一种闸室墙混凝土智能振捣装置
1.本发明涉及施工设备领域,具体是一种闸室墙混凝土智能振捣装置。
背景技术:
2.对于机械振捣,其主要分为以下几类:1)内部振动器(插入式振动器)其缺点在于不适用于配筋特别稠密、厚度很薄的结构和构件,而闸室墙恰好是这种构件;且受振捣时间限制,一般工作时间在2.5
‑
3s,采用高频振捣可减少时间,但至少大于10s,在工作时,时间不能够做到完全的精确控制,若时间过短,混凝土不易振实,时间过长,将会导致离析,这些都将直接影响闸室墙质量,且一般闸室墙现场施工人员不具备极高的专业素养,对时间的把握不一定会十分准确。
3.2)表面振动器(平板振动器)其缺点在于使用前需划分区域,因闸室墙为坞式结构,故区域形状不规则,则将会导致各区域振捣次数不一致;且其移动间距应覆盖上次振捣距离的5cm,使得振捣棒振捣范围利用率低,影响工程工期,将直接影响船闸工程是否顺利完成;且需要将带偏心块的电动振动器安装在钢膜或者模板上,在高频振捣下,容易对模板造成伤害,且影响对拉螺栓的精度,易造成模板与钢筋笼配合不紧密;其只适用于振捣面积大、厚度小的结构和现浇楼板、地坪、预制板,又闸室墙为精密化构件,故此法不适用于配筋特别稠密、形状不规则的闸室墙。
4.3)外部振动器(附着式振动器)其缺点在于只适用于钢筋较密、厚度在30cm以下的墙柱梁、密度、厚度小的场合,而一般闸室墙厚度都在两米以上,故此法不适合闸室墙工况;且使用时模板应固定,需将带偏心块的电动振动器用螺栓固定在模板外侧,在高频振捣下,容易对模板造成伤害,且影响对拉螺栓的精度,易造成模板与钢筋笼配合不紧密,将直接影响闸室墙外形和质量。
[0005] 4)振动台其缺点在于只适用于混凝土预制构件振捣以及实验室制作试块的捣实,不适合闸室墙中混凝土震捣。
[0006]
在一般的施工工况中,闸室全长长度约为几百米,且闸室大多数采用坞式结构。闸室墙是整个船闸运输航道中最重要的部分,其质量的好坏直接关系到运输航道能否顺利完工,由于其工作环境恶劣、现有振捣技术的不完善、质量要求高,施工需花费较长时间,直接影响到水运工作的是否顺利,因此在保证闸室墙质量的条件下,尽可能节省工期、减少劳动力、提高闸室墙质量和安全系数,尽快实现航道通航目标,带来社会效益,是我们追求更加幸福美满生活的目标。
[0007]
目前,船闸施工现场依然采用的是人工振捣的方式,人工振捣是指:现场由于缺少机械和工程量不大的原因,在塑性混凝土时,工人采用快插慢拔的方式进行振捣的方法。
[0008]
对于一般船闸闸室墙的振捣,因为现场施工环境的限制,工人只能深入到十几米
深的闸室墙模板内部,进行一边浇筑一边振捣的工作方式,夏季工作时,闸室墙模板内部温度极高,将会对工人生命安全造成威胁,且由于闸室墙采用坞式结构,人工振捣不能对一些死角进行有效振捣,故闸室墙质量和安全系数会出现一些问题,同时采用人工振捣振捣进度慢,施工工效低,劳动量消耗大,且闸室墙内部全是钢筋,并无可以给工人工作的平台,工人只能借助安全绳进行工作,如果操作不当,极可能造成安全事故。
技术实现要素:
[0009]
本发明的目的在于提供一种闸室墙混凝土智能振捣装置,以解决上述背景技术中提出的问题。为实现上述目的,本发明提供如下技术方案:一种闸室墙混凝土智能振捣装置,包括:x方向行走系统,其上设置有多个行走装置,所述行走装置阵列分布在机盒上,行走装置咬合在模板轨道上,并利用模板轨道带动机盒进行x方向行走;y方向行走系统,其安装在机盒内部,所述y方向行走系统在机盒内部设置有多组往复周期移动结构,往复周期移动结构连接在滑块机盒上,利用往复周期移动结构带动滑块机盒进行y方向行走;z方向行走系统,其安装在滑块机盒内部,所述z方向行走系统上设置有涡轮组结构带动移动的蜗杆,蜗杆在远离滑块机盒一端安装有可调节振捣棒旋转结构,可调节振捣棒旋转结构利用蜗杆和涡轮组结构配合进行z方向行走。
[0010]
x方向行走系统、y方向行走系统和z方向行走系统的三轴向自由度行走系统,代替工人进行施工,机器可进入十几米深闸室墙,防止工人因操作失误出现生命危险;机器规划路线,避免了工人师傅技术有限,振捣过程难免会出现未振捣地方,且对于每一处的振捣次数难免会出现大的偏差;对于一些边边角角,通过可调节振捣棒旋转机构,配合三轴向自由度行走系统,可实现对任意位置、任意角落的振捣;进而,可适用于钢筋笼密度大、振捣区域不规则、工量大、工况复杂、工作环境恶劣的闸室墙;可适用于施工人员专业知识欠缺、工程量大、精度高、安全性高的场合;可极大的减少工期,提高施工速度;可减少施工人员数量,减少不必要的劳动量损失;震捣过程从开始到结束,都由装备自动化完成,全程不需要人员参与;可适用不同种结构形状的工况,利用率高,装备可被反复利用,节省成本。
[0011]
解决了对于闸室墙质量的保证存在随机性,由于施工人员技术有限,且闸室墙呈坞式结构,凭借现有设备和操作人员不能做到对闸室墙内每一处进行振捣;在施工过程中施工人员需深入到十几米深的闸室墙底部进行振捣,极易发生安全事故;人工振捣进度慢,施工工效低,劳动量消耗大的问题。
[0012]
在本发明闸室墙混凝土智能振捣装置中:所述行走装置通过螺栓连接在机盒上,行走装置上设置有行走轮,而行走轮咬合在模板轨道上;模板轨道铺设在闸室墙模板上。
[0013]
其中,行走装置设置有四个,其位置位于机盒下端四个受力最大处,而行走装置的数量并不局限于设置有四个,还可以是两个、六个、八个、十个.......只要能满足其位置位于机盒下端四个受力最大处即可,优选的所述行走装置设置有四个。
[0014]
在本发明闸室墙混凝土智能振捣装置中:所述y方向行走系统上设有的往复周期移动结构上设置有电机ⅱ,电机ⅱ上转动连接有滚珠丝杠;滚珠丝杠上螺丝传动连接有滑轨滑块,滑轨滑块固定在滑块机盒。
[0015]
进一步的方案:所述滚珠丝杠一端通过尾端固定支座转动连接在机盒上,另一端穿插通过中断固定支座,并利用中断固定支座转动连接在机盒上。
[0016]
进一步的方案:所述电机ⅱ和滚珠丝杠之间设置有联轴器和转轴ⅱ;联轴器上设置有轴承。
[0017]
进一步的方案:所述滑轨滑块配合蜗杆开设有穿插孔。
[0018]
在本发明闸室墙混凝土智能振捣装置中:所述z方向行走系统上设置有的涡轮组结构上设有涡轮,涡轮固定在转轴ⅰ上;在涡轮一侧的转轴ⅰ上固定有直齿圆柱齿轮ⅰ,直齿圆柱齿轮ⅰ啮合有直齿圆柱齿轮ⅱ;直齿圆柱齿轮ⅱ固定在电机ⅰ的输出轴上。
[0019]
在本发明闸室墙混凝土智能振捣装置中:所述可调节振捣棒旋转结构上设有真空棒,而真空棒通过转动螺栓和直杆连接有自锁套筒。
[0020]
与现有技术相比,本发明的有益效果是:(1)可适用于钢筋笼密度大、振捣区域不规则、高度大于10m、厚度大于30cm、工量大、工况复杂、工作环境恶劣的闸室墙;(2)可适用于施工人员专业知识欠缺、工程量大、精度高、安全性高的场合;(3)可极大的减少工期,提高施工速度;(4)可减少施工人员数量,减少不必要的劳动量损失;(5)震捣过程从开始到结束,都由装备自动化完成,全程不需要人员参与;(6)此装备可适用不同种结构形状的工况,利用率高,装备可被反复利用,节省成本。
附图说明
[0021]
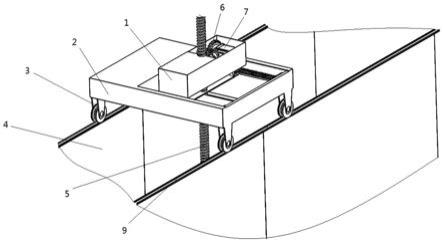
图1为本发明闸室墙混凝土智能振捣装置的立体结构示意图。
[0022]
图2为本发明闸室墙混凝土智能振捣装置的主视结构示意图。
[0023]
图3为图1中机盒的横向剖面结构示意图。
[0024]
图4为图1中滑块机盒和机盒的纵向剖面结构示意图。
[0025]
图5为图2中可调节振捣棒旋转结构的结构示意图。
[0026]
图中:1
‑
滑块机盒;2
‑
机盒;3
‑
行走装置;4
‑
闸室墙模板;5
‑
蜗杆;6
‑
涡轮;7
‑
电机ⅰ;8
‑
可调节振捣棒旋转结构;9
‑
模板轨道;21
‑
尾端固定支座;22
‑
滚珠丝杠;23
‑
滑轨滑块;24
‑
中断固定支座;25
‑
轴承;26
‑
电机ⅱ;27
‑
直齿圆柱齿轮ⅰ;28
‑
转轴ⅰ;29
‑
直齿圆柱齿轮ⅱ;81
‑
真空棒;82
‑
转动螺栓;83
‑
自锁套筒;84
‑
直杆;251
‑
联轴器;252
‑
转轴ⅱ。
具体实施方式
[0027]
下面结合具体实施方式对本发明的技术方案作进一步详细地说明。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0028]
对于闸室墙质量的保证存在随机性,由于施工人员技术有限,且闸室墙呈坞式结构,凭借现有设备和操作人员不能做到对闸室墙内每一处进行振捣;在施工过程中施工人员需深入到十几米深的闸室墙底部进行振捣,极易发生安全事故;人工振捣进度慢,施工工效低,劳动量消耗大的问题,本发明的目的在于提供一种闸室墙混凝土智能振捣装置,以解决上述提出的问题。为实现上述目的,本发明提供如下技术方案:本发明实施例中,如图1
‑
4所示,一种闸室墙混凝土智能振捣装置,包括:x方向行走系统,其上设置有多个行走装置3,所述行走装置3阵列分布在机盒2上,行走装置3咬合在模板轨道9上,并利用模板轨道9带动机盒2进行x方向行走;y方向行走系统,其安装在机盒2内部,所述y方向行走系统在机盒2内部设置有多组往复周期移动结构,往复周期移动结构连接在滑块机盒1上,利用往复周期移动结构带动滑块机盒1进行y方向行走;z方向行走系统,其安装在滑块机盒1内部,所述z方向行走系统上设置有涡轮组结构带动移动的蜗杆5,蜗杆5在远离滑块机盒1一端安装有可调节振捣棒旋转结构8,可调节振捣棒旋转结构8利用蜗杆5和涡轮组结构配合进行z方向行走。
[0029]
本发明实施例中,x方向行走系统、y方向行走系统和z方向行走系统的三轴向自由度行走系统,代替工人进行施工,机器可进入十几米深闸室墙,防止工人因操作失误出现生命危险;机器规划路线,避免了工人师傅技术有限,振捣过程难免会出现未振捣地方,且对于每一处的振捣次数难免会出现大的偏差;对于一些边边角角,通过可调节振捣棒旋转机构8,配合三轴向自由度行走系统,可实现对任意位置、任意角落的振捣;进而,可适用于钢筋笼密度大、振捣区域不规则、工量大、工况复杂、工作环境恶劣的闸室墙;可适用于施工人员专业知识欠缺、工程量大、精度高、安全性高的场合;可极大的减少工期,提高施工速度;可减少施工人员数量,减少不必要的劳动量损失;震捣过程从开始到结束,都由装备自动化完成,全程不需要人员参与;可适用不同种结构形状的工况,利用率高,装备可被反复利用,节省成本。
[0030]
本发明实施例中,如图1所示,所述行走装置3通过螺栓连接在机盒2上,行走装置3上设置有行走轮,而行走轮咬合在模板轨道9上;模板轨道9铺设在闸室墙模板4上。
[0031]
其中,行走装置3设置有四个,其位置位于机盒2下端四个受力最大处,而行走装置3的数量并不局限于设置有四个,还可以是两个、六个、八个、十个.......只要能满足其位置位于机盒2下端四个受力最大处即可,优选的所述行走装置3设置有四个。
[0032]
本发明实施例中,如图3所示,所述y方向行走系统上设有的往复周期移动结构上设置有电机ⅱ26,电机ⅱ26上转动连接有滚珠丝杠22;滚珠丝杠22上螺丝传动连接有滑轨滑块23,滑轨滑块23固定在滑块机盒1。
[0033]
具体的,所述滚珠丝杠22一端通过尾端固定支座21转动连接在机盒2上,另一端穿插通过中断固定支座24,并利用中断固定支座24转动连接在机盒2上;所述电机ⅱ26和滚珠丝杠22之间设置有联轴器251和转轴ⅱ252;联轴器251上设置有轴承25;所述滑轨滑块23配合蜗杆5开设有穿插孔。
[0034]
本发明实施例中,如图2、4和5所示,所述z方向行走系统上设置有的涡轮组结构上设有涡轮6,涡轮6固定在转轴ⅰ28上;在涡轮6一侧的转轴ⅰ28上固定有直齿圆柱齿轮ⅰ27,直齿圆柱齿轮ⅰ27啮合有直齿圆柱齿轮ⅱ29;直齿圆柱齿轮ⅱ29固定在电机ⅰ7的输出轴上。所
述可调节振捣棒旋转结构8上设有真空棒81,而真空棒81通过转动螺栓82和直杆84连接有自锁套筒83。
[0035]
一种智能振捣系统的使用方法:(1)根据实际闸室墙尺寸设计模板尺寸,应使得模板与钢筋笼相匹配,模板边缘应布置在外侧,布置钢轨在模板上,采用螺栓连接使模板与钢轨相连接;(2)智能振捣系统三自由度系统设计:(2
‑
1)对于x方向行走系统,在加工工厂进行行走系统组装,根据成本情况选择是否安装电机,采用螺栓连接将行走装置3与机盒2底板相连接,然后测试行走装置3的平行度,保证其运动路线和模板轨道9一致,待机盒2整体安装完毕后,运送至现场,采用电动葫芦将装置吊起,完成与模板轨道9的配合,若出现平行度问题应及时调整小车安装位置;(2
‑
2)对于y方向行走系统,在加工工厂对其进行组装,从左到右,依次将电机ⅱ26与机盒2通过螺栓连接,然后依次连接联轴器251、中断固定支座24、滚珠丝杠22、尾部支座21,最后将尾部支座21与机盒2进行螺栓连接,然后将滑块机盒1与两个滚珠丝杠22进行移动副配合,滑块机盒1需与滚珠丝杠22保持垂直关系,对于控制此方向的电机,应保证这两电机同频率、同功率、同速度,以保证运行时的平行度,在机盒上布置处置于闸室墙方向的间隙,用来当做蜗杆在此方向上移动的通道;(2
‑
3)对于z方向行走系统,在加工工厂对其进行组装,对于蜗杆5的选择上,首先对其直径和强度有一定的要求,因需要对蜗杆5进行开孔,保证可调节振动棒旋转机构8的顺利运行,在装配上,首先将电机ⅰ7按垂直于闸室墙方向布置在滑块机盒1上,电机ⅰ7与滑块机盒1底部和侧面进行螺栓连接,且转轴ⅰ28一端与电机ⅰ7相连,一端与滑块机盒1侧面相连,然后在该转轴ⅰ28上布置直齿圆柱齿轮ⅰ27和直齿圆柱齿轮ⅱ29,在布置两端都与滑块机盒1侧面相连的转轴ⅰ28,在其上布置涡轮6,最后在在滑块机盒1内部开一直径大于蜗杆5直径的穿插孔,以便蜗杆5在此方向运动,且蜗杆5与涡轮6之间组成螺旋副;对于蜗杆5的直径,根据闸室墙实际深度进行选择,对于此装置电机ⅰ7的选择,应根据实际浇筑混凝土深度进行选择,且应考虑在最深处时所受重力和压力;(3)可调节振捣棒旋转机构8,在蜗杆5下端布置有回转孔,将真空棒81与蜗杆5进行焊接,将直杆84插入蜗杆5内部孔中,然后将自锁套筒83与蜗杆5以及直杆84分别以转动副相连,其中,可将直杆84改为链条,然后链条与自锁套筒84间以钥匙扣结构连接,通过拉动直杆或者链条来控制转动,不同功率的振捣棒棒体形状都是末端粗上端细的结构。
[0036]
本发明的工作原理是:本发明闸室墙混凝土智能振捣装置,包括:x方向行走系统,其上设置有多个行走装置3,所述行走装置3阵列分布在机盒2上,行走装置3咬合在模板轨道9上,并利用模板轨道9带动机盒2进行x方向行走;y方向行走系统,其安装在机盒2内部,所述y方向行走系统在机盒2内部设置有多组往复周期移动结构,往复周期移动结构连接在滑块机盒1上,利用往复周期移动结构带动滑块机盒1进行y方向行走;z方向行走系统,其安装在滑块机盒1内部,所述z方向行走系统上设置有涡轮组结构带动移动的蜗杆5,蜗杆5在远离滑块机盒1一端安装有可调节振捣棒旋转结构8,可调节振捣棒旋转结构8利用蜗杆5和涡轮组结构配合进行z方向行走;x方向行走系统、y方向行走系统和z方向行走系统的三轴向自由度行走系统,代替工人进行施工,机器可进入十几米深闸室墙,防止工人因操作失误出现生命危险;机器规划路线,避免了工人师傅技术有限,振捣过程难免会出现未振捣地
方,且对于每一处的振捣次数难免会出现大的偏差;对于一些边边角角,通过可调节振捣棒旋转机构8,配合三轴向自由度行走系统,可实现对任意位置、任意角落的振捣;进而,可适用于钢筋笼密度大、振捣区域不规则、工量大、工况复杂、工作环境恶劣的闸室墙;可适用于施工人员专业知识欠缺、工程量大、精度高、安全性高的场合;可极大的减少工期,提高施工速度;可减少施工人员数量,减少不必要的劳动量损失;震捣过程从开始到结束,都由装备自动化完成,全程不需要人员参与;可适用不同种结构形状的工况,利用率高,装备可被反复利用,节省成本。
[0037]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
[0038]
上面对本发明的较佳实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1