一种仿生壁虎高楼玻璃清洗机器人的制作方法
本技术涉及清洁,尤其涉及一种仿生壁虎高楼玻璃清洗机器人。
背景技术:
1、高楼大厦我们随处可见,外表都特别的漂亮但是高楼大厦长时间不清洗,玻璃幕墙上非常容易积累灰尘、污垢、甚至严重的还会有鸟屎残留等。
2、目前都是采用人工清洁的方式,作业人员携带好清洁工具,然后上到吊篮上,沿着高楼从上往下的对玻璃进行擦洗。
3、但是采用人工对高楼玻璃进行清洗,由于是高空作业,比较危险,稍不注意就会发生严重的安全事故。
技术实现思路
1、本实用新型的目的在于提供一种仿生壁虎高楼玻璃清洗机器人,旨在解决目前采用人工清洗高楼玻璃比较危险的问题。
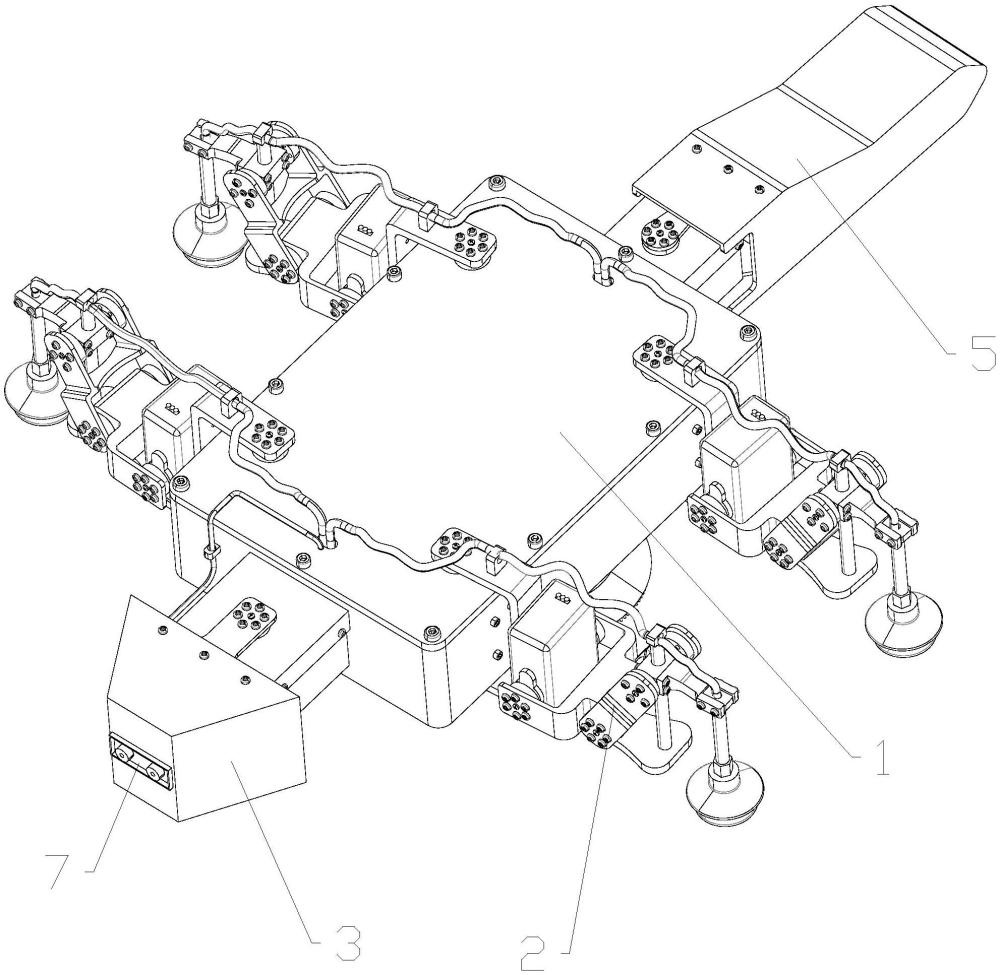
2、为实现上述目的,本实用新型提供了一种仿生壁虎高楼玻璃清洗机器人,包括主体、四个吸盘移动组件、头部喷水组件、腹部刷洗组件、尾部刮净组件、主控组件和双目相机;
3、四个所述吸盘移动组件分别设置在所述主体侧边;所述头部喷水组件设置在所述主体一侧;所述腹部刷洗组件设置在所述主体底部;所述尾部刮净组件设置在所述主体远离所述头部喷水组件一侧;所述主控组件设置在所述主体内部;所述双目相机固定设置在所述头部喷水组件一侧。
4、其中,所述吸盘移动组件包括第一双轴舵机、第一支架、第二双轴舵机、第二支架、固定底座、导杆、滑块、连杆、气杆、吸盘、真空泵、电磁气阀和气管;所述第一双轴舵机固定设置在所述主体内部;所述第一支架分别与所述第一双轴舵机的两个输出端固定连接,并位于所述主体侧边;所述第二双轴舵机固定设置在所述第一支架侧边;所述第二支架分别与所述第二双轴舵机的两个输出端固定连接,并位于所述第二双轴舵机侧边;所述固定底座与所述第一支架固定连接,并位于所述第一支架一侧;所述导杆与所述固定底座固定连接,并位于所述固定底座顶部;所述滑块与所述导杆滑动连接,并套设于所述导杆上;所述连杆与所述第二支架转动连接,并与所述滑块转动连接,且位于所述第二支架一侧;所述气杆与所述滑块固定连接,并位于所述滑块一侧;所述吸盘与所述气杆连通,并位于所述气杆底部;所述真空泵固定设置在所述主体内部;所述电磁气阀与所述真空泵连通,并与所述主体固定连接,且位于所述主体内部;所述气管与所述电磁气阀连通,并与所述气杆连通,且穿过所述主体。
5、其中,所述头部喷水组件包括头部安装盒、头部双轴舵机、头部支架、头部壳体、暂存水箱、多个喷管、蓄水箱、水泵、电磁水阀和水管;所述头部安装盒与所述主体固定连接,并位于所述主体一侧;所述头部双轴舵机固定设置在所述头部安装盒内部;所述头部支架分别与所述头部双轴舵机的两个输出端固定连接,并位于所述头部安装盒一侧;所述头部壳体与所述头部支架固定连接,并位于所述头部支架一侧;所述暂存水箱固定设置在所述头部壳体内部;多个所述喷管分别与所述暂存水箱连通,并分别穿过所述头部壳体;所述蓄水箱固定设置在所述主体内部;所述水泵与所述蓄水箱连通,并位于所述蓄水箱顶部;所述电磁水阀与所述水泵连通,并与所述蓄水箱固定连接,且位于所述蓄水箱顶部;所述水管与所述电磁水阀连通,并与所述暂存水箱连通,且穿过所述主体。
6、其中,所述腹部刷洗组件包括腹部安装盒、两个转轴、两个毛刷、电机、主动齿轮、两个安装轴、两个从动齿轮、两个第一杆、两个第二杆和两个第三杆;所述腹部安装盒与所述主体固定连接,并位于所述主体内部;两个所述转轴分别与所述腹部安装盒转动连接,分别与所述主体转动连接,且分别穿过所述主体;两个所述毛刷分别与两个所述转轴固定连接,并分别位于所述主体底部;所述电机与所述腹部安装盒固定连接,并位于所述腹部安装盒顶部;所述主动齿轮与所述电机的输出端固定连接,并位于所述腹部安装盒内部;两个所述安装轴分别与所述腹部安装盒转动连接,并分别位于所述腹部安装盒内部;两个所述从动齿轮分别与两个所述安装轴固定连接,并分别与所述主动齿轮啮合;两个所述第一杆分别与两个所述安装轴固定连接,并分别位于两个所述安装轴顶部;两个所述第二杆分别两个所述转轴固定连接,并分别位于两个所述转轴顶部;两个所述第三杆分别与两个所述第一杆转动连接,并分别与两个所述第二杆转动连接,且分别位于所述腹部安装盒内部。
7、其中,所述尾部刮净组件包括尾部安装盒、尾部双轴舵机、尾部支架、尾部壳体和两个刮刀;所述尾部安装盒与所述主体固定连接,并位于所述主体一侧;所述尾部双轴舵机固定设置在所述尾部安装盒内部;所述尾部支架分别与所述尾部双轴舵机的两个输出端固定连接,并位于所述尾部安装盒一侧;所述尾部壳体与所述尾部支架固定连接,并位于所述尾部支架一侧;两个所述刮刀分别与所述尾部壳体固定连接,并分别位于所述尾部壳体底部。
8、其中,所述主控组件包括第一主控盒、树莓派、第二主控盒、电机驱动板和单片机;所述第一主控盒与所述腹部安装盒固定连接,并位于所述主体内部;所述树莓派设置在所述第一主控盒内部;所述第二主控盒与所述主体固定连接,并位于所述主体内部;所述电机驱动板设置在所述第二主控盒内部;所述单片机设置在所述第二主控盒内部。
9、本实用新型的一种仿生壁虎高楼玻璃清洗机器人,所述吸盘移动组件可以吸在玻璃上,四个所述吸盘移动组件带动所述主体在玻璃上移动,所述头部喷水组件可以喷出清洗剂,所述腹部刷洗组件可以对喷上清洗剂的玻璃进行刷洗,所述尾部刮净组件可以将水渍刮干净,所述双目相机用于结合机器视觉算法,所述主控组件用于控制整体完成自主行走;在使用时,通过四个所述吸盘移动组件在玻璃上持续行走,所述头部喷水组件喷出清洗剂,然后所述腹部刷洗组件对玻璃刷洗,最后所述尾部刮净组件将水渍刮干净,代替人工清洗,解决目前采用人工清洗高楼玻璃比较危险的问题。
技术特征:
1.一种仿生壁虎高楼玻璃清洗机器人,其特征在于,
2.如权利要求1所述的一种仿生壁虎高楼玻璃清洗机器人,其特征在于,
3.如权利要求2所述的一种仿生壁虎高楼玻璃清洗机器人,其特征在于,
4.如权利要求3所述的一种仿生壁虎高楼玻璃清洗机器人,其特征在于,
5.如权利要求4所述的一种仿生壁虎高楼玻璃清洗机器人,其特征在于,
6.如权利要求5所述的一种仿生壁虎高楼玻璃清洗机器人,其特征在于,
技术总结
本技术涉及清洁技术领域,具体涉及一种仿生壁虎高楼玻璃清洗机器人,包括主体、四个吸盘移动组件、头部喷水组件、腹部刷洗组件、尾部刮净组件、主控组件和双目相机;吸盘移动组件可以吸在玻璃上,四个吸盘移动组件带动主体在玻璃上移动,头部喷水组件可以喷出清洗剂,腹部刷洗组件可以对喷上清洗剂的玻璃进行刷洗,尾部刮净组件可以将水渍刮干净,双目相机用于结合机器视觉算法,主控组件用于控制整体完成自主行走;在使用时,通过四个吸盘移动组件在玻璃上持续行走,头部喷水组件喷出清洗剂,然后腹部刷洗组件对玻璃刷洗,最后尾部刮净组件将水渍刮干净,代替人工清洗,解决目前采用人工清洗高楼玻璃比较危险的问题。
技术研发人员:李根,朱长双,黎泽伦
受保护的技术使用者:苏州讯动气体科技有限公司
技术研发日:20230808
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!