边界检测模组的制作方法
本发明涉及智能清洁设备,特别涉及一种用于在清洁机器人工作过程中对待清洁平面的边界位置进行检测的边界检测模组。
背景技术:
1、中国专利文献cn114869164a公开了一种吸附式平面清洁机器人,其在壳体的外周边缘处设置有多个凸出的检测模组,检测模组既用于无框玻璃的边缘检测,又用于有框玻璃的边框检测。清洁机器人吸附于玻璃面上后,杆状部底端的探珠会被弹簧推抵在玻璃表面,当机器人行走至玻璃边缘处时,探珠从玻璃边缘滑脱,致使杆状部顶端的第一挡片与传感器的相对位置发生变化以阻断或改变传感器原先的信号传输路径,触发传感信号。当清洁机器人行走过程中出现碰撞套与窗框发生挤撞的情况时,碰撞套产生水平位移,其内周面的斜推台阶推动位移套在竖直方向上位移,使得设置在位移套顶端的第二挡片与传感器的相对位置发生变化进而触发传感信号。
2、中国专利文献cn110250987a公开了一种擦窗机器人,在机器人本体的四个边角处设置有触发式到边检测装置,到边检测装置也是既用于无框玻璃的边缘检测,又用于有框玻璃的边框检测。其中,无框玻璃的边缘检测方式与cn114869164a类似,通过在探杆的顶端设置压板,当探杆带动压板往下移动时将触发第二微动开关形成边缘感应信号,边框检测则是通过摆臂自由端触边摆动时碰触第一微动开关来形成碰撞感应信号。
3、以上能够同时用于无框玻璃与有框玻璃边界检测的模组结构较为复杂,复杂的结构会影响检测模组的工作稳定性与可靠性,同时也导致检测模组的组装效率偏低,制造成本较高。
技术实现思路
1、本发明的目的之一是在不丧失功能性的前提下,通过对检测模组的检测方式及结构进行改进,进而降低工厂的制造成本,提高生产效率。
2、为了实现上述目的,本发明涉及的边界检测模组包括:
3、第一检测部件,连接清洁机器人的壳体并被配置为当受挤碰时相对于壳体沿第一方向移动;
4、第二检测部件,活动安装在第一检测部件上并被配置为在清洁机器人工作过程中抵靠住待清洁面且当其移动至待清洁面边缘外侧时相对于第一检测部件沿不同于第一方向的第二方向移动;
5、触发部件,设置在所述第二检测部件上且于第二检测部件抵靠住待清洁面以及第一检测部件未受挤碰时处于第一位置;
6、感应器,固定安装在清洁机器人的壳体上,且被配置为当所述第一检测部件沿第一方向移动并带动触发部件从第一位置移动至第二位置或者第二检测部件沿第二方向移动并带动触发部件从第一位置移动至第三位置时产生感应信号。
7、其中,所述第一方向位于与待清洁面平行的平面内,所述第二方向垂直于待清洁面;
8、所述触发部件上设置有第一触发部和第二触发部,所述触发部件从第一位置移动至第二位置时由第一触发部触发感应器产生感应信号,所述触发部件从第一位置移动至第三位置时由第二触发部触发感应器产生感应信号。
9、其中,所述感应器可以采用反射式传感器或遮断式传感器,所述第一触发部与第二触发部通过阻断或改变传感器原先的信号传输路径来触发感应信号。
10、于本发明中,所述感应器为反射式传感器或遮断式传感器;
11、所述触发部件包括第一触发部与第二触发部;
12、所述触发部件处于第一位置时,所述第一触发部位于感应器的信号传输路径的后侧,所述第二触发部位于感应器的信号传输路径的上方;
13、所述触发部件从第一位置移动至第二位置的过程中,所述第一触发部件沿第一方向往前移动直至与原先的信号传输路径发生干涉,由此阻断或改变传感器原先的信号传输路径并触发感应信号;所述挡板从第一位置移动至第三位置的过程中,所述第二触发部件沿第二方向往下移动直至与原先的信号传输路径发生干涉,由此阻断或改变传感器原先的信号传输路径并触发感应信号。
14、进一步地,所述第一检测部件包括连接清洁机器人壳体的支座,所述支座被限制为受挤碰后能够相对于壳体沿第一方向移动并在所受挤碰作用力撤销后复位;
15、所述第二检测部件包括活动连接于支座并被限制为仅能够相对于支座沿垂直于待清洁面的第二方向来回移动的杆件以及用于向杆件施加作用力以使其底端抵靠住待清洁面的弹性部件;
16、所述触发部件为固定设置在杆件顶端的挡板,所述挡板上设置第一触发部与第二触发部。
17、于本发明一实施例中,边界检测模组还包括连接臂,所述支座通过连接臂与清洁机器人壳体固定连接,所述连接臂被配置为于支座受挤碰时产生弹性形变并约束支座相对于壳体沿第一方向移动,以及在挤碰作用力撤销后促使所述支座复位。
18、进一步地中,前述边界检测模组除了包含连接臂外还包括复位部件,所述支座通过连接臂与清洁机器人壳体活动连接,所述连接臂与清洁机器人壳体上设置相配合的转轴与轴孔,所述转轴与的轴心位于支座外侧,所述支座被限制为在其受挤碰时以转轴为中心相沿第一方向偏转,并在此过程中致使所述复位部件产生弹性形变,所述复位部件被配置为在挤碰作用力撤销后带动支座与连接臂复位。
19、其中,所述复位部件包括自连接臂上延伸出来的弹片,所述弹片的自由端抵靠住清洁机器人壳体,所述支座带动连接臂转动的过程中致使弹片产生弹性变形,所述弹片用于在挤碰作用力撤销后带动支座与连接臂复位。
20、于本发明另一实施例中,所述第一检测部件还包括滑轨及复位部位,所述滑轨固定连接于壳体且滑轨的延伸方向与第一方向一致,所述支座活动连接于滑轨,所述复位部件连接支座,所述支座被限制为在其受挤碰时沿滑轨移动,并在此过程中致使所述复位部件产生弹性形变,所述复位部件被配置为在挤碰作用力撤销后带动支座复位。
21、作为一种优选的实施方案,上述边界检测模组还可以包括环套在支座外部的滚轮,所述滚轮与支座连接且轴向开设通孔,所述第二检测部件的底端从通孔中穿出。
22、上述边界检测模组既适用于有框玻璃的边界检测,又适用于无框玻璃的边界检测。当采用该边界检测模组的清洁机器人移动至有框玻璃的边缘处时,第一检测部件与玻璃的边框发生挤碰,第一检测部件将沿第一方向相对于壳体移动并带动触发部件从第一位置移动至第二位置,由此触发感应器产生感应信号。当采用该边界检测模组的清洁机器人移动至无框玻璃的边缘处时,原本抵靠住玻璃表面的第二检测部件将从玻璃边缘外侧滑落,失去玻璃支撑作用后,第二检测部件沿第二方向移动并带动触发部件从第一位置移动至第三位置,由此触发感应器产生感应信号。
23、与现有的边界检测模组不同,本发明利用可相对于清洁机器人壳体移动的第一检测部件和第二检测部件带动触发部件(触发部件设置在第二检测部件上)从不触发感应信号的第一位置分别对应移动至触发感应信号的第二位置与第三位置,实现了仅采用一个感应器与一个触发部件就可对有框玻璃与无框玻璃进行边界检测,边界检测模组的结构简单,工作稳定性与可靠性更高,并且能够大幅提高工厂的组装效率,降低检测模组的制造成本。
技术特征:
1.边界检测模组,其特征在于:包括:
2.如权利要求1所述边界检测模组,其特征在于:
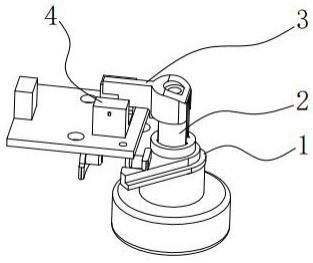
3.如权利要求2所述边界检测模组,其特征在于:所述感应器(4)为反射式传感器或遮断式传感器,所述第一触发部(3a)与第二触发部(3b)通过阻断或改变感应器(4)原先的信号传输路径来触发感应信号。
4.如权利要求1所述边界检测模组,其特征在于:
5.如权利要求4所述边界检测模组,其特征在于:
6.如权利要求5所述边界检测模组,其特征在于:所述第一检测部件(1)还包括连接臂(1b),所述支座(1a)通过连接臂(1b)与壳体(a)固定连接,所述连接臂(1b)被配置为于支座(1a)受挤碰时产生弹性形变并约束支座(1a)相对于壳体(a)沿第一方向移动,以及在挤碰作用力撤销后促使所述支座(1a)复位。
7.如权利要求5所述边界检测模组,其特征在于:所述第一检测部件(1)还包括连接臂(1b)及复位部件,所述支座(1a)通过连接臂(1b)与壳体(a)活动连接,所述连接臂(1b)与壳体(a)上设置相配合的转轴(1b1)与轴孔,所述转轴(1b1)的轴心位于支座(1a)外侧,所述支座(1a)被限制为在受挤碰时以转轴(1b1)为中心沿第一方向偏转,并在此过程中致使所述复位部件产生弹性形变,所述复位部件被配置为在挤碰作用力撤销后带动支座(1a)与连接臂(1b)复位。
8.如权利要求5所述边界检测模组,其特征在于:所述第一检测部件(1)还包括滑轨及复位部件,所述滑轨固定连接于壳体(a),所述第一方向与滑轨的延伸方向一致,所述支座(1a)活动连接于滑轨,所述复位部件连接支座(1a),所述支座(1a)被限制为在其受挤碰时沿滑轨移动,并在此过程中致使所述复位部件产生弹性形变,所述复位部件被配置为在挤碰作用力撤销后带动支座(1a)复位。
9.如权利要求5-8中任意一项所述边界检测模组,其特征在于:所述第一检测部件(1)还包括环套在支座(1a)外部的滚轮(1c),所述滚轮(1c)与支座(1a)连接且轴向开设通孔,所述第二检测部件(2)的底端从通孔中穿出。
技术总结
边界检测模组,包括第一检测部件、第二检测部件、触发部件与感应器,第一检测部件被配置为当其与板件的边框发生挤碰时相对于壳体沿第一方向移动,第二检测部件活动安装在第一检测部件上并被配置为当其移动至板件边缘外侧时相对于第一检测部件沿不同于第一方向的第二方向移动,触发部件设置在第二检测部件上且处于第一位置,感应器被配置为当第一检测部件沿第一方向移动并带动触发部件从第一位置移动至第二位置或者第二检测部件沿第二方向移动并带动触发部件从第一位置移动至第三位置时产生感应信号。上述边界检测模组仅采用一个感应器与一个触发部件即可实现边界检测,具有结构简单、稳定可靠的优点。
技术研发人员:罗积川,彭象连,高雄伟
受保护的技术使用者:衡阳慧迪智能科技有限公司
技术研发日:20230801
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!