机械自动抓梁装置的制作方法
1.本实用新型及一种机械自动抓梁装置。适用于水利水电领域。
背景技术:
2.自动抓梁是水电站门式启闭机的专用取物装置,在水利水电工程中广泛采用,特别是当采用移动式启闭机操作多扇闸门时,通过自动抓梁操作可以有效避免吊轴的频繁拆装。自动抓梁性能好坏直接影响启闭机的可靠性与工作效率。
3.机械自动抓梁的可靠对位以及自动连接闸门吊轴是抓取闸门的关键。在闸门启闭时,抓梁与闸门吊轴的连接过程在水下完成,无法直接观测,这就要求抓梁挂脱闸门吊轴安全可靠,因此在深水中能自动与闸门挂钩、脱钩的自动抓梁可靠性非常重要。
技术实现要素:
4.本实用新型要解决的技术问题是:针对上述存在的问题,提供一种结构简单、安全可靠、操作简便的机械自动抓梁装置。
5.本实用新型所采用的技术方案是:一种机械自动抓梁装置,用于自动抓取和释放闸门上的闸门吊轴,其特征在于:具有抓梁体,抓梁体两端均经导向轮机构支撑于闸门两侧的闸门槽内,抓梁体上安装有能夹紧所述闸门吊轴的夹紧装置;
6.所述夹紧装置具有固定于所述抓梁体上的安装座,安装座下端安装有由左爪和右爪组成的爪钳,左爪和右爪上部分别经转轴可转动安装于安装座上,所述安装座上安装有能在爪钳夹紧并提起闸门吊轴时锁定左爪和右爪相对位置的锁定机构,对应锁定机构设有能使锁定机构解锁的解锁机构;
7.所述闸门上设有与上方所述解锁机构对应的并能在闸门接近底槛时向上伸出触动解锁机构使锁定机构解锁的解锁操作杆。
8.所述锁定机构具有位于所述左爪和右爪之间位置上方的锁定楔块,锁定楔块经限位套可上下移动的安装于所述安装座上;
9.所述左爪上部制有左沟槽,右爪上部制有右沟槽,当左爪和右爪转动到夹紧所述闸门吊轴位置时,左沟槽与右沟槽之间形成与所述锁定楔块对应的卡槽;
10.当左沟槽与右沟槽之间形成卡槽时,所述锁定楔块能在其自身重力作用下进入卡槽,从而锁定左爪和右爪的相对位置。
11.所述解锁机构具有经水平转轴可转动连接于所述锁定楔块上端的旋转杆,旋转杆一端经链条ⅰ向上连接手动提升机构,旋转杆另一端设有平衡重并经链条ⅱ向上连接所述抓梁体,所述旋转杆上、在平衡重与水平转轴之间对应下方的所述解锁操作杆设有能支撑于解锁操作杆顶端上的支撑件;
12.当支撑件支撑与解锁操作杆顶端时,旋转杆一端的平衡重能在其自身重力作用下绕支撑件向下转动,从而能向上提升位于旋转杆另一端的锁定楔块实现锁定机构解锁。
13.所述解锁操作杆可竖向移动的插装于所述闸门的竖向通孔内,解锁操作杆长度大
于闸门高度。
14.所述导向轮装置中的导向轮上有制有一圈导向凹槽,闸门两侧的闸门槽内制有与导向凹槽适配的导向凸起条。
15.一种所述机械自动抓梁装置的使用方法,其特征在于:
16.a、自动挂钩:
17.初始时,爪钳在其自身重力作用下处于张开状态;
18.在抓梁装置下降到闸门上时,闸门吊轴相对向上进入爪钳并在爪钳钳口内对左、右爪尾部施加向上压力,左、右爪转动,左、右爪尖部拼合并在左、右爪尾部形成由左爪上的左沟槽和右爪上的右沟槽组成的卡槽;
19.锁定机构中的锁定楔块在自重的作用下向下移动进入卡槽;
20.提起抓梁装置,闸门吊轴在爪钳钳口内对左、右爪尖部施加向下压力,由于锁定楔块插装于左、右爪尾部形成的卡槽内,导致左、右爪无法转动,仅能夹紧卡槽内的锁定楔块;
21.b、自动脱钩:
22.抓梁装置与闸门连接,爪钳夹持闸门上的闸门吊轴,闸门吊轴在爪钳钳口内对左、右爪尖部施加向下压力;
23.抓梁装置与闸门下降,在闸门接近底槛时,闸门底槛上的解锁操作杆从闸门上端伸出,支撑解锁机构中的支撑件,使解锁机构中的旋转杆的支撑件端绕锁定楔块上的水平转轴向上转动;
24.闸门接触底槛后,抓梁装置继续下降,直到闸门吊轴在爪钳钳口内不再对左、右爪尖部施加向下压力,卡槽松开锁定楔块;
25.解锁机构中的旋转杆的远离锁定楔块端在平衡重的重力作用下绕支撑件向下转动,将接于旋转杆另一端的锁定楔块从卡槽中向上拉出;
26.抬起抓梁装置,闸门吊轴在爪钳钳口内对左、右爪尖部施加向下压力,左、右爪转动,爪钳张开,抓梁装置与闸门吊轴脱离;支撑件与解锁操作杆分离后,锁定楔块在其自重作用下向下移动至于爪钳上。
27.本实用新型的有益效果是:本实用新型通过爪钳与锁定机构配合,在闸门吊轴进入爪钳钳口后实现自动挂钩,通过解锁机构与解锁操作杆配合实现自动脱锁,从而可实现机械抓梁在水深无法观测到情况下,能实现抓梁与闸门吊轴自动挂、脱钩。
28.本实用新型中锁定机构通过锁定楔块与左、右爪之间形成的卡槽配合,在左、右爪尖部受到向下压力时,锁定楔块阻挡左、右爪的转动位置,使左、右爪无法转动,从而实现爪钳夹持闸门吊轴。
29.本实用新型中解锁机构通过可转动安装于锁定楔块上的旋转杆,结合支撑件和平衡重,可在闸门靠近底槛时在解锁操作杆的作用下使锁定机构解锁,使左、右爪恢复可转动状态,从而实现自动脱锁。
30.本实用新型与普通抓梁相比,具有结构简单、可靠、安装方便、操作简便、可灵活布置的优点,大大提高了移动式启闭机抓梁工作的可靠性。
附图说明
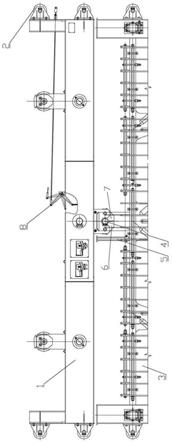
31.图1为实施例的结构示意图。
32.图2为实施例中自动挂钩作业的示意图。
33.图3为实施例中自动脱钩作业的示意图。
34.图4为实施例中手动脱钩作业的示意图。
35.图中:1、抓梁体;2、导向轮;3、闸门;4、闸门吊轴;5、解锁操作杆; 6、左爪;6
‑
1、左沟槽;7、右爪;7
‑
1、右沟槽;8、手动提升机构;9、锁定楔块;10、旋转杆;11、平衡重;12、支撑件;13、链条ⅰ;14、链条ⅱ;15、安装座;16、限位套;
具体实施方式
36.本实施例为一种机械自动抓梁装置,具有抓梁体1,抓梁体1两端均经导向轮2机构支撑于闸门3两侧的闸门3槽内。抓梁体1一般设计为箱形或工字型结构,其两端共设置4个导向轮2,导向轮2上制有一圈导向凹槽,闸门3两侧的闸门3槽内制有与导向凹槽适配的导向凸起条,运行时导向轮2嵌入到闸门3 槽的导向凸起条。
37.本例中在抓梁体1上安装有夹紧装置,通过夹紧装置可夹持闸门3上的闸门吊轴4。本实施例中夹紧装置包括安装座15、爪钳、锁定机构和解锁机构,其中安装座15固定于抓梁体1上,爪钳左爪6和右爪7组成,左爪6和右爪7 上部分别经转轴可转动安装于安装座15上。
38.本实施例中锁定机构具有位于左爪6和右爪7中间位置上方的锁定楔块9,锁定楔块9经限位套16可上下移动的安装于安装座15上。本例在左爪6上部制有左沟槽6
‑
1,右爪7上部制有右沟槽7
‑
1,当左爪6和右爪7转动到左爪6 下端尖部与右爪7下端尖部靠近接触时,随左、右爪7转动后的左沟槽6
‑
1与右沟槽7
‑
1形成卡槽,卡槽的位置与上方的锁定楔块9对应,卡槽形成后锁定楔块9会在其自重作用下下移至卡槽内,从而锁定左爪6和右爪7的相对位置,使左爪6和右爪7无法转动。
39.本实施例中解锁机构具有经水平转轴可转动连接于锁定楔块9上端的旋转杆10,旋转杆10一端经链条ⅰ13向上连接手动提升机构8,旋转杆10另一端设有平衡重11并经链条ⅱ14向上连接抓梁体1,在旋转杆10上、平衡重11与水平转轴之间设有垂直旋转杆10向下的支撑件12,支撑件12可调节其相对旋转杆10向下伸出的距离(如采用垂直螺纹连接于旋转杆10上螺纹通孔内的螺钉)。
40.本例中在闸门3上设有与上方解锁机构中的支撑件12位置对应的解锁操作杆5,该解锁操作杆5能在闸门3接近底槛时从闸门3上端向上伸出,支撑解锁机构中的支撑件12。解锁操作杆5可竖向移动的插装于闸门3的竖向通孔内,解锁操作杆5长度大于闸门3高度。
41.当支撑件12支撑于解锁操作杆5顶端时,旋转杆10一端的平衡重11能在其自身重力作用下绕支撑件12向下转动,从而能向上提升位于旋转杆10另一端的锁定楔块9,以实现锁定机构解锁。
42.本实施例中的机械自动抓梁装置可实现自动挂钩、自动脱钩和手动脱钩,其中机械自动抓梁装置的自动挂钩方法如下:
43.初始状态时,爪钳在左爪6和右爪7自身重力作用下处于张开状态,锁定楔块9在其自身重力作用下置于左爪6和右爪7上,旋转杆10的平衡重11端在平衡重11的重力作用下绕锁定楔块9上方的水平转轴向下移动直至拉直链条ⅱ14;
44.调高旋转杆10上支撑件12的位置,避免支撑件12与下方的解锁操作杆5 接触;
45.在抓梁装置下降到闸门3上时,闸门3上端的闸门吊轴4相对向上移动进入爪钳并
在爪钳钳口内对左、右爪7尾部施加向上压力,左、右爪7绕转轴转动,左、右爪7尖部拼合,随左、右爪7转动后的左沟槽6
‑
1和右沟槽7
‑
1组成与上方锁定楔块9对应的卡槽;
46.锁定楔块9在自重的作用下向下移动,落入左、右爪7之间形成的卡槽内;
47.提起抓梁装置,闸门吊轴4相对向下移动,在爪钳钳口内对左、右爪7尖部施加向下压力,由于锁定楔块9插装于左、右爪7尾部形成的卡槽内,导致左、右爪7无法转动,仅能使左沟槽6
‑
1和右沟槽7
‑
1夹紧锁定楔块9,从而使闸门吊轴4无法脱离爪钳,实现自动挂钩。
48.本实施例中机械自动抓梁装置的自动脱钩方法如下:
49.调低旋转杆10上支撑件12的位置,确保支撑件12能与下方的解锁操作杆 5顶端接触;
50.抓梁装置与闸门3连接,爪钳夹持闸门3上的闸门吊轴4,闸门吊轴4在爪钳钳口内对左、右爪7尖部施加向下压力,左、右爪7上部的左沟槽6
‑
1和右沟槽7
‑
1夹紧锁定楔块9;
51.抓梁装置与闸门3下降,在闸门3接近底槛时,闸门3底槛上的解锁操作杆5从闸门3上端伸出,支撑解锁机构中的支撑件12,使解锁机构中的旋转杆 10的支撑件12端绕锁定楔块9上的水平转轴向上转动;
52.闸门3接触底槛后,抓梁装置继续下降,直到闸门吊轴4在爪钳钳口内不再对左、右爪7尖部施加向下压力,左、右爪7上部的左沟槽6
‑
1和右沟槽7
‑
1 松开锁定楔块9;
53.解锁机构中的旋转杆10的远离锁定楔块9端在平衡重11的重力作用下绕支撑件12于解锁操作杆5的接触点向下转动,将接于旋转杆10另一端的锁定楔块9从卡槽中向上拉出;
54.抬起抓梁装置,闸门吊轴4在爪钳钳口内对左、右爪7尖部施加向下压力,左、右爪7转动,爪钳张开,抓梁装置与闸门吊轴4脱离;支撑件12与解锁操作杆5分离后,锁定楔块9在其自重作用下向下移动,置于左爪6和右爪7上,回到初始状态。
55.本实施例中机械自动抓梁装置的手动脱钩方法如下:通过手动提升机构8 向上提升链条ⅰ13,使旋转杆10的链条ⅰ13端绕旋转杆10与链条ⅱ14的连接点向上转动,转动锁定楔块9向上移动,从卡槽内拉出,锁定楔块9从卡槽拉出后,锁定机构解锁,左、右爪7可转动,爪钳可被打开。
56.上述实施例仅用于解释说明本实用新型的实用新型构思,而非对本实用新型权利保护的限定,凡利用此构思对本实用新型进行非实质性的改动,均应落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1