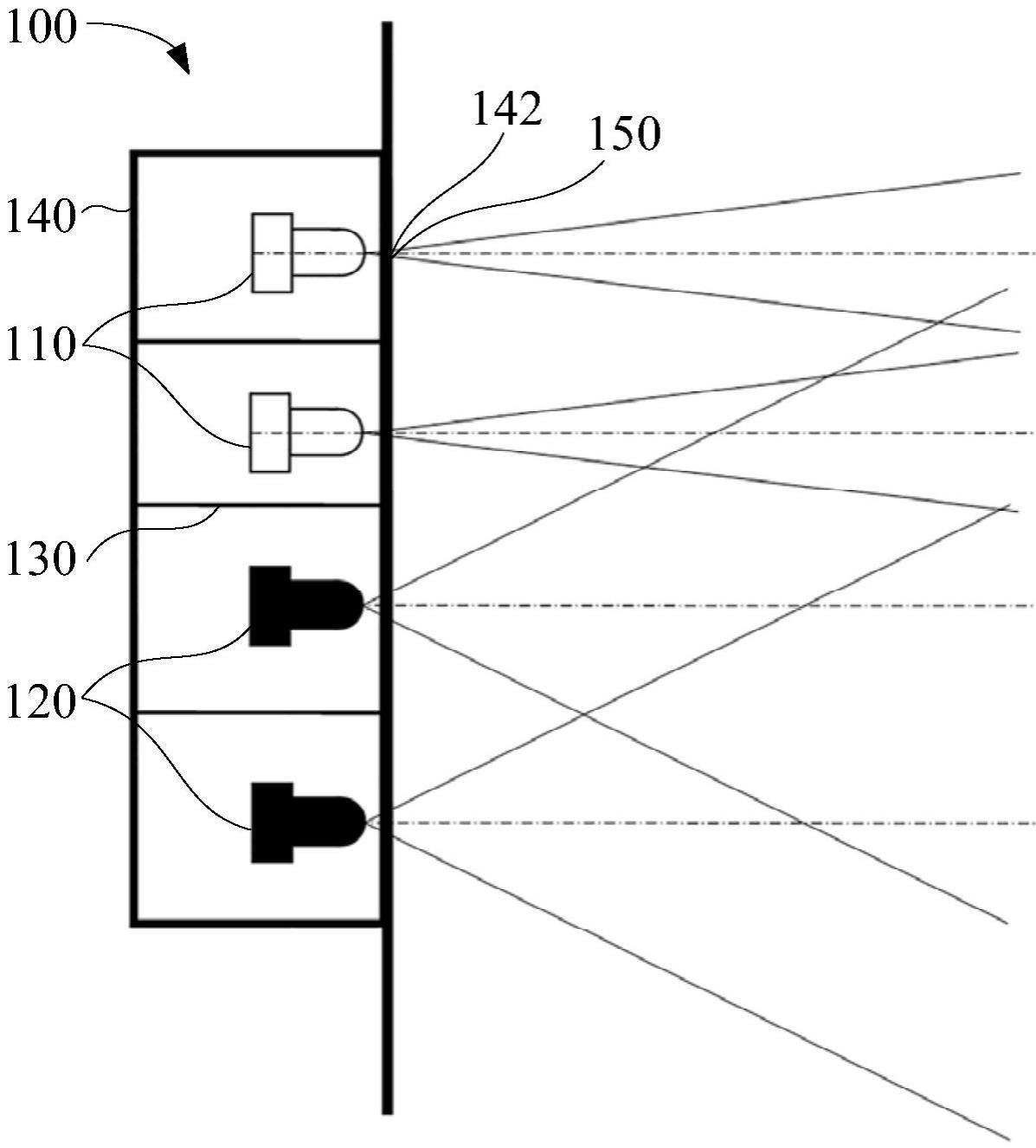
4、有鉴于此,本实用新型提出了一种传感器,包括:至少两个信号发射器,用于向障碍物发射信号,任意两个信号发射器的视场轴不共线;至少两个信号接收器,至少两个信号接收器用于同时接收任一信号发射器发射的经障碍物反弹后的信号,以及用于根据信号的强度确定障碍物与信号发射器之间的距离。
5、本实用新型提供的传感器为测距传感器,传感器包括至少两个信号发射器和至少两个信号接收器。信号发射器用于向障碍物发射信号,信号发射器发射的信号可以为红外线信号,信号接收器用于接收信号发射器发射的经过障碍物反弹之后的信号,当信号发射器向障碍物发射的是红外线信号时,信号接收器能够接收到反弹后的红外线信号,进而根据信号的强度确定障碍物与信号发射器之间的距离,实现测距。
6、具体地,为了提高信号发射器的发射信号的覆盖范围,传感器包括至少两个信号发射器,至少两个信号发射器交替运行,并且任意两个信号发射器的视场轴不共线,视场轴不共线的两个信号发射器的信号覆盖范围大于单个信号发射器。传感器还包括至少两个信号接收器,当信号接收器为两个时,两个信号接收器同时工作,以接收任一个信号发射器发射的经过障碍物反弹之后的信号。需要说明,在传感器内预先存储有不同距离下,两个信号接收器接收到的信号强度信息比值,通过计算当前两个信号接收器接收到的信号强度信息比值,与存储在传感器内的信号强度信息比值进行对比,进而实现根据信号的强度确定障碍物与信号发射器之间的距离。
7、本技术提供的传感器通过设置至少两个信号发射器和至少两个信号接收器,至少两个信号发射器交替运行,并且任意两个信号发射器的视场轴不共线,提高了传感器的探测范围,解决了相关技术中传感器采用单个信号发射器探测范围不足的问题,有效地扩大了传感器的识别范围,提升了用户的使用体验。
8、另外,本实用新型提供的上述实施例中的传感器还可以具有如下附加技术特征:
9、在上述技术方案中,进一步地,至少两个信号发射器的视场轴之间的角度大于0度且小于90度。
10、在该技术方案中,为了进一步增加信号发射器信号发射的覆盖范围,将至少两个信号发射器的视场轴之间的角度设置为大于0度且小于90度。可以理解,当两个信号发射器的视场轴之间的角度为0度时,两个信号发射器的视场轴相平行,此时,两个信号发射器信号发射的覆盖范围较小,当两个信号发射器的视场轴之间的角度为90度时,两个信号发射器的视场轴相垂直,此时,两个信号发射器各自工作,不能很好的扩大信号在单侧的覆盖范围。
11、通过将至少两个信号发射器的视场轴之间的角度设置为大于0度且小于90度,进一步增加了信号发射器信号发射的覆盖范围,提升了用户的使用体验和产品的竞争力。
12、在上述任一技术方案中,进一步地,至少两个信号接收器的视场轴之间的角度大于0度且小于90度。
13、在该技术方案中,将至少两个信号接收器的视场轴之间的角度大于0度且小于90度。也就说,至少两个信号接收器的视场轴之间的角度保持在0度到90度之间,至少两个信号接收器的视场轴既不平行也不垂直,可以使两个信号接收器接收到的信号强度的比值随距离的变化变得更加敏感,进而提高传感器的测距精度。
14、在上述任一技术方案中,进一步地,信号接收器的视场角大于信号发射器的视场角。
15、在该技术方案中,信号接收器的视场角大于信号发射器的视场角。可以理解,如果信号接收器的视场角小于信号发射器的视场角,则会出现信号接收器接收不到信号或者接收信号不全的情况,导致测距效果不理想。
16、本技术为保证信号接收器具有更大的接收范围,将信号接收器的视场角设置为大于信号发射器的视场角,一方面,信号发射器具有相对较小的视场角,可以减少信号散发,保证信号的强度,另一方面,信号接收器具有相对较大的视场角可以扩大信号接收器的接收范围,使信号接收器能够更好的接收来自信号发射器的信号,从而保证传感器的测距精度。
17、在上述任一技术方案中,进一步地,信号发射器的视场角大于等于5度且小于等于20度。
18、在该技术方案中,将信号发射器的视场角设置为大于等于5度,主要是考虑到当信号发射器的视场角小于5度时,虽然信号较为集中,但是信号覆盖的范围较小,当信号发射器的视场角大于20度时,虽然信号覆盖的范围较大,但信号散发严重,影响信号强度。
19、通过将信号发射器的视场角大于等于5度且小于等于20度,即保证了信号的集中度,使发射的信号具有合适的强度,同时还保证了信号的覆盖范围。
20、在上述任一技术方案中,进一步地,至少两个信号发射器和至少两个信号接收器依次间隔分布。
21、在该技术方案中,将至少两个信号发射器和至少两个信号接收器依次间隔分布。具体地,将至少两个信号发射器间隔分布,可以根据实际的需要,将至少两个信号发射器按照从高到低的方向间隔设置,能够提高信号发射的覆盖范围,同时也避免信号之间的相互影响。将至少两个信号接收器依次间隔分布,以保证信号接收器可以在两个不同的位置接收信号,进而根据不同信号接收器接收到的信号强度的比值确定障碍物与信号发射器之间的距离。
22、在上述任一技术方案中,进一步地,信号发射器与信号接收器交替排布。
23、在该技术方案中,信号发射器可以与信号接收器相互交替排布,有效避免了将信号发射器相邻设置,发射器视场重合部分较大的问题,发射器相邻设置会出现信号发射器视场重合的部分信号浪费的情况。
24、通过将信号发射器与信号接收器交替排布,减少了发射器视场重合的部分,提高了信号的覆盖范围和信号利用率。
25、在上述任一技术方案中,进一步地,传感器还包括:多个隔光板,相邻两个信号发射器、相邻两个信号接收器以及相邻的信号发射器与信号接收器之间均设置有隔光板。
26、在该技术方案中,传感器还包括多个隔光板,隔光板可以起到很好的隔光效果,可以避免信号间的相互影响。具体地,相邻两个信号发射器之间设置隔光板,可以避免信号在两个信号发射器间窜扰,相邻两个信号接收器之间设置隔光板,可以避免信号在两个信号接收器间窜扰,相邻的信号发射器与信号接收器之间也设置隔光板。通过设置多个隔光板,可以有效的避免信号在传感器内部产生窜扰,保证传感器测距精度。
27、在上述任一技术方案中,进一步地,传感器还包括:壳体,信号发射器和信号接收器设置于壳体内,壳体的一侧设置有开口,信号发射器的发射端朝向开口,信号接收器的接收端朝向开口:滤光板,滤光板覆盖于开口上。
28、在该技术方案中,传感器还包括壳体和滤光板,壳体用于保护信号发射器和信号接收器,滤光板用于滤除多余光线。具体地,信号发射器和信号接收器设置于壳体内,壳体可以将信号发射器和信号接收器与外部设备隔离,从而有效的保护设置在其内部的信号发射器和信号接收器。壳体的一侧设置有开口,开口用于信号的通过,信号发射器的发射端朝向开口,信号发射器可以朝向开口方向发射信号。信号接收器的接收端朝向开口,信号接收器可以接收从开口进入的信号。
29、进一步地,滤光板覆盖于开口上,滤光板可以滤除多余光线,当信号发射器发射的信号为红外线信号时,滤光板可以滤除其他光线,只保留红外线,减小其他光线的影响,保证传感器的测距精度。
30、本实用新型的第二方面提出了一种清洁机器人,包括:如上述任一项技术方案的传感器。
31、本实用新型提出的清洁机器人包括如上述任一项技术方案的传感器,因而具有传感器的全部有益效果,在此不再赘述。
32、在上述技术方案中,进一步地,清洁机器人还包括:主体,传感器设置于主体的侧壁上,用于测量主体与障碍物之间的距离;其中,至少一个信号发射器的视场轴朝向主体的底壁倾斜。
33、在该技术方案中,清洁机器人还包括主体,主体用于支持清洁机器人完成常规的清洁任务。在主体的侧壁上设置有传感器,设置于主体的侧壁上传感器用于测量主体与侧方障碍物之间的距离,使清洁机器人可以更好的感知自身与侧方障碍物之间距离的远近,便于清洁机器人绕开障碍物,或者沿着障碍物固定距离的行走。
34、进一步地,至少一个信号发射器的视场轴朝向主体的底壁方向倾斜,一般情况下,清洁机器人都是在地面上作业,将至少一个信号发射器的视场轴朝向主体的底壁方向倾斜,可以实现对地面障碍物的测距。
35、在上述任一技术方案中,进一步地,传感器的数量为多个,多个传感器的至少一部分设置于主体的底壁上,用于测量主体与地面之间的距离。
36、在该技术方案中,传感器的数量为多个。在清洁机器人上设置多个传感器,可以有效的提高测距的范围。多个传感器中的至少一部分传感器设置于主体的底壁上,一般情况下,清洁机器人都是在地面上作业,将一部分传感器设置于主体的底壁上,能够测量主体与地面之间的距离,实现对地面障碍物的测距。
37、在上述任一技术方案中,进一步地,清洁机器人还包括:万向轮,设置于主体的底壁上,多个传感器中的一个传感器靠近万向轮设置。
38、在该技术方案中,清洁机器人还包括万向轮,万向轮主要用于方便清洁机器人改变作业方向。具体地,万向轮设置于主体的底壁上,当清洁机器人在清洁作业过程中,需要绕开障碍物时,万向轮可以使清洁机器人改变方向更加容易。
39、进一步地,多个传感器中的一个传感器靠近万向轮设置,本技术在万向轮附近设置一个传感器即可,可以有效的降低设备成本。
40、在上述任一技术方案中,进一步地,清洁机器人还包括至少一个支架,设置于主体上,信号发射器和信号接收器位置可调节地设置于至少一个支架上。
41、在上述任一技术方案中,进一步地,清洁机器人还包括多个电机,设置于主体上,多个电机的输出轴分别与信号发射器和信号接收器相连接,多个电机用于调节信号发射器和信号接收器的角度。
42、本实用新型的附加方面和优点将在下面的描述部分中变得明显,或通过本实用新型的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!