在连续导通模式中优化的开关磁阻相电流控制的制作方法
1.本公开大体上涉及用于开关磁阻马达的控制,且更具体地说,涉及开关磁阻马达控制系统以在开关磁阻马达的连续导通模式中提供优化的开关磁阻相电流控制。
背景技术:
2.机器可以包括联接到动力源(例如内燃机或电动马达)的变速箱,以使得机器能够被重新定位和/或在位置之间行进。随着人们对节能和避免使用化石燃料的兴趣增加,电动马达的使用正变得越来越普遍。电动马达可以用于将电能转换成机械功率以驱动机器。例如,电动马达可以用于车辆、挖掘装载机、冷刨机、轮式装载机、压实机、伐木归堆机、林业机械、集运机、收割机、挖掘机、工业装载机、转向臂装载机、物料搬运机、平地机、管道铺设机、道路取料机、滑移装载机、集材机、伸缩臂叉装机、拖拉机、推土机、拖拉机刮板或其它设备中。
3.或者,一些机器可以包括电动马达和内燃机两者。例如,诸如拖拉机的机器的电传动系可以包括内燃机、联接到内燃机的发电机、直流(dc)电源和马达。在这种情况下,内燃机可以用于重新定位机器,并且发电机、dc电源和马达可以用于驱动机器的一个或多个器具。
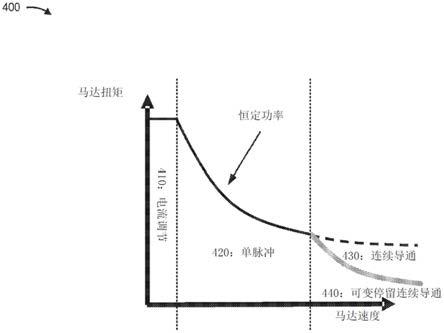
4.马达可以是开关磁阻(sr)马达。可以基于开关磁阻马达的操作模式来控制提供到开关磁阻马达的电流的量。例如,控制器可以实施电流调节操作模式,例如对于需要更大量的马达扭矩(例如,大于阈值马达扭矩值)的较低速度(例如,小于阈值速度)任务。在电流调节操作模式中,控制器可以限制电流,结合来自开关磁阻马达的反电动势的量,由此导致在增大的马达速度下实现恒定的马达扭矩。
5.相比之下,相对于电流调节模式,对于需要更大量功率输出的较高速度任务,控制器可以实施单脉冲操作模式。在单脉冲操作模式中,控制器可以依序推进提供到开关磁阻马达的电流的相位,以在增大马达速度和减小马达扭矩水平的同时维持恒定功率。
6.此外,控制器可以实施连续导通操作模式,所述连续导通操作模式可以由固定停留定义。固定停留,有时称为静态停留,可以表示在其间将电压施加到开关磁阻马达的每个相的导通窗口,并且可以对应于施加电压时的接通角(theta on angle)与不施加电压时的断开角(theta off angle)之间的差值。接通角和断开角可以表示马达的开关磁阻转子相对于开关磁阻马达的定子的位置。停留可以固定在大于180度(例如,181度、182度、185度等)的角度,从而针对固定dc电压提供瞬态过扭矩。通过这种方式,控制器可以使得增大的马达功率能够在减小的马达扭矩水平下相对于单脉冲模式实现增大的马达速度。然而,在单脉冲操作模式与具有固定停留的连续导通操作模式之间转换可能导致在一些负载条件下马达扭矩的硬转换。
7.在samsung electro
‑
mechanics co.,ltd.于2013年12月26日提交的美国专利申请公开序列号2014/0184131(
“‘
131专利公开”)中公开了改进马达控制器的一种尝试。具体来说,
‘
131专利公开公开了一种控制开关磁阻马达的方法。在
‘
131专利公开中公开的方法
包括感测开关磁阻马达的负载的变化,以及控制开关磁阻马达的停留角和脉冲宽度调制占空比。
8.然而,控制开关磁阻马达的停留角和脉冲宽度调制占空比不能在不同马达速度、马达扭矩、功率等之下对开关磁阻马达实现优化控制。本公开的用于操作模式选择的开关磁阻马达控制系统解决了上文阐述的一个或多个问题和/或现有技术中的其他问题。
技术实现要素:
9.根据一些实施方式,本公开涉及一种方法。所述方法可以包括由控制器基于马达速度、马达瞬态速度或马达功率命令值中的至少一个来选择操作模式。可以从包括单脉冲模式、连续导通模式和可变停留连续导通模式的一组操作模式中选择所述操作模式。所述方法可以包括由处理器使用所述操作模式来控制开关磁阻马达。
10.根据一些实施方式,本公开涉及一种开关磁阻马达控制系统。所述开关磁阻马达控制系统可以包括存储器和处理器。所述处理器可以被配置成确定从单脉冲操作模式转换到连续导通操作模式。所述处理器可以被配置成基于确定转换到连续导通操作模式,选择可变停留连续导通操作模式或固定导通角度连续导通操作模式。所述处理器可以被配置成使用可变停留连续导通操作模式或固定导通角度连续导通操作模式来控制开关磁阻马达。
11.根据一些实施方式,本公开涉及一种机器。所述机器可以包括马达,联接到马达的逆变器,以及处理器。所述处理器可以被配置成基于马达速度、马达瞬态速度或马达功率命令值中的至少一个来选择多个操作模式中的操作模式,以用于控制由逆变器提供到马达的电流。多个操作模式中的第一操作模式可以与第一固定电流值以及第一固定导通角度和小于或等于阈值的马达速度相关联。多个操作模式中的第二操作模式可以与第二固定电流值以及可变导通角度和大于阈值的马达速度相关联。多个操作模式中的第三操作模式可以与可变电流值以及第二固定导通角度和大于阈值的马达速度相关联。处理器可以被配置成使用所选择的操作模式控制马达。
附图说明
12.图1是包括开关磁阻马达控制系统的示例性机器的图。
13.图2是可以与图1的机器一起使用的示例性开关磁阻马达控制系统的图。
14.图3是用于确定开关磁阻马达的操作模式的示例性过程的流程图。
15.图4是与图3中所示的示例性过程有关的马达条件的图。
16.图5是用于确定开关磁阻马达的操作模式的示例性过程的流程图。
具体实施方式
17.本公开涉及一种用于为开关磁阻马达执行操作模式选择的开关磁阻马达控制系统。开关磁阻马达控制系统对利用这种开关磁阻马达控制系统的任何机器具有通用适用性。术语“机器”可以指执行与诸如采矿、建筑、农业、运输或任何其它行业之类的行业相关联的操作的任何机器。作为一些示例,所述机器可以是车辆、挖掘装载机、冷刨机、轮式装载机、压实机、伐木归堆机、林业机械、集运机、收割机、挖掘机、工业装载机、转向臂装载机、物料搬运机、平地机、管道铺设机、道路取料机、滑移装载机、集材机、伸缩臂叉装机、拖拉机、
推土机、拖拉机刮板等。此外,一个或多个器具可以连接到机器并使用与本文所述的开关磁阻马达控制系统相关联的电动马达来控制。
18.图1是包括开关磁阻马达控制系统的示例性机器100的图。机器100被示为履带式拖拉机,但可以包括任何类型的包括能够控制机器100的电动马达(例如,开关磁阻马达)的开关磁阻马达控制系统的机器。
19.如图所示,机器100可以具有动力源102、电驱动系统104、牵引系统106、逆变器108、马达110和驱动轴112。动力源102被配置成向机器100供应动力。在一些实施方式中,动力源102可以是直流(dc)电源。动力源102可以可操作地布置成从操作台116中的操作员控制器114接收控制信号。另外,动力源102可以与电驱动系统104和/或器具118一起被可操作地布置,以根据从操作员控制器114接收的控制信号选择性地操作电驱动系统104和/或器具118。动力源102可以经由例如电驱动系统104、逆变器108、马达110、驱动轴112等提供操作动力,用于推进电驱动系统104和/或操作器具118。
20.电驱动系统104可以与动力源102一起被可操作地布置以经由来自操作员控制器114的控制信号选择性地推进机器100。电驱动系统104可以可操作地连接到多个地面接合构件,例如如图所示的牵引系统106,所述地面接合构件可以通过轴、驱动轴、变速箱和/或其它部件可移动地连接到机器100,并且可以通过马达110和驱动轴112可移动地连接到电驱动系统104。在一些实施方式中,牵引系统106可以采用履带驱动系统、轮驱动系统或被配置成推进机器100的任何其他类型的驱动系统的形式而被提供。在一些实施方式中,电驱动系统104可以与动力源102一起被可操作地布置以选择性地操作器具118,所述器具可以可移动地连接到机器100和电驱动系统104。
21.逆变器108可以电连接到动力源102和/或电驱动系统104。在一些实施方式中,逆变器108可以从动力源102接收dc电流,并且可以控制dc电流的相位以将ac电流提供到马达110,所述马达可以是开关磁阻(sr)马达。附加地或替代地,逆变器108可以将ac电流提供至发电机。通过这种方式,逆变器108可以提供操作动力,用于推进机器100和/或操作器具118。逆变器108和/或马达110可以从开关磁阻马达控制系统接收控制信号以控制马达110的操作模式;以控制提供到马达110的电流、电压、马达扭矩等;以控制提供到马达110的电流的相位;等等。
22.马达110可以电耦接到传感器120,所述传感器可以向开关磁阻马达控制系统200提供反馈,以实现对逆变器108、马达110等的控制。例如,传感器120可以是电流传感器、马达速度传感器、马达扭矩传感器等,其向开关磁阻马达控制系统200提供反馈信息,以使得开关磁阻马达控制系统200能够选择马达110的操作模式并结合操作模式来控制逆变器108和马达110。马达110可以包括转子122和定子124。转子122和/或定子124可以电耦接到传感器120,所述传感器可以提供标识转子122相对于定子124的位置的反馈信息,以实现对马达110的控制。
23.器具118可以与电驱动系统104一起被可操作地布置,使得器具118可以通过从操作员控制器114传输到电驱动系统104、逆变器108、马达110、驱动轴112等的控制信号选择性地移动。所示器具118是拖拉机装载机。其它实施例可以包括用于各种任务的任何其它合适的器具,例如,如推土、平整、刷洗、压实、平路、提升、疏土、翻土等。示例性器具包括推土机、螺旋钻、桶、破碎机/锤、刷子、压实机、切割机、叉状提升装置、平地机刀头和末端刀头、
抓斗机等。
24.如上所述,提供图1作为示例。其它示例是可能的,且可以与结合图1所描述的示例不同。
25.图2是可以与开关磁阻马达控制系统200交互的示例性开关磁阻马达控制系统200和关联部件的图。
26.开关磁阻马达控制系统200包括一个或多个处理器202。处理器202实现于硬件、固件或硬件和软件的组合中。处理器202为中央处理单元(cpu)、图形处理单元(gpu)、加速处理单元(apu)、微处理器、微控制器、数字信号处理器(dsp)、现场可编程门阵列(fpga)、专用集成电路(asic),或另一类型的处理部件。在一些实施方式中,处理器202包括能够被编程以执行功能的一个或多个处理器。存储器204包括存储供处理器202使用的信息和/或指令的随机存取存储器(ram)、只读存储器(rom)和/或另一类型的动态或静态存储装置(例如,闪存、磁存储器和/或光存储器)。
27.在一些实施方式中,开关磁阻马达控制系统200可以是机器100和/或马达110的电子控制单元(ecu)、电子控制模块(ecm)、控制器等。处理器202可以执行一个或多个指令和/或命令以控制机器100的一个或多个部件,例如控制逆变器108、马达110等的操作。存储器204可以存储程序代码,以用于由处理器202执行和/或用于存储与由处理器202执行此类程序代码相关的数据。
28.开关磁阻马达控制系统200可以从机器100的各个部件接收一个或多个输入信号,可以对一个或多个输入信号进行操作(例如,通过使用输入信号作为程序的输入而执行程序)以生成一个或多个输出信号,并且可以将一个或多个输出信号输出到机器100的各个部件。例如,开关磁阻马达控制系统200可以(例如,经由有线或无线连接)电子连接到一个或多个传感器206(例如,其可以对应于传感器120)、马达110等,并且可以从传感器206和/或马达110接收输入。在一些实施方式中,开关磁阻马达控制系统200可以确定从单脉冲操作模式转变到连续导通操作模式。在这种情况下,开关磁阻马达控制系统200可以选择可变停留连续导通操作模式或固定停留连续导通操作模式,并且使用可变停留连续导通操作模式或固定停留连续导通操作模式来控制开关磁阻马达。
29.传感器206包括一组提供关于机器100的状态的信息的传感器装置。例如,传感器206可以包括电流传感器、磁通量传感器、马达速度传感器(例如,用于确定转子122的速度的传感器)、马达扭矩传感器、马达瞬态速度传感器、马达功率传感器、位置传感器(例如,用于确定转子122相对于定子124的位置的传感器)等等。例如,第一传感器206可以提供标识马达速度的信息,并且第二传感器206可以提供标识马达瞬态速度的信息,并且开关磁阻马达控制系统200可以确定马达110的操作模式。在这种情况下,基于操作模式,开关磁阻马达控制系统200可以基于马达速度和马达瞬态速度控制马达110。
30.作为示例提供了图2中所示的部件的数量和布置。实际上,与图2所示的部件相比,可能存在额外的部件、更少的部件、部件或不同布置的部件。此外,可以在单个部件内实现图2中所示的两个或更多个部件,或者可以将图2中所示的单个部件实现为多个、分离的和/或分布式的部件。附加地或替代地,一组部件(例如,一个或多个部件)可以执行被描述为由另一组部件执行的一个或多个功能。
31.图3是用于控制开关磁阻马达的示例性过程300的流程图。在一些实施方式中,过
程300可以由开关磁阻马达控制系统200执行。图4是开关磁阻马达的控制的示例400的图。
32.如图3中所示,过程300可以包括确定马达速度是否大于阈值速度(框305)。例如,开关磁阻马达控制系统200可以确定马达速度是否大于阈值速度。在一些实施方式中,开关磁阻马达控制系统200可以基于来自耦接到马达110的传感器206的反馈来确定马达速度。例如,开关磁阻马达控制系统200可以接收标识马达速度的反馈,并且可以确定马达速度是否大于与使用电流调节操作模式相关联的阈值速度。通过这种方式,在小于或等于阈值速度的情况下,开关磁阻马达控制系统200可以在低(例如,小于或等于阈值)马达速度下实现高(例如,大于阈值)水平的马达扭矩。
33.如图3中所示,基于马达速度不大于阈值速度(框305
‑
否),过程300可以包括在电流调节操作模式中控制马达(框310)。例如,基于马达速度不大于阈值速度,开关磁阻马达控制系统200可以在电流调节操作模式下控制马达110,如图4中由附图标记410所示。在这种情况下,可以结合与马达110相关联的反电动势(emf)来限制电流。在一些实施方式中,开关磁阻马达控制系统200可以在小于阈值速度的第一速度范围内控制提供给马达110的电流以调节与马达110相关联的温度。通过这种方式,开关磁阻马达控制系统200在第一速度范围内实现热管理。附加地或替代地,开关磁阻马达控制系统200可以在小于阈值速度的第二速度范围内控制马达110以优化(例如,以最小化)马达110的马达扭矩波动。
34.如图3中所示,基于马达速度大于阈值速度(框305
‑
是),过程300可以包括确定马达速度是否大于马达瞬态速度(框315)。例如,开关磁阻马达控制系统200可以确定马达速度是否大于马达瞬态速度。在一些实施方式中,开关磁阻马达控制系统200可以基于从传感器,例如传感器206接收的信息来确定马达速度和/或马达瞬态速度。
35.如图3中所示,基于马达速度不大于马达瞬态速度(框315
‑
否),过程300可以包括在单脉冲操作模式下控制马达(框320)。例如,开关磁阻马达控制系统200可以在单脉冲操作模式下控制马达110,如图4中由附图标记420所示。在这种情况下,相对于在电流调节操作模式下进行控制,开关磁阻马达控制系统200可以在增大的马达速度下以减小的马达扭矩维持恒定功率。在一些实施方式中,当在单脉冲操作模式下控制马达110时,开关磁阻马达控制系统200可以设置电流命令。例如,开关磁阻马达控制系统200可以将电流设置为马达110的峰值电流值。附加地或替代地,开关磁阻马达控制系统200可以将马达110的导通窗口的断开值和接通值设置为马达110的最大有效值,可以基于所存储的关于马达110配置的信息来确定最大有效值。
36.如图3中所示,基于马达速度大于马达瞬态速度(框315
‑
是),过程300可以包括确定功率命令是否小于最大功率命令(框325)。例如,开关磁阻马达控制系统200可以确定功率命令是否小于马达110的最大功率命令。在一些实施方式中,开关磁阻马达控制系统200可以基于存储的标识马达110的最大功率命令的信息确定最大功率命令。
37.如图3中所示,基于功率命令小于最大功率命令(框325
‑
是),过程300可以包括在连续导通操作模式下控制马达(框330)。例如,开关磁阻马达控制系统200可以在连续导通操作模式下以固定停留来控制马达110,如图4中由附图标记430所示。在一些实施方式中,开关磁阻马达控制系统200可以在连续导通操作模式中将停留设置成固定值。例如,基于马达110的配置,开关磁阻马达控制系统200可以设置断开值和接通值,使得停留是大于180度的值,例如181度、182度、185度等。尽管本文描述的实施方式是结合示例性停留值描述的,
但其它停留值也是可能的。
38.在一些实施方式中,开关磁阻马达控制系统200可以在连续导通操作模式下执行电流斩波。在一些实施方式中,开关磁阻马达控制系统200可以确定用于控制马达110的马达扭矩的电流命令。例如,基于查找表、存储的配置、基于插补程序确定的插补值等等,开关磁阻马达控制系统200可以确定可变功率命令,并且可以使用可变功率命令和固定停留来维持马达110的恒定功率。
39.如图3中所示,基于功率命令不小于最大功率命令(框325
‑
否),过程300可以包括在可变停留连续导通操作模式下控制马达(框335)。例如,开关磁阻马达控制系统200可以在可变停留连续导通操作模式下控制马达110,如图4中由附图标记440所示。在一些实施方式中,开关磁阻马达控制系统200可以为马达110使用固定电流命令。例如,开关磁阻马达控制系统200可以选择与在单脉冲操作模式中实现峰值电流相关联的电流命令。
40.在一些实施方式中,开关磁阻马达控制系统200可以确定用于可变停留连续导通操作模式的停留。例如,开关磁阻马达控制系统200可以将断开值设置为马达110的断开的最大有效值,并且可以基于马达110的马达扭矩来确定接通值。在这种情况下,开关磁阻马达控制系统200可以基于查找表、存储的值集合、基于插补程序确定的插补值等来确定接通值。通过这种方式,当从例如单脉冲操作模式切换到连续导通操作模式时,开关磁阻马达控制系统200实现扭矩命令的负载依赖性软转换,由此相对于与在所有马达扭矩负载条件下从单脉冲操作模式转换到固定停留连续导通操作模式相关联的硬转换,降低了损坏马达的可能性。
41.尽管图3示出了过程300的示例性框,但在一些实施方式中,过程300可以包括比图3中所描绘的那些框更多的框、更少的框、不同的框或不同布置的框。附加地或替代地,可以并行地执行过程300的框中的两个或更多个框。如上所述,提供图4作为示例。其它示例是可能的,且可以与结合图4所描述的示例不同。
42.图5是用于控制开关磁阻马达的示例性过程500的流程图。在一些实施方式中,过程500可以由开关磁阻马达控制系统200执行。
43.如图5中所示,过程500可以包括基于马达速度、马达瞬态速度或马达功率命令值中的至少一个来选择操作模式(框510)。例如,开关磁阻马达控制系统200(例如,使用处理器202和/或存储在存储器204中的一个或多个规则)可以基于马达速度、马达瞬态速度或马达功率命令值中的至少一个来选择操作模式。在一些实施方式中,从包括单脉冲模式、连续导通模式和可变停留连续导通模式的一组操作模式中选择操作模式。
44.如图5中进一步所示,过程500可以包括使用该操作模式来控制开关磁阻马达(框520)。例如,开关磁阻马达控制系统200(例如,使用处理器202和/或存储在存储器204中的一个或多个规则)可以通过控制器使用该操作模式控制开关磁阻马达。
45.过程500可以包括附加的实施方式,如下文中描述和/或结合本文别处所述的一个或多个其它过程描述的任何单个实施方式或实施方式的任何组合。
46.在一些实施方式中,过程500包括提供一组马达功率命令以控制开关磁阻马达的马达扭矩。在一些实施方式中,过程500包括确定马达瞬态速度大于马达速度,以及基于确定马达瞬态速度大于马达速度来选择单脉冲模式。在一些实施方式中,过程500包括确定马达速度大于或等于马达瞬态速度,确定马达功率命令值满足阈值,以及基于确定马达速度
大于或等于马达瞬态速度以及确定马达功率命令值满足阈值来选择具有静态导通角度值的连续导通模式。
47.在一些实施方式中,过程500包括确定马达速度大于或等于马达瞬态速度,确定马达功率命令值不满足阈值,以及基于确定马达速度大于或等于马达瞬态速度以及确定马达功率命令值不满足阈值来选择可变停留连续导通模式。在一些实施方式中,操作模式是可变停留连续导通模式,并且可变停留连续导通模式由动态导通角度值定义。在一些实施方式中,操作模式是可变停留连续导通模式,并且可变停留连续导通模式由负载依赖性软转换定义。
48.在一些实施方式中,过程500包括从一组马达扭矩值进行插补以基于操作模式确定马达扭矩值,以及基于马达扭矩值控制开关磁阻马达。在一些实施方式中,过程500包括基于操作模式执行电流斩波。在一些实施方式中,过程500包括使用该操作模式维持恒定功率。
49.尽管图5示出了过程500的示例性框,但在一些实施方式中,过程500可以包括比图5中所描绘的那些框更多的框、更少的框、不同的框或不同布置的框。附加地或替代地,可以并行地执行过程500的框中的两个或更多个框。
50.工业适用性
51.可以与使用马达110的任何机器100一起使用开关磁阻马达控制系统200。在机器100的操作期间,开关磁阻马达控制系统200确定与马达110相关的一个或多个参数,例如马达速度、马达扭矩、马达瞬态速度、向马达110提供的功率命令等,并且使用所述一个或多个参数来选择用于控制马达110的操作模式。通过这种方式,开关磁阻马达控制系统200使得能够进行负载依赖性软转换,例如从单脉冲操作模式到可变停留连续导通操作模式,在各种加载条件下,在从单脉冲操作模式到固定停留连续导通模式的转换中可能无法实现所述负载依赖性软转换。通过这种方式,开关磁阻马达控制系统200改进了对马达110的控制,降低了对马达110造成损坏的可能性,等等。
52.因此,实施可变停留连续导通操作模式和固定停留连续导通操作模式以控制马达110可以改善机器100和/或马达110的操作。
53.如本文所使用,冠词“一(a)”和“一(an)”旨在包括一个或多个物品,且可与“一个或多个”互换使用。此外,如本文中所使用,术语“具有(has)”、“具有(have)”、“具有(having)”等旨在为开放式术语。此外,短语“基于”意图表示“至少部分地基于”。
54.以上公开提供了说明和描述,但并不意图为详尽的或将实施方式限制为所公开的精确形式。修改和变化根据以上公开内容是可能的,或者可从实施方式的实践中获取。说明书旨在仅被认为是示例性的,本公开的真实范围由下文的权利要求书及其等同物限定。即使特征的特定组合在权利要求书中叙述和/或在说明书中公开,这些组合也并非旨在限制可能的实施方式的公开内容。尽管下面列出的每个从属权利要求可直接从属于仅一个权利要求,但可能的实施方式的公开内容包括每个从属权利要求与权利要求集中的每个其它权利要求的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1