清洁机器人的制作方法
本技术属于清洁设备,具体涉及一种清洁机构和清洁机器人。
背景技术:
1、随着社会经济的发展以及家庭生活水平的提高,家居清洁逐步进入智能化、机器化的时代,应运而生的清洁机器人能够将人们从家居清洁工作中解放出来,有效减轻人们在家居清洁方面的工作负担,缓解人们在进行家居清洁过程中的劳累程度。
2、通常而言,清洁机器人通过旋转的清洁组件擦拖待清洁面,而进行待清洁的清洁。因清洁组件的清洁盘和清洁件不超出机身范围设置,致使清洁机器人沿边清洁时清洁效果较差。
技术实现思路
1、因此,本实用新型所要解决的技术问题是清洁机器人沿边清洁时清洁效果较差。
2、为解决上述技术问题,本实用新型提供一种清洁机构,包括:
3、清洁模组,所述清洁模组包括驱动模块和清洁组件,所述驱动模块与所述清洁组件连接、而用于驱动所述清洁组件旋转;
4、连接件,所述连接件与所述驱动模块连接;以及
5、传动件,所述传动件与所述驱动模块转动连接,且与所述连接件连接;
6、其中,所述传动件可绕转动轴线转动,而通过所述连接件联动所述驱动模块绕所述转动轴线转动,所述转动轴线与所述清洁组件的旋转轴线平行。
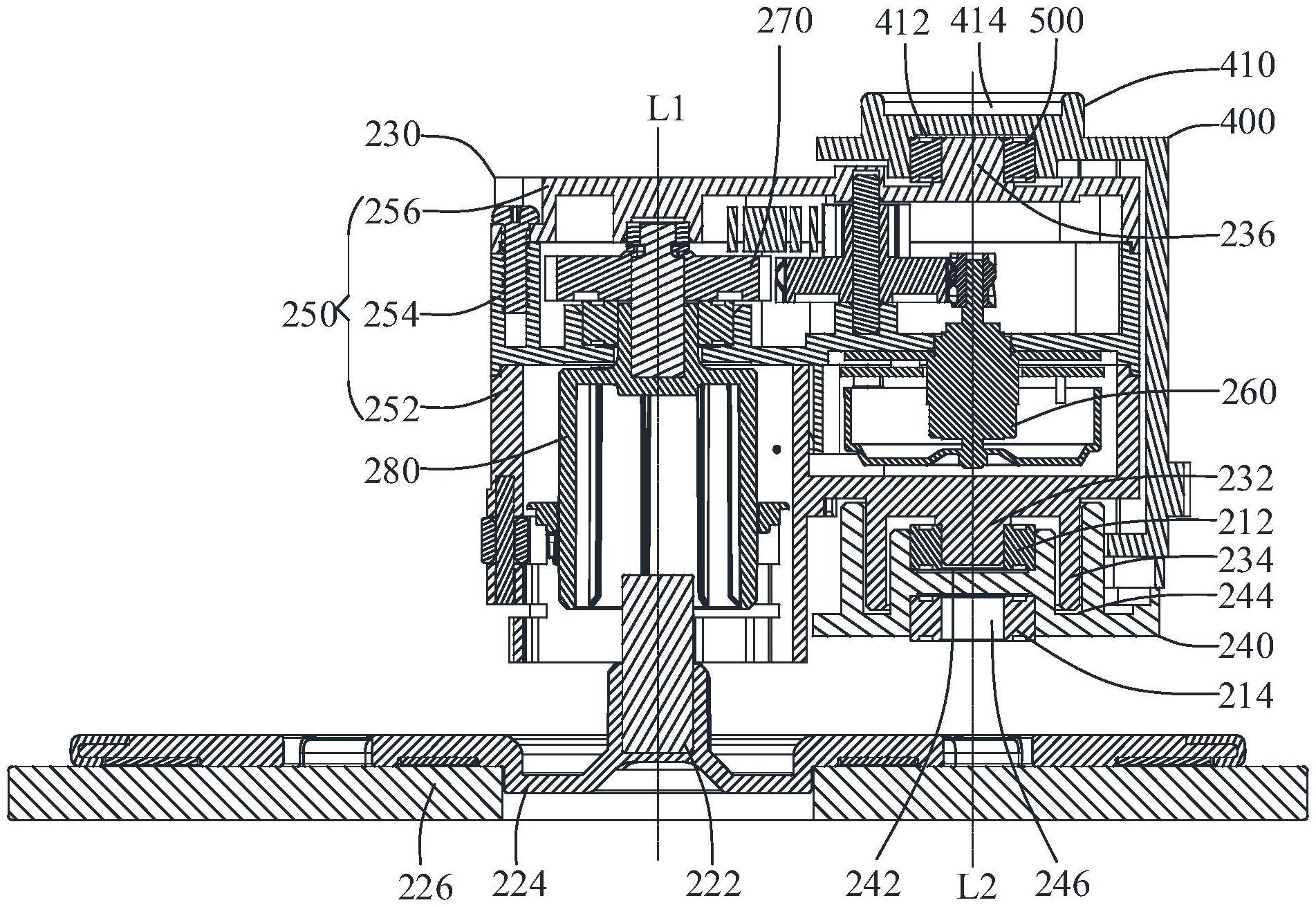
7、可选地,所述的清洁机构,所述传动件具有第一端和第二端;所述驱动模块包括驱动主体和旋转件,所述旋转件的一端可旋转设于所述驱动主体朝向所述清洁组件的一侧;所述第一端与所述驱动主体的另一侧枢接,所述第二端与所述旋转件固接。
8、可选地,所述的清洁机构,所述驱动主体的一侧设有第一轴接部,所述旋转件的一端设有第二轴接部,所述第二轴接部与所述第一轴接部轴向插接配合;所述驱动模块还包括第一轴承,所述第一轴承固接于所述第一轴接部和所述第二轴接部之间。
9、可选地,所述的清洁机构,所述驱动主体的一侧还设有第一套接部,所述第一套接部同轴环绕所述第一轴接部设置;所述旋转件的一端还设有第二套接部,所述第二套接部同轴环绕所述第二轴接部设置,所述第二套接部与所述第一套接部轴向插接配合。
10、可选地,所述的清洁机构,所述旋转件的另一端设有第三轴接部,所述第三轴接部与所述第二轴接部同轴设置,且相互间隔。
11、可选地,所述的清洁机构,所述驱动模块还包括第二轴承,所述第二轴承与所述第三轴接部固接。
12、可选地,所述的清洁机构,所述第一端设有第一枢接部,所述驱动主体的另一侧设有第二枢接部,所述第二枢接部与第一枢接部轴向插接配合。
13、可选地,所述清洁机构还包括第三轴承,所述第三轴承固接于所述第一枢接部和所述第二枢接部之间。
14、可选地,所述的清洁机构,所述传动件的外侧面设有轮齿。
15、可选地,所述的清洁机构,所述连接件为弹性件,所述连接件的一端连接所述驱动模块,所述连接件的另一端连接所述传动件。
16、可选地,所述的清洁机构,所述连接件为拉簧。
17、可选地,所述的清洁机构,所述驱动主体包括第一电机和传动机构,所述传动机构分别连接所述第一电机和所述清洁组件;其中,所述第一电机的中心轴线位于所述转动轴线上。
18、本实用新型还提供一种清洁机器人,包括如上所述的清洁机构、机壳以及驱动组件,所述清洁机构设于所述机壳;所述驱动组件设于所述机壳,且与所述传动件连接,所述驱动组件用于驱动所述传动件转动,而转动所述驱动模块,使所述清洁组件在初始位置和沿边位置之间运动,所述沿边位置为前进方向上所述清洁组件的至少部分伸出所述机壳的最大宽度的位置。
19、可选地,所述清洁机器人还包括:
20、检测器,所述检测器设于所述机壳,用于检测所述传动件的位置;和
21、控制器,所述控制器设于所述机壳,且分别与所述检测器、所述驱动组件电性连接,所述控制器根据所述检测器检测到的位置控制所述驱动组件。
22、可选地,所述的清洁机器人,所述传动件设有限位部,所述限位部可与所述驱动组件配合,而用于限制所述传动件的转动。
23、本实用新型还提供一种清洁机器人,包括:
24、机壳;
25、至少一个清洁组件,所述清洁组件具有初始位置和沿边位置,且能够相对于所述机壳在所述初始位置和沿边位置之间运动;
26、连接件,用于驱动所述清洁组件朝向所述沿边位置运动;
27、在所述沿边位置,所述清洁组件遇到障碍时,所述清洁组件朝向所述初始位置内缩;所述清洁组件离开障碍时,在所述连接件的作用下,所述清洁组件恢复至所述沿边位置。
28、可选地,上述的清洁机器人,在所述沿边位置,所述清洁组件遇到障碍时,所述清洁组件朝向所述初始位置内缩,直至所述初始位置。
29、可选地,上述的清洁机器人,所述连接件包括至少一个弹性件。
30、可选地,上述的清洁机器人,所述弹性件为压缩弹簧,所述清洁组件遇到障碍时,所述清洁组件朝向所述初始位置内缩,所述压缩弹簧受压收缩变形;所述清洁组件离开障碍时,在所述压缩弹簧的作用下,所述清洁组件恢复至所述沿边位置;或者
31、所述弹性件为拉簧,所述清洁组件遇到障碍时,所述清洁组件朝向所述初始位置内缩,所述拉簧拉伸变形;在所述清洁组件离开障碍时,在所述拉簧的作用下,所述清洁组件恢复至所述沿边位置;或者
32、所述弹性件为扭簧,所述清洁组件遇到障碍时,所述清洁组件朝向所述初始位置内缩,所述扭簧扭曲变形;在所述清洁组件离开障碍时,在所述扭簧的作用下,所述清洁组件恢复至所述沿边位置。
33、可选地,上述的清洁机器人,所述弹性件为至少两个,任意一个所述弹性件为拉簧、扭簧、压缩弹簧中的一个。
34、可选地,上述的清洁机器人,还包括驱动主体和传动件;
35、其中,所述驱动主体包括壳体及第一电机,所述第一电机设在所述壳体上,且用于驱动所述清洁组件旋转;
36、所述连接件的一端连接于所述壳体,另一端连接于所述传动件;
37、所述传动件转动,带动所述连接件移动,联动带动所述壳体和清洁组件摆动,以使所述清洁组件在所述初始位置和沿边位置之间运动。
38、可选地,上述的清洁机器人,所述清洁组件处于所述初始位置时,所述清洁组件未伸出所述机壳的最大宽度;和/或
39、所述清洁组件处于所述沿边位置时,所述清洁组件的至少部分伸出所述机壳的最大宽度。
40、本实用新型还提供一种清洁机器人,包括
41、机壳;
42、至少一个清洁组件,所述清洁组件至少具有沿边位置;
43、连接件;
44、所述清洁组件处于沿边位置时,所述连接件具有缓冲作用,当所述清洁组件遇到障碍物时,在所述连接件的缓冲作用下,所述清洁组件能够相对于所述机壳内缩,以缓冲所述清洁组件与障碍物的碰撞。
45、本实用新型还提供一种清洁机器人,
46、机壳;
47、至少一个清洁组件,所述清洁组件包括清洁盘,所述清洁盘具有伸出所述机壳外的沿边状态;
48、连接件;
49、所述清洁盘处于所述沿边状态下,当所述清洁盘遇到障碍物时,在所述连接件的缓冲作用下,所述清洁盘能够相对于所述机壳内缩,以缓冲所述清洁盘与障碍物的碰撞;在所述清洁盘离开障碍物时,所述连接件能够使所述清洁盘保持恢复到所述沿边状态的趋势。
50、可选地,上述的清洁机器人,所述清洁盘处于非沿边状态时,所述清洁盘未伸出所述机壳的最大宽度;和/或
51、所述清洁盘处于沿边状态时,所述清洁盘的至少部分伸出所述机壳的最大宽度。
52、本实用新型还提供一种清洁机器人,包括
53、机壳,所述机壳设有安装腔;
54、至少一个清洁组件,位于所述机壳的下方;所述清洁组件具有沿边状态和非沿边状态;
55、驱动主体,设在所述安装腔内;所述驱动主体包括壳体,及设在所述壳体上的第一电机;所述第一电机用于驱动所述清洁组件旋转;
56、传动件,设在所述安装腔内;
57、弹性件,至少一端与所述壳体连接;
58、所述传动件转动,带动所述弹性件移动,以带动所述壳体和所述清洁组件朝向所述机壳外伸出或朝向所述机壳内内缩,以使所述清洁组件在所述沿边状态和所述非沿边状态之间切换;
59、在所述沿边状态下,所述弹性件具有缓冲作用,以缓冲所述清洁组件与障碍物的碰撞。
60、可选地,上述的清洁机器人,在所述沿边状态下,所述清洁组件遇到障碍物时,在所述弹性件的缓冲作用下,所述清洁组件朝向所述机壳内内缩;所述清洁组件离开障碍物时,在所述弹性件的作用下,所述清洁组件恢复至所述沿边状态。
61、本实用新型提供的技术方案,具有以下优点:
62、通过增设传动件和连接件,传动件与清洁模组的驱动模块转动连接,连接件连接于驱动模块和传动件之间,由于传动件可绕转动轴线转动,传动件转动时,带动连接件移动,而联动驱动模块绕转动轴线转动,进而清洁模组的清洁组件可绕转动轴线偏心转动。应用于清洁机器人时,通过控制传动件的转动,而控制清洁组件的摆动,即清洁组件可在初始位置和沿边位置之间运动,当清洁组件位于沿边位置时,能够将清洁件摆出,而覆盖到机身范围,实现沿边清洁,提高了清洁机器人沿边清洁时的清洁效果,解决了清洁组件不能贴边清洁的问题。
- 还没有人留言评论。精彩留言会获得点赞!