一种用于扫地机器人的方形轨迹导向组件的制作方法
本发明属于智能家电设备,具体涉及一种用于扫地机器人的方形轨迹导向组件。
背景技术:
1、随着科技的进步与人民生活水平的日益提高,智能家电开始走入千家万户,以其使用方便、操控灵活等特点成为人们日常生活中的新宠。上述的扫地机器人又可被称为自动打扫机、智能吸尘器、机器人吸尘器等,扫地机器人作为智能家电的一种,其能凭借人工智能自动在房间内完成地板清理工作;现有的扫地机器人的机身为无线机器,一般以圆盘形为主,同时在扫地机器人清扫的过程中,扫地机器人的边刷或者抹布能够对地面进行清扫,并能够将灰尘扫至机器人吸尘口处进入自身的垃圾收纳盒,从而完成地面清理的功能。然而,由于现有的扫地机器人多为圆盘形构造,边刷以及抹布也为圆形,其转动的轨迹也为圆形,在工作过程中边刷或者抹布也按圆形路线运动,并且在扫地机器人的运动过程中,扫地机器人的清扫覆盖范围为多个圆形的叠加,因而在清扫覆盖范围的边缘处即相邻两个圆形范围的拼合处存在空隙,从而导致整体清扫效率以及清扫效果无法得到保障;更重要的是,当在进行相应的墙边墙角处的灰尘难以打扫,就会存在打扫死角,从而使地面不能被完全打扫清洁,因此导致在清扫墙角或角落时,不能将积纳污垢的墙边墙角清扫干净,反而会将清扫过程中的一些垃圾扫拨至角落中,需要人工进行二次清理,为生活造成不便,造成用户使用体验不佳;此外,也有一些改进的现有清洁设备,其擦地刷能够进行角落的清洁,但其擦地刷在地面的清洁轨迹也不是严格的方形,也存在着角落清洁不彻底的问题。
2、鉴于上述已有技术,本申请人对扫地机器人的导向组件做了有益的设计以解决上述清扫效率不佳以及无法对墙边墙角等部位进行高效清理的问题,下面将要介绍的技术方案便是在这种背景下产生的。
技术实现思路
1、本发明的目的是要提供一种结构简单、运行可靠的用于扫地机器人的方形轨迹导向组件,有助于通过改进结构并采用勒洛三角形式的滑块实现方形轨迹移动由此有效地提升清扫效率以及清扫效果,有利于实现对于房间墙壁底部边沿以及墙角进行高效清理工作从而不仅能够提高清扫效果也可以提升用户使用体验。
2、本发明的任务是这样来完成的,一种用于扫地机器人的方形轨迹导向组件,包括:一驱动电机;一连接传动板,该连接传动板连接于所述驱动电机的传动轴的底部;一滑块,所述滑块呈勒洛三角形形状构造,且该滑块安装于所述连接传动板的下方,该滑块能够在连接传动板的带动下往复转动;一内导向框架,该内导向框架呈正方形框架结构,所述滑块滑动配合安装在该内导向框架之中并能够在其中实现自转;一方形抹布,该方形抹布连接在所述内导向框架的底部,且该方形抹布的形状大小与内导向框架的形状大小相对应,且该方形抹布用于洁净地面;一中导向框架,该中导向框架套装在所述内导向框架上,而所述内导向框架滑动配合安装在该中导向框架之中并能够在该中导向框架内往复运动;一外固定框架,该外固定框架呈正方形框架结构并套装在所述中导向框架上,且所述中导向框架滑动配合安装在该外固定框架之中并能够在该中导向框架内往复运动;在所述滑块的转动过程中,滑块能够带动内导向框架以及中导向框架在所述外固定框架之中往复运动,并使得内导向框架以及方形抹布按正方形路线运动。
3、在本发明的一个具体的实施例中,在所述内导向框架的内周侧表面上开设有沿其周向设置的内导向框架轨道槽,而所述滑块的三个顶端拐角部位配设在内导向框架轨道槽之中并与所述内导向框架形成转动副,且滑块的三个顶端拐角部位能够在内导向框架轨道槽内往复滑动同时带动内导向框架运动。
4、在本发明的另一个具体的实施例中,所述中导向框架呈长方形框架结构,且在该中导向框架的并行于长度方向的两侧框边板的内侧壁上均开设有中导向框架轨道槽,在所述内导向框架的两侧对应的框边板的外侧壁上相对应地凸设形成有内导向框架滑动条,所述内导向框架滑动条的形状与中导向框架轨道槽的形状相适配并滑动配合安装在该中导向框架轨道槽之中,从而使得内导向框架能够在中导向框架中往复滑动。
5、在本发明的又一个具体的实施例中,在所述中导向框架的并行于宽度方向的两侧框边板的外侧壁上均凸设形成有中导向框架滑动条,而在所述外固定框架的两个相对的框边板的内侧壁上则均开设有外固定框架轨道槽,所述外固定框架轨道槽的形状与中导向框架滑动条的形状相适配,且两条所述中导向框架滑动条滑动配合安装在各自所对应的外固定框架轨道槽之中,从而使得中导向框架能够在外固定框架中往复滑动。
6、在本发明的再一个具体的实施例中,所述中导向框架底部覆盖面积为所述内导向框架底部覆盖面积的二倍。
7、在本发明的还有一个具体的实施例中,所述外固定框架底部覆盖面积为所述中导向框架底部覆盖面积的二倍,且该外固定框架底部覆盖面积为所述内导向框架底部覆盖面积的四倍,且该正方形形状的内导向框架为正方形形状的外固定框架形状大小的四分之一。
8、在本发明的进而一个具体的实施例中,在所述连接传动板上还配设有一滑块联动杆,且该滑块联动杆从连接传动板本体朝向下延伸设置,而在所述滑块上则开设有一贯穿其厚度方向的滑块连接孔,所述滑块联动杆配合安装在该滑块连接孔之中,从而实现连接传动板与滑块的定位连接。
9、在本发明的更而一个具体的实施例中,所述滑块联动杆相对于所述连接传动板的中心轴线呈偏心设置,且滑块联动杆插配在滑块的中心位置处。
10、在本发明的更进而一个具体的实施例中,所述驱动电机为线性电机。
11、本发明采用上述结构后,具有的有益效果:首先,本方形轨迹导向组件能够安装在扫地机器人的下方并作为擦地运动组件使用,由于采用了勒洛三角形式的滑块,内导向框架以及中导向框架在所述外固定框架之中往复运动,并使得内导向框架以及方形抹布按正方形路线运动,同时在一个工作过程中,内导向框架以及方形抹布的移动轨迹的覆盖面积为外固定框架的方形面积,相较于现有扫地机器人圆形擦地组件只能够按照圆形为运动轨迹的清洗路线,本技术方案能够实现严格的方形直线式运动轨迹,相较于圆形擦地组件能够填补其运行轨迹中的边缘空缺处,从而在相同工作时间内增加擦地面积,或者说提高同样清洁面积的清扫效率,能够有效提升扫地机器人的清扫效率与清扫效果,具有显著的推广意义;其次,由于能够实现内导向框架与方形抹布的方形移动轨迹,通过利用扫地机器人本身的定位装置将扫地机器人放置在紧贴墙体的位置后,通过扫地机器人自身的运动轨道控制,方形轨迹导向组件中的方向抹布能够将墙边以及墙角进行高效清理工作,提高清扫效果的同时也能够提升用户使用扫地机器人的使用体验,极大拓宽了扫地机器人的使用场景。
技术特征:
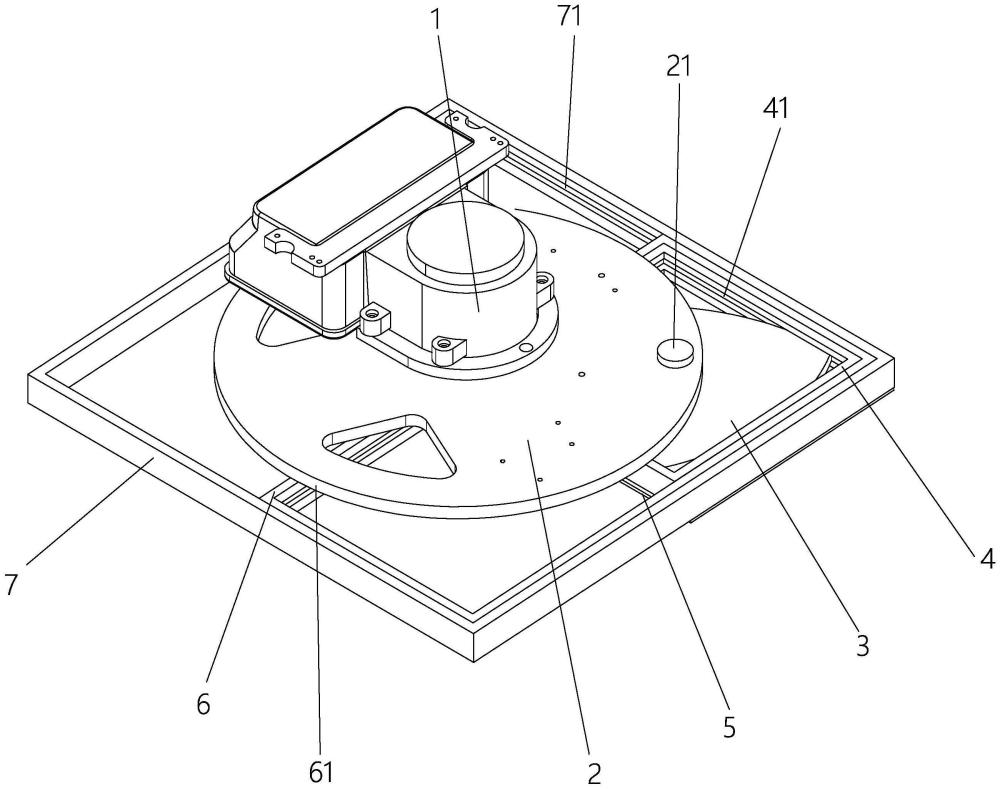
1.一种用于扫地机器人的方形轨迹导向组件,其特征在于,包括:一驱动电机(1);连接传动板(2),该连接传动板(2)连接于所述驱动电机(1)的传动轴的底部;一滑块(3),所述滑块(3)呈勒洛三角形形状构造,且该滑块(3)安装于所述连接传动板(2)的下方,该滑块(3)能够在连接传动板(2)的带动下往复转动;内导向框架(4),所述内导向框架(4)呈正方形框架结构,所述滑块(3)滑动配合安装在该内导向框架(4)之中并能够在其中实现自转;一方形抹布(5),该方形抹布(5)连接在所述内导向框架(4)的底部,且该方形抹布(5)的形状大小与内导向框架(4)的形状大小相适配,该方形抹布(5)用于洁净地面;一中导向框架(6),该中导向框架(6)套装在所述内导向框架(4)上,而所述内导向框架(4)滑动配合安装在该中导向框架(6)之中并能够在该中导向框架(6)内往复运动;一外固定框架(7),该外固定框架(7)呈正方形框架结构并套装在所述中导向框架(6)上,且所述中导向框架(6)滑动配合安装在该外固定框架(7)之中并能够在该中导向框架(7)内往复运动;在所述滑块(3)的转动过程中,滑块(3)能够带动内导向框架(4)以及中导向框架(6)在所述外固定框架(7)之中往复运动,并使得内导向框架(4)以及方形抹布(5)按正方形路线运动。
2.根据权利要求1所述的一种用于扫地机器人的方形轨迹导向组件,其特征在于:在所述内导向框架(4)的内周侧表面上开设有沿其周向设置的内导向框架轨道槽(41),而所述滑块(3)的三个顶端拐角部位配设在内导向框架轨道槽(41)之中并与所述内导向框架(4)形成转动副,且滑块(3)的三个顶端拐角部位能够在内导向框架轨道槽(41)内往复滑动同时带动内导向框架(4)运动。
3.根据权利要求1所述的一种用于扫地机器人的方形轨迹导向组件,其特征在于:所述中导向框架(6)呈长方形框架结构,且在该中导向框架(6)的并行于长度方向的两侧框边板的内侧壁上均开设有中导向框架轨道槽(61),在所述内导向框架(4)的两侧对应的框边板的外侧壁上相对应地凸设形成有内导向框架滑动条(42),所述内导向框架滑动条(42)的形状与中导向框架轨道槽(61)的形状相适配并滑动配合安装在该中导向框架轨道槽(61)之中,从而使得内导向框架(4)能够在中导向框架(6)中往复滑动。
4.根据权利要求3所述的一种用于扫地机器人的方形轨迹导向组件,其特征在于:在所述中导向框架(6)的并行于宽度方向的两侧框边板的外侧壁上均凸设形成有中导向框架滑动条(62),而在所述外固定框架(7)的两个相对的框边板的内侧壁上则均开设有外固定框架轨道槽(71),所述外固定框架轨道槽(71)的形状与中导向框架滑动条(62)的形状相适配,且两条所述中导向框架滑动条(62)滑动配合安装在各自所对应的外固定框架轨道槽(71)之中,从而使得中导向框架(6)能够在外固定框架(7)中往复滑动。
5.根据权利要求1所述的一种用于扫地机器人的方形轨迹导向组件,其特征在于:所述中导向框架(6)底部覆盖面积为所述内导向框架(4)底部覆盖面积的二倍。
6.根据权利要求5所述的一种用于扫地机器人的方形轨迹导向组件,其特征在于:所述外固定框架(7)底部覆盖面积为所述中导向框架(6)底部覆盖面积的二倍,且该外固定框架(7)底部覆盖面积为所述内导向框架(4)底部覆盖面积的四倍。
7.根据权利要求1所述的一种用于扫地机器人的方形轨迹导向组件,其特征在于:在所述连接传动板(2)上还配设有一滑块联动杆(21),且该滑块联动杆(21)从连接传动板(2)本体上朝向下延伸设置,而在所述滑块(3)上则开设有一贯穿其厚度方向的滑块连接孔(31),所述滑块联动杆(21)配合安装在该滑块连接孔(31)之中,从而实现连接传动板(2)与滑块(3)的定位连接。
8.根据权利要求7所述的一种用于扫地机器人的方形轨迹导向组件,其特征在于:所述滑块联动杆(21)相对于所述连接传动板(2)的中心轴线呈偏心设置,且滑块联动杆(21)插配在滑块(3)的中心位置处。
9.根据权利要求1所述的一种用于扫地机器人的方形轨迹导向组件,其特征在于:所述驱动电机(1)为线性电机。
技术总结
一种用于扫地机器人的方形轨迹导向组件,属于智能家电设备技术领域。包括:驱动电机;连接传动板,连接于驱动电机的传动轴的底部;滑块,呈勒洛三角形形状构造并安装于连接传动板的下方;内导向框架,呈正方形框架结构,滑块滑动配合安装在该内导向框架之中;方形抹布,固定在内导向框架的底部;中导向框架,套装在内导向框架上,内导向框架滑动配合安装在该中导向框架之中;外固定框架,呈正方形框架结构并套装在中导向框架上,中导向框架滑动配合安装在该外固定框架之中。优点:实现内导向框架与方形抹布以正方形为轨迹进行清扫工作,提升扫地机器人的清扫效率与清扫效果;满足房间内部墙边以及墙角的清扫需求,提升用户使用体验。
技术研发人员:夏益杨,丁建达,奚建飞
受保护的技术使用者:苏州恒瑞达家用地垫有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!