工程机械的制作方法
1.本发明涉及在周围检测到障碍物时对旋转或行驶动作进行限制的工程机械。
背景技术:
2.例如,在专利文献1中记载了一种在液压挖掘机等工程机械中,在检测到工程机械周围的障碍物(人或物体)时,避免车体接近周围的障碍物的技术。
3.在专利文献1中,在预定范围内检测到障碍物时,降低发动机转速来降低泵排出流量从而限制工程机械的动作,并唤起操作员的注意,由此避免车体接近障碍物。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2014-218849号公报
技术实现要素:
7.发明要解决的课题
8.在液压挖掘机等工程机械中,通过进行使发动机转速上升的控制在起动时加快暖机速度,或者进行提高废气后处理装置的温度来使过滤器再生的控制。
9.在专利文献1中,在这些控制中,在检测到障碍物时降低发动机转速来限制动作,因此有可能无法正常进行暖机,或者排出气体后处理装置的性能有可能降低。另外,在进行使发动机转速上升的控制时,每当检测到障碍物时降低发动机转速,发动机转速反复变动,发动机声音的变化对操作员带来不适感。为了避免这样的问题,当即使在检测到障碍物时也使发动机转速上升的控制有效时,由于发动机转速不降低,因此车体的动作速度不会变慢,有可能无法避免接近周围障碍物。
10.本发明的目的在于提供一种工程机械,能够实现兼顾检测到障碍物时进行的限制车体动作的控制和使发动机转速上升的控制。
11.用于解决课题的手段
12.为了解决这样的课题,本发明的工程机械具备:搭载在车体上的发动机;由所述发动机驱动的可变容量型的液压泵;由从所述液压泵排出的液压油驱动的多个液压致动器;控制从所述液压泵向所述液压致动器供给的液压油的流量的多个方向控制阀;检测所述车体周围的障碍物的障碍物检测装置;以及在由所述障碍物检测装置检测到所述障碍物时进行限制所述车体动作的动作限制控制的控制装置,在所述车体不要求使所述发动机的转速上升的发动机转速上升控制,并且所述障碍物检测装置检测到障碍物时,所述控制装置通过进行使所述发动机的转速降低的控制来进行所述动作限制控制,在所述车体要求所述发动机转速上升控制,并且所述障碍物检测装置检测到障碍物时,所述控制装置进行使从所述液压泵向所述多个液压致动器供给的液压油的流量减少的供给流量减少控制,由此进行所述动作限制控制。
13.在这样构成的本发明中,控制装置在车体要求发动机转速上升控制,且障碍物检
测装置检测到障碍物时,通过进行使从液压泵向多个液压致动器供给的液压油的流量减少的供给流量减少控制来进行动作限制控制,因此能够不损害发动机转速上升控制地进行动作限制控制,能够实现兼顾限制车体动作的控制和使发动机转速上升的控制。
14.发明效果
15.根据本发明,能够实现兼顾检测到障碍物时限制车体动作的控制和使发动机转速上升的控制。因此,即使在进行发动机转速上升控制时,也能够避免车体接近周围障碍物。
附图说明
16.图1表示作为本发明的第一实施方式的工程机械的一例的液压挖掘机的外观。
17.图2表示障碍物检测装置的搭载位置以及检测区域。
18.图3表示本发明的第一实施方式的动作限制系统的结构。
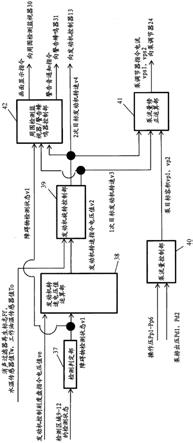
19.图4是表示本发明的第一实施方式的车体控制器的处理内容的框图。
20.图5是表示检测判定部的处理内容的流程图。
21.图6是表示发动机转速电压值运算部的处理内容的流程图。
22.图7是表示发动机旋转控制部的处理内容的流程图。
23.图8是表示泵流量控制部的处理内容的功能框图。
24.图9是表示泵流量修正运算部的处理内容的功能框图。
25.图10是表示周围检测监视器/警告蜂鸣器控制部的处理内容的流程图。
26.图11表示本发明的第二实施方式的工程机械的系统结构。
27.图12是一框图,其表示第二实施方式的车体控制器在检测到障碍物时的车体动作限制所涉及的控制功能。
28.图13是表示第二实施方式的操作压限制控制部的处理内容的流程图。
29.图14表示本发明的第三实施方式的工程机械的系统结构。
30.图15是表示车体控制器中的与发动机转速指令值相关的部分的流程图。
31.图16是表示动作限制控制器的处理内容的流程图。
具体实施方式
32.以下,根据附图对本发明的实施方式进行说明。
33.《第一实施方式》
34.《工程机械》
35.图1表示作为本发明第一实施方式的工程机械的一例的液压挖掘机的外观。
36.在图1中,液压挖掘机(工程机械)具备:履带式的下部行驶体1、以相对于下部行驶体1可旋转的方式设置的上部旋转体2、以及以能够在上下方向上转动的方式与上部旋转体2的前部连结的前作业机3。
37.下部行驶体1具备左右一对行驶用液压马达1c、1d,通过该行驶用液压马达1c、1d独立地旋转驱动左右的履带1a、1b从而向前方或后方行驶。
38.上部旋转体2具备用于进行液压挖掘机的各种操作的操作杆装置16、17、18(参照图3)、配置有操作员乘坐的驾驶席等的驾驶室4、发动机19(参照图3)、液压泵21(参照图3)以及旋转马达2a等,通过旋转马达2a使上部旋转体2相对于下部行驶体1向右方向或者左方
向旋转。在驾驶室4内,除了用于操作员确认液压挖掘机状况的各种计量仪器类、显示车体信息的显示装置(未图示)之外,还配置有后述的设备。以下,有时将整个液压挖掘机(工程机械)称为车体。
39.前作业机3由动臂3a、斗杆3b及铲斗3c构成,动臂3a通过动臂液压缸3d而上下移动,斗杆3b通过斗杆液压缸3e被操作到倾卸侧(打开侧)或铲装侧(铲入侧),铲斗3c通过铲斗液压缸3f被操作到倾卸侧或铲装侧。
40.《障碍物检测装置》
41.在液压挖掘机的车体后端,在左侧端以及右侧端搭载有用于检测车体周围的障碍物(作业者等人或物)的障碍物检测装置即3d传感器5、6、7、8。在此所说的“车体”是指上部旋转体2。3d传感器5、6、7、8是光脉冲飞行时间测量法(tof,time-of-flight)方式的红外线传感器,能够判定在预定的检测范围内是否检测到物体,并将该判定结果作为检测信号通过can通信进行输出。作为障碍物检测装置,也可以使用3d传感器5、6、7、8以外的传感器。
42.《障碍物检测装置的检测区域》
43.图2表示障碍物检测装置的搭载位置以及检测区域。
44.3d传感器5搭载在液压挖掘机的上部旋转体2的上部后端的左侧,3d传感器6搭载在上部旋转体2的上部后端的右侧,3d传感器7搭载在上部旋转体2的上部左侧端的前后方向的中央附近,3d传感器8搭载在上部旋转体2的上部右侧端的前后方向的中央附近。对3d传感器5、6、7、8设定了能够在垂直方向和水平方向上进行检测的范围(角度),4个3d传感器5、6、7、8的检测范围能够从上部旋转体2的上部右侧端和上部左侧端的前后方向的中央附近(例如驾驶室4的后端部分)开始覆盖后方的车体周围空间。
45.利用这些3d传感器5、6、7、8的检测范围,在液压挖掘机开始动作时,设定了用于降低液压挖掘机与周围障碍物(作业者等人或物体)发生碰撞(接触)的可能性的检测区域。即,设定检测区域,使得能够在液压挖掘机开始旋转/行驶的短时间内检测到在上部旋转体2移动的范围内存在的障碍物,将3d传感器5检测的范围决定为检测区域9,将3d传感器6检测的范围决定为检测区域10,将3d传感器7检测的范围决定为检测区域11,将3d传感器8检测的范围决定为检测区域12。另外,关于检测区域9、10、11、12,将一定高度以上设定为检测区域,使得不会将液压挖掘机自身的下部行驶体1的履带检测为障碍物。
46.《障碍物的检测》
47.3d传感器5、6、7、8判定在各自的检测区域中是否存在障碍物,当判定为在各个检测区域9、10、11、12内存在1个以上的障碍物(人或物体)时视为检测到障碍物,输出表示检测区域9、10、11、12的检测状态的检测信号。
48.《系统结构》
49.图3表示本实施方式的动作限制系统的结构。
50.在本实施方式的液压挖掘机的驾驶室4内配置有:对整个车体的动作进行控制的车体控制器13(控制装置);用于对锁止阀25进行切换的杆式开关即锁定开关14,其中,锁止阀25对液压挖掘机可否动作进行切换;以及用于手动变更发动机19的转速的发动机控制刻度盘15。
51.另外,在液压挖掘机的驾驶室4内设置有进行液压挖掘机的各种操作的操作装置。在图3中,作为操作装置,示出了旋转操作杆装置16、行驶操作杆装置17和前操作杆装置18。
旋转操作杆装置16是进行左旋转操作和右旋转操作的操作装置。行驶操作杆装置17包含用于进行左前进行驶操作及左后退行驶操作的操作杆装置17a、用于进行右前进行驶操作及右后退行驶操作的操作杆装置17b,前操作杆装置18包含用于进行动臂上升操作及动臂下降操作的操作杆装置18a、用于进行斗杆铲装操作及斗杆倾卸操作的操作杆装置18b、用于进行铲斗铲装操作及铲斗倾卸操作的操作杆装置18c。在图3中,为了方便图示,以行驶操作杆装置17为代表示出了操作杆装置17a、17b,以前操作杆装置18为代表示出了操作杆装置18a、18b、18c。
52.本实施方式的液压挖掘机搭载有发动机(柴油发动机)19作为原动机,发动机19与发动机控制器20电连接。在发动机19内安装有检测散热器水温的水温传感器32a、未图示的拾取传感器(旋转传感器)。另外,在发动机19内安装有废气后处理装置51,该废气后处理装置51具备对废气中含有的烟灰进行过滤的消声过滤器,在废气后处理装置51中具备对消声过滤器前后的差压进行测定的压差传感器51a。将水温传感器32a以及未图示的拾取传感器的检测信号以及废气后处理装置51的压差传感器51a的检测信号发送至发动机控制器20。发动机控制器20根据压差传感器51a的检测信号监测压差是否超过了阈值,当压差超过阈值时,设定用于进行消声过滤器再生控制的标志(以下称为消声过滤器再生控制标志),其中,消声过滤器再生控制是指使排气温度升高来将消声过滤器中滞留的颗粒物(烟灰)燃烧去除。
53.液压泵21是由发动机19驱动的可变容量式的液压泵,从液压泵21排出的工作油经过内置有多个方向切换阀的控制阀22,被供给至多个液压致动器即行驶马达1c、1d、旋转马达2a、动臂液压缸3d、斗杆液压缸3e、铲斗液压缸3f。
54.通常在液压挖掘机中考虑同时操作多个液压致动器的状况等,搭载有2台液压泵。在图3中,为了方便图示,仅示出1台液压泵,对液压泵21标注“21a”及“21b”的符号,表示液压泵21为2台。
55.另外,从2台液压泵21a、21b中的一个液压泵21a(以下称为第一液压泵21a)排出的工作油用于驱动动臂液压缸3d、斗杆液压缸3e、铲斗液压缸3f、右行驶马达1d,从另一个液压泵21b(以下称为第二液压泵21b)排出的工作油用于驱动左行驶马达1c、旋转马达2a、动臂液压缸3d、斗杆液压缸3e。
56.操作杆装置16、17、18分别内置有作为手动减压阀的先导阀,根据杆的操作量对从先导液压源23供给的先导一次压进行减压来生成二次压。生成的二次压使设置在控制阀22内的作为换向阀的多个滑阀移动,由此调整从液压泵21排出的工作油的流动(流量和流动方向),由此控制对应的液压致动器的驱动速度和驱动方向。
57.先导液压源23由通过发动机19驱动的先导泵(未图示)、以及将先导泵的排出压保持为恒定(4mpa)来生成先导一次压的先导溢流阀(未图示)构成,先导液压源23的压力(先导一次压)被供给至液压泵21的调节器24和锁止阀25,并经由锁止阀25进一步供给到操作杆装置16、17、18的先导阀。
58.泵调节器24具备对来自先导液压源23的先导一次压进行减压的电磁比例阀即泵流量控制阀(未图示),泵流量控制阀根据车体控制器13输出的指令电流(ma)对先导一次压进行减压,生成泵流量控制压。另外,泵调节器24内置有液压泵21的倾转(排油容积)控制机构,根据泵流量控制阀生成的泵流量控制压来控制液压泵21的排油容积即容量,从而控制
液压泵21的排出流量。
59.泵调节器24的泵流量控制阀在非控制时(0ma)为切断位置(0mpa),并具有随着车体控制器13使指令电流增加而泵流量控制压增加的特性。泵调节器24包含第一液压泵21a的调节器24a和第二液压泵21b的调节器24b。
60.在旋转操作杆装置16与控制阀22之间的先导油路上设置有用于检测先导阀二次压(以下称为操作压)的旋转操作压传感器26。在行驶操作杆装置17与控制阀22之间的先导油路上设置有用于检测先导阀的二次压(以下称为操作压)的行驶操作压传感器27。在前操作杆装置18与控制阀22之间的先导油路上设置有用于检测先导阀的二次压(以下称为操作压)的前操作压传感器28。虽然省略图示,但行驶操作压传感器27中包含左行驶操作压传感器27a和右行驶操作压传感器27b,前操作压传感器28中包含动臂操作压传感器28a、斗杆操作压传感器28b、铲斗操作压传感器28c。
61.旋转操作压传感器26、行驶操作压传感器27(即左行驶操作压传感器27a、右行驶操作压传感器27b)、前操作压传感器28(即动臂操作压传感器28a、斗杆操作压传感器28b、铲斗操作压传感器28c)的检测信号被输入到车体控制器13,车体控制器13掌握液压挖掘机的操作状况。
62.在液压泵21与控制阀22之间的液压油供给路径上设置有用于检测液压泵21的排出压的泵排出压传感器29。泵排出压传感器29的检测信号被输入到车体控制器13,车体控制器13掌握液压泵21的负荷。泵排出压传感器29包含第一液压泵21a的泵排出压传感器29a和第二液压泵21b的泵排出压传感器29b。
63.在液压泵21的吸入端口与油箱之间的油路上设置有检测工作油温度的工作油温传感器32b。
64.车体控制器13和发动机控制器20通过can通信连接,分别进行所需信息的发送接收。
65.关于发动机转速控制,发动机控制器20将上述消声过滤器再生控制标志和水温传感器32a的传感器值(水温传感器值)发送给车体控制器13。车体控制器13输入从发动机控制器20发送的消声过滤器再生控制标志和水温传感器值、工作油温传感器32b的传感器值(油温传感器值)、3d传感器5、6、7、8的检测信号(障碍物检测状态)、发动机控制刻度盘的指令电压值、旋转操作压传感器26、行驶操作压传感器27以及前操作压传感器28的传感器值(操作杆装置16、17、18的操作状态),基于这些值/状态计算目标发动机转速(后述的2次目标发动机转速v4),并将计算出的该目标发动机转速(后述的2次目标发动机转速v4)发送到发动机控制器20。发动机控制器20根据拾取传感器的信号运算发动机实际转速,控制燃料喷射阀等使得发动机实际转速与目标发动机转速相等,由此控制发动机19的转速、输出转矩。
66.液压挖掘机的驾驶室4内具备周围检测监视器30以及警告蜂鸣器31,其用于向操作员通知基于3d传感器5、6、7、8的检测信号得到的车体周围的检测信息、基于该检测信息的车体动作的限制状态。
67.3d传感器5、6、7、8和周围检测监视器30和车体控制器13通过can通信连接,分别进行所需信息的发送接收。通过该can通信,车体控制器13和周围检测监视器30能够知晓在各个检测区域9、10、11、12中是否检测到障碍物。并且,车体控制器13在由3d传感器5、6、7、8生
成的检测区域9、10、11、12中的1个以上的区域内存在障碍物(人或物体)的情况下,判定为检测到障碍物,在全部的检测区域内没有障碍物(人或物体)的情况下,判定为未检测到障碍物。
68.《动作限制系统的特征》
69.将本实施方式的动作限制系统的特征概括如下。
70.在本实施方式中,车体控制器13是在障碍物检测装置(3d传感器5、6、7、8)检测到障碍物时,进行对车体动作进行限制的动作限制控制的控制装置。另外,车体控制器13在车体未要求使发动机19转速上升的发动机转速上升控制,且障碍物检测装置(3d传感器5、6、7、8)未检测到障碍物时,通过进行使发动机19转速降低的控制来进行车体的动作限制控制,在车体要求了发动机转速上升控制,且障碍物检测装置(3d传感器5、6、7、8)检测到障碍物时,进行使从液压泵21向多个液压致动器1c~3f供给的液压油的流量减少的供给流量减少控制,由此进行车体的动作限制控制。
71.在此,上述“车体未要求使发动机19转速上升的发动机转速上升控制”相当于后述的图7的步骤s12、s14、s16的判定结果为“否”,上述“车体要求了发动机转速上升控制”相当于图7的步骤s12、s14、s16的判定结果为“是”。换言之,上述“车体未要求使发动机19转速上升的发动机转速上升控制”是指水温预热控制、工作油预热控制、消声过滤器再生控制均未要求发动机转速上升控制的情况,上述“车体要求了发动机转速上升控制”是指水温预热控制、工作油预热控制、消声过滤器再生控制中的任一个控制要求了发动机转速上升控制的情况。
72.工程机械还具备产生警告音的警报装置(警告蜂鸣器31),车体控制器13在进行上述供给流量减少控制的同时使警报装置(警告蜂鸣器31)工作来产生警告音。
73.上述发动机转速上升控制是使在发动机19内循环的冷却水的温度上升的水温预热控制、使从液压泵21向多个液压致动器1c~3f供给的液压油即工作油的温度上升的工作油预热控制、使发动机19的废气温度上升来使废气后处理装置51的过滤器再生的废气升温控制中的至少1个。
74.上述供给流量减少控制是使液压泵21的目标容积减少来使液压泵21的排出流量减少的控制。
75.以下进行详细说明。
76.《车体控制器13》
77.图4是表示本实施方式的车体控制器13的处理内容的框图。
78.作为在检测到障碍物时限制车体动作的控制功能,车体控制器13具有检测判定部37、发动机转速电压值运算部38、发动机旋转控制部39、泵流量控制部40、泵流量修正运算部41、周围检测监视器/警告蜂鸣器控制部42。
79.检测判定部37基于从3d传感器5~8发送的检测信号来判定在检测区域9~12内是否检测到障碍物,将判定结果作为障碍物检测状态v1输出。
80.发动机转速电压值运算部38基于来自发动机控制刻度盘15的指令电压值ve和来自检测判定部37的障碍物检测状态v1,计算发动机转速指令电压值v2。
81.发动机旋转控制部39输入由发动机转速电压值运算部38计算出的发动机转速指令电压值v2、从发动机控制器20发送的消声过滤器再生控制标志ff以及水温传感器32a的
传感器值即水温传感器值tw、工作油温传感器32b的传感器值即工作油温传感器值to,基于这些状态量计算1次目标发动机转速v3和2次目标发动机转速v4。
82.泵流量控制部40输入旋转操作压传感器26、行驶操作压传感器27以及前操作压传感器28的传感器值即操作压pp1~pp6(参照图8)、泵排出压传感器29的传感器值即泵排出压pd1、pd2(参照图8),计算泵目标容积vp1、vp2。
83.泵流量修正运算部41输入1次目标发动机转速v3和2次目标发动机转速v4、泵目标容积vp1、vp2,基于1次目标发动机转速v3和2次目标发动机转速v4对泵目标容积vp1、vp2进行修正,将修正后的泵目标容积的指令电流vps1、vps2输出到液压泵21a、21b的调节器24a、24b。
84.周围检测监视器/警告蜂鸣器控制部42输入1次目标发动机转速v3和2次目标发动机转速v4、以及来自检测判定部37的障碍物检测状态v1,向周围检测监视器30和警告蜂鸣器31分别输出画面显示指令和警告音通知指令。
85.另外,发动机旋转控制部39将2次目标发动机转速v4输出给发动机控制器13。
86.以下,对各部的处理进行具体说明。
87.《检测判定部37》
88.图5是表示检测判定部37的处理内容的流程图。
89.在图5中,检测判定部37首先基于从3d传感器5发送的检测信号,判定在检测区域9中是否检测到物体(人或物体)(步骤s1)。如果在检测区域9中检测到物体,则判定为检测到障碍物的状态,将作为变量的障碍物检测状态v1设为“检测到”(步骤s6)。
90.如果在检测区域9中没有检测到物体,则判定在从3d传感器6发送的检测区域10中是否检测到物体(步骤s2)。如果在检测区域10中检测到物体,则判定为检测到障碍物的状态,将作为变量的障碍物检测状态v1设为“检测到”(步骤s6)。
91.如果在检测区域10中没有检测到物体,则判定在从3d传感器7发送的检测区域11中是否检测到物体(步骤s3)。如果在检测区域11中检测到物体,则判定为检测到障碍物的状态,将作为变量的障碍物检测状态v1设为“检测到”(步骤s6)。
92.如果在检测区域11中没有检测到物体,则判定在从3d传感器8发送的检测区域12中是否检测到物体(步骤s4)。如果在检测区域12中检测到物体,则判定为检测到障碍物的状态,将作为变量的障碍物检测状态v1设为“检测到”(步骤s6)。
93.如果在全部的检测区域9、10、11、12中没有检测到物体,则判定为未检测到障碍物的状态,将作为变量的障碍物检测状态v1设为“未检测到”(步骤s5)。
94.《发动机转速电压值运算部38》
95.图6是表示发动机转速电压值运算部38的处理内容的流程图。
96.在图6中,发动机转速电压值运算部38判定从检测判定部37输入的障碍物检测状态v1是否是“检测到”的状态(步骤s7),如果障碍物检测状态v1为“检测到”的状态,则将预先设定的用于动作限制控制(发动机转速限制控制)的发动机转速指令电压值v0作为发动机旋转指令电压值v2输出到发动机旋转控制部39(步骤s8),如果是“未检测到”的状态,则将发动机控制刻度盘15的指令电压值ve作为发动机旋转指令电压值v2输出到发动机旋转控制部39(步骤s9)。
97.《发动机旋转控制部39》
98.发动机旋转控制部39计算用于基于来自发动机控制刻度盘15的指令电压值ve进行发动机19的转速控制的目标发动机转速、用于基于车体的要求进行发动机19的转速上升控制的目标发动机转速、用于基于障碍物检测状态进行发动机19的转速限制控制(转速降低控制)的目标发动机转速。
99.发动机19的转速上升控制具有:使废气温度上升来使废气过滤器中滞留的烟灰燃烧从而将其去除的消声过滤器再生控制、使散热器的冷却水温度上升的水温预热控制、使工作油温度上升的工作油温度预热控制。
100.在消声过滤器再生控制中,发动机旋转控制部39在从发动机控制器20发送了在消声过滤器的前后压差超过阈值时设定的消声过滤器再生控制标志ff时,通过向发动机控制器20发出用于使消声过滤器的排气温度上升的发动机转速指令来使发动机转速上升,使滞留在消声过滤器的烟尘燃烧从而将其除去。
101.在水温预热控制中,发动机旋转控制部39在从发动机控制器20发送的水温传感器值tw小于预定值时,向发动机控制器20发出用于使水温上升的发动机转速指令,由此使发动机转速上升。
102.在工作油温预热控制中,发动机旋转控制部39在工作油温传感器32b的工作油温传感器值to小于预定值时,向发动机控制器20发出用于使工作油温上升的发动机转速指令,由此使发动机转速上升。
103.图7是表示发动机旋转控制部39的处理内容的流程图。
104.在图7中,发动机旋转控制部39将从发动机转速电压值运算部38输出的发动机旋转指令电压值v2转换为目标发动机转速vw0(步骤s10),将该目标发动机转速vw0作为1次目标发动机转速v3输出到泵流量修正运算部41和周围检测监视器/警告蜂鸣器控制部42(步骤s11)。
105.在此,发动机旋转指令电压值v2与目标发动机转速vw0的关系成为如下关系:在电压值为1v时发动机转速为800rpm,在电压值为4v时发动机转速为1800rpm。
106.接着,判定输入的水温传感器值tw是否小于阈值ct1(例如25℃)(步骤s12),如果是,则将用于发动机19的转速上升控制的发动机转速设定值cw0(例如2000rpm)作为2次目标发动机转速v4,输出到泵流量修正运算部41、周围检测监视器/警告蜂鸣器控制部42以及发动机控制器13(步骤s13),如果是“否”,则进入下一步骤。接着,判定工作油温传感器的传感器值to是否小于阈值ct2(例如0℃)(步骤s14),如果是,则将用于发动机19的转速上升控制的发动机转速设定值cw0作为2次目标发动机转速v4输出(步骤s13),如果为“否”则进入下一步骤。接着,判定是否从发动机控制器20发送了消声过滤器再生控制标志ff(步骤s16),如果是,则将用于发动机19的转速上升控制的发动机转速设定值cw0作为2次目标发动机转速v4输出(步骤s13),如果为“否”,则在步骤s10中,将从发动机旋转指令电压值v2变换后的目标发动机转速v0作为2次目标发动机转速v4输出到泵流量修正运算部41、周围检测监视器/警告蜂鸣器控制部42以及发动机控制器13(步骤s18)。
107.《泵流量控制部40》
108.图8是表示泵流量控制部40的处理内容的功能框图。
109.在图8中,作为用于计算第一以及第二液压泵21a、21b的泵目标容积vp1、vp2的控制功能,泵流量控制部40具有第一目标泵容积运算部40a、40b、40c、40d以及第一最大值选
择部40e、第二目标泵容积运算部40f、40g、40h、40i以及第二最大值选择部40j、平均排出压运算部40k以及泵容积上限值运算部40l、第一以及第二最小值选择部40m、40n。
110.第一目标泵容积运算部40a、40b、40c、40d根据由操作压传感器27、28检测出并输入到泵流量控制部40的动臂操作压pp1、斗杆操作压pp2、铲斗操作压pp3、行驶右操作压pp4来运算各个目标容积,第一最大值选择部40e选择运算出的目标容积的最大值作为第一液压泵21a的基本目标容积vpmax1。
111.同样地,第二目标泵容积运算部40f、40g、40h、40i根据由操作压传感器26、27、28检测出并输入到泵流量控制部40的动臂操作压pp1、斗杆操作压pp2、旋转操作压pp5、行驶左操作压pp6来运算各个目标容积,第二最大值选择部40j选择运算出的目标容积的最大值来作为第二液压泵21b的基本目标容积vpmax2。
112.平均排出压运算部40k将泵排出压传感器29a、29b检测出并输入到泵流量控制部40的泵排出压pd1与泵排出压pd2相加而得到的值除以2来计算平均排出压,泵容积上限值运算部40l使计算出的平均排出压参照液压泵21a、21b的预先设定的用于转矩限制控制的最大转矩特性,从而计算液压泵21a、21b的容积上限值vplimit。
113.第一最小值选择部40m选择第一液压泵21a的基本目标容积vpmax1和容积上限值vplimit中的小的一方的值,生成第一液压泵21a的泵目标容积vp1。第二最小值选择部40n选择第二液压泵21b的基本目标容积vpmax2和容积上限值vplimit中的小的一方的值,生成第二液压泵21b的泵目标容积vp2。
114.《泵流量修正运算部41》
115.泵流量修正运算部41在发动机旋转控制部39中计算出的2次目标发动机转速v4为用于发动机19的转速上升控制的发动机转速设定值cw0时,进行修正泵目标容积vp1、vp2来使液压泵21a、21b的排油容积(排出流量)降低的控制。
116.图9是表示泵流量修正运算部41的处理内容的功能框图。
117.在图9中,泵流量修正运算部41具有除法部40p、乘法部40q、调节器指令值运算部40s。
118.除法部40p将在发动机旋转控制部39中计算出的1次目标发动机转速v3除以2次目标发动机转速v4,来计算想要降低的发动机转速的比率α(v3/v4)。
119.乘法部40q对在泵流量控制部40中计算出的泵目标容积vp1、vp2乘以该比率α来计算修正泵目标容积vpr1、vpr2,在2次目标发动机转速v4为用于发动机19的转速上升控制的发动机转速设定值cw0时,进行修正使得泵目标容积vp1、vp2以该比率α降低。
120.调节器指令值运算部40s将修正泵目标容积vpr1、vpr2转换为针对液压泵21a、21b的调节器24a、24b的指令电流vps1、vps2并输出。
121.由此,在2次目标发动机转速v4为用于发动机19的转速上升控制的发动机转速设定值cw0时,以想要使发动机转速降低的量(比率α)来降低液压泵21a、21b的排油容积(排出流量),由此能够降低液压致动器(行驶马达1c、1d、旋转马达2a、动臂液压缸3d、斗杆液压缸3e、铲斗液压缸3f)的驱动速度,能够一边进行发动机19的转速上升控制(不降低发动机转速)一边进行车体的动作限制。
122.《周围检测监视器/警告蜂鸣器控制部42》
123.图10是表示周围检测监视器/警告蜂鸣器控制部42的处理内容的流程图。
124.在图10中,周围检测监视器/警告蜂鸣器控制部42首先判定从检测判定部37输入给周围检测监视器/警告蜂鸣器控制部42的障碍物检测状态v1是否为“检测到”(步骤s19),如果不是“检测到”则向周围检测监视器30和警告蜂鸣器31发送指令,使得不对周围检测监视器30和警告蜂鸣器31进行通知(不使周围检测监视器30的画面显示部进行警告显示,不使警告蜂鸣器31发出警告音)(步骤s20)。接着,周围检测监视器/警告蜂鸣器控制部42取得从发动机旋转控制部39输入的1次目标发动机转速v3与2次目标发动机转速v4的差值δv(=v4-v3),进行该差值δv是否大于阈值cδw(例如10rpm)的比较(步骤s21)。阈值cδw为是否能够将1次目标发动机转速v3与2次目标发动机转速v4视为相同值的判定值。若差值δv为阈值cδw以下,则2次目标发动机转速v4不是用于发动机19的转速上升控制的发动机转速设定值cw0,而是正在进行发动机19的转速降低控制,因此在周围检测监视器30的画面显示部显示“障碍物检测中”且“发动机旋转限制中”(步骤s22)。若差值δv大于cδw,则2次目标发动机转速v4为用于发动机19的转速上升控制的发动机转速设定值cw0,是通过液压泵21a、21b的流量减少控制进行的车体的动作限制控制,因此在周围检测监视器30的画面显示部显示“障碍物检测中”且“泵容积限制中”(步骤s24),向警告蜂鸣器31输出指令使其发出警告音(步骤s25)。
125.《效果》
126.根据本实施方式,车体控制器13(控制装置)在作为障碍物检测装置的3d传感器5~8检测到障碍物,并且进行发动机转速上升控制时,通过进行使从液压泵21向多个液压致动器1c~3f供给的液压油的流量减少的供给流量减少控制来进行车体的动作限制控制,因此能够不损害发动机转速上升控制地进行动作限制控制,能够兼顾限制车体动作的控制和使发动机转速上升的控制。因此,即使在进行发动机转速上升控制时,也能够避免车体接近周围的障碍物。
127.另外,车体控制器13(控制装置)在作为障碍物检测装置的3d传感器5~8检测到障碍物,且不进行发动机转速上升控制时,通过进行使发动机19的转速降低的控制来进行动作限制控制,因此操作员根据发动机声音的变化能够知晓是检测到障碍物的状态,能够避免车体接近周围的障碍物,能够安全地进行作业。
128.并且,车体控制器13(控制装置)在作为障碍物检测装置的3d传感器5~8检测到障碍物,且进行发动机转速上升控制时,通过进行供给流量减少控制来进行车体动作限制控制,同时使警报装置(警告蜂鸣器31)动作来产生警告音。由此,即使在通过进行供给流量减少控制来进行车体动作限制控制的情况下,与通过进行使发动机19转速降低的控制来进行动作限制控制的情况同样地,操作员根据声音的变化(警告音的产生)能够知晓是检测到障碍物的状态,此时,操作员能够避免车体接近周围的障碍物,能够安全地进行作业。
129.《第二实施方式》
130.对本发明的第二实施方式进行说明。
131.本实施方式的系统结构在以下方面与第一实施方式不同。
132.在本实施方式中,在通过供给流量减少控制进行车体的动作限制控制的情况下,并非通过使液压泵21的排出流量减少的控制来进行供给流量减少控制,而是通过对控制阀22所具备的多个方向控制阀的动作进行限制的控制来进行供给流量减少控制。
133.以下进行详细说明。
134.图11表示本发明的第二实施方式的工程机械的系统结构。
135.在图11中,在旋转操作杆装置16与控制阀22之间的先导油路上设置有旋转操作压限制电磁阀33来作为进行旋转动作限制的手段之。旋转操作压控制电磁阀33在非控制时(0ma)为连通状态,通过车体控制器13a输出的指令电流变大来对操作压进行减压(限制),从而限制旋转动作。
136.另外,在行驶操作杆装置17与控制阀22之间的先导油路上设置有行驶操作压限制电磁阀34,来作为进行行驶动作限制的手段之一。行驶操作压限制电磁阀34在非控制时(0ma)为连通状态,通过车体控制器13a输出的指令电流变大来对操作压进行减压(限制),从而限制行驶动作。行驶操作压限制电磁阀34包含左行驶操作压的限制电磁阀34a和右行驶操作压的限制电磁阀34b。
137.并且,在前操作杆装置18与控制阀22之间的先导油路上设置有前操作压限制电磁阀35,来作为进行前作业机3的动作限制的手段之一。前操作压限制电磁阀35在非控制时(0ma)为连通状态,通过车体控制器13a输出的指令电流变大来对操作压进行减压(限制),从而限制前动作。前操作压限制电磁阀35包含动臂操作压的限制电磁阀35a、斗杆操作压的限制电磁阀35b、以及铲斗操作压的限制电磁阀35c。
138.图12是一框图,其表示第二实施方式的车体控制器13a在检测到障碍物时的车体动作限制所涉及的控制功能。
139.在图12中,车体控制器13a直到发动机旋转控制部39输出1次目标发动机转速v3和2次目标发动机转速v4为止,与第一实施方式的图4所示的控制功能相同。车体控制器13a与第一实施方式的不同点在于,具备操作压限制控制部43来代替泵流量修正运算部41,1次目标发动机转速v3和2次目标发动机转速v4不输入到泵流量修正运算部41,而输入到操作压限制控制部43,向操作压的限制电磁阀33、34、35输出指令电流。
140.图13是表示操作压限制控制部43的处理内容的流程图。
141.在图13中,操作压限制控制部43首先取得1次目标发动机转速v3与2次目标发动机转速v4的差值δv(=v4-v3),进行该差值δv是否大于阈值cδw(例如10rpm)的比较(步骤s30)。若差值δv大于阈值cδw,则视为2次目标发动机转速v4为用于发动机19的转速上升控制的发动机转速设定值cw0(为发动机19的转速上升控制中),向旋转操作压限制电磁阀33、行驶操作压限制电磁阀34以及前操作压限制电磁阀35输出i[ma]的操作压限制的指令电流(限制指令电流)vr1、vr2、vr3(步骤s31)。此时,将限制指令电流vr1、vr2、vr3设为与在障碍物检测中降低发动机转速来限制液压致动器的动作时的动作速度相等那样的值的大小的电流。若差值δv为阈值cδw以下,则视为2次目标发动机转速v4不是用于发动机19的转速上升控制的发动机转速设定值cw0(不是发动机19的转速上升控制中),向旋转操作压限制电磁阀33、行驶操作压限制电磁阀34以及前操作压限制电磁阀35输出0[ma]的指令电流vr1、vr2、vr3(步骤s32)。
[0142]
《效果》
[0143]
根据本实施方式,在通过供给流量减少控制进行车体的动作限制控制的情况下,不是通过使液压泵21的排出流量减少的控制,而是通过对控制阀22所具备的多个方向控制阀的动作进行限制的控制来进行供给流量减少控制,由此能够得到与第一实施方式同等的效果。
[0144]
《第三实施方式》
[0145]
对本发明的第三实施方式进行说明。
[0146]
图14表示本发明的第三实施方式的工程机械的系统结构。
[0147]
本实施方式的系统结构在以下方面与第一及第二实施方式不同。
[0148]
在第一和第二实施方式中,进行动作限制控制和发动机转速上升控制的控制装置是车体控制器13或13a,与此相对,本实施方式中,该控制装置包含车体控制器13b和与车体控制器13b分开设置的动作限制控制器44,车体控制器13b进行基于发动机控制刻度盘15的指示来设定发动机19的转速的控制和发动机转速上升控制,动作限制控制器44进行动作限制控制。
[0149]
以下进行详细说明。
[0150]
在图14中,本实施方式的工程机械(液压挖掘机)具备与车体控制器13b分开设置的动作限制控制器44。
[0151]
动作限制控制器44通过can通信与车体控制器13b连接。动作限制控制器44通过can通信向车体控制器13b输出相当于发动机控制电压的发动机旋转指令电压vf,从车体控制器13b向动作限制控制器44输入根据发动机旋转指令vf和发动机转速上升控制的转速而决定的、作为向发动机控制器20的转速指令值的目标发动机转速vw1。
[0152]
另外,发动机控制刻度盘15与动作限制控制器44连接,动作限制控制器44直接输入发动机控制刻度盘15的电压值ve。并且,动作限制控制器44通过can通信向控制器13b输出基于所输入的电压值ve决定的发动机旋转指令电压vf。另外,动作限制控制器44通过can通信还与作为障碍物检测装置的3d传感器5~8、周围检测监视器30以及警告蜂鸣器31连接,输入障碍物检测状态来输出警告通知指令。另外,动作限制控制器44与对操作杆装置16、17、18生成的操作压进行限制从而对油压致动器1c~3f的动作进行限制的操作压限制电磁阀33、34、35连接,与第二实施方式同样地将操作压限制的指令电流vr1、vr2、vr3输出至操作压限制电磁阀33、34、35。
[0153]
图15是表示车体控制器13b的处理内容中的与发动机转速指令值相关的部分的流程图。
[0154]
在图15中,车体控制器13b判定输入的水温传感器值tw是否小于闘值ct1(例如25℃)(步骤s40),如果水温传感器值tw小于関值ct1,则将用于发动机19的转速上升控制的发动机转速设定值cw0(例如2000rpm)设为目标发动机转速vw1,输出到发动机控制器20和动作限制控制器44(步骤s41),如果水温传感器值tw为闘值ct1以上,则进入下一步骤。接着,车体控制器13b判定工作油温传感器值to是否小于関值ct2(例如0℃)(步骤s42),若工作油温传感器值to小于闘值ct2,则将用于发动机19的转速上升控制的发动机转速设定值cw0作为目标发动机转速vw1输出至发动机控制器20以及动作限制控制器44(步骤s41),若工作油温传感器值to为闇值ct2以上,则进入下一步骤。接着,车体控制器13b判定是否从发动机控制器20发送了消声过滤器再生控制标志ff(步骤s43),如果从发动机控制器20发送了消声过滤器再生标志ff,则将用于发动机19的转速上升控制的发动机转速设定值cw0作为目标发动机转速vw1,输出到发动机控制器20和动作限制控制器44(步骤s41)。若未从发动机控制器20发送消声过滤器再生标志ff,则在步骤s44中从动作限制控制器44输入发动机旋转指令电压vf,车体控制器13b将该输入的发动机旋转指令电压vf转换为发动机转速vw2,并
将转换后的发动机转速vw2作为目标发动机转速vw1向发动机控制器20及动作限制控制器44输出(步骤s45)。
[0155]
图16是表示动作限制控制器44的处理内容的流程图。
[0156]
在图16中,动作限制控制器44首先判定是否检测到障碍物(步骤s46),如果检测到障碍物,则进入步骤s48,如果没有检测到,则进入步骤s47。在步骤s48中,将预先设定的用于动作限制控制(发动机转速限制控制)的指令电压值v0作为发动机旋转指令电压vf输出到车体控制器13b,进入步骤s49。在步骤s49中,将发动机旋转指令电压vf转换为目标发动机转速vw0,进入步骤s50。在步骤s50中,从车体控制器13b取得目标发动机转速vw1,进入步骤s51。在步骤s51中,取目标发动机转速vw0与目标发动机转速vw1的差值δv(vw1-vw0),进行该差值δv是否大于関值cδw(例如10rpm)的比较,如果大则进入步骤s52,如果小则进入步骤s55。在步骤s52中,向旋转操作压限制电磁阀33、行驶操作压限制电磁阀34以及前操作压限制电磁阀35输出i[ma]的操作压限制的指令电流vr1、vr2、vr3。在接下来的步骤s53中,向周围检测监视器30的画面显示部输出显示“障碍物检测中”且“先导压限制中”的指令,并且向警告蜂鸣器31输出指令使其发出警告音(步骤s54)。在步骤s55中,向旋转操作压限制电磁阀33、行驶操作压限制电磁阀34以及前操作压限制电磁阀35输出0[ma]的操作压限制的指令电流vr1、vr2、vr3。然后,向周围检测监视器30的画面显示部输出显示“障碍物检测中”且“发动机旋转限制中”的指令。
[0157]
在步骤s47中,将发动机控制刻度盘15的电压值ve作为发动机旋转指令电压vf向车体控制器13b输出,进入步骤s57。在步骤s57中,将0[ma]的操作压限制的指令电流vr1、vr2、vr3输出到旋转操作压限制电磁阀33、行驶操作压限制电磁阀34以及前操作压限制电磁阀35,并且在步骤s58中,向周围检测监视器30和警告蜂鸣器31输出指令,使得不对周围检测监视器30以及警告蜂鸣器31进行通知。
[0158]
《效果》
[0159]
根据第三实施方式,也能够得到与第一实施方式同等的效果。
[0160]
另外,根据第三实施方式,构成为将动作限制控制器44与车体控制器13b分开设置,使车体控制器13b基于发动机控制刻度盘15的指示进行发动机转速控制以及进行发动机转速上升控制,因此无需对现有的发动机控制系统施加变更而能够追加动作限制控制功能。
[0161]
另外,在第三实施方式中,通过对多个方向控制阀的动作进行限制来进行用于车体动作限制的供给流量减少控制,但也可以与第一实施方式同样地,通过减少液压泵21的目标容积来减少液压泵21的排出流量,由此进行供给流量减少控制。
[0162]
附图标记的说明
[0163]
1 下部行驶体
[0164]
1c,1d 行驶马达(液压致动器)
[0165]
2 上部旋转体
[0166]
2a 旋转马达(液压致动器)
[0167]
3 前作业机
[0168]
3d 动臂液压缸(液压致动器)
[0169]
3e 斗杆液压缸(液压致动器)
[0170]
3f 铲斗液压缸(液压致动器)
[0171]
4 驾驶室
[0172]
5-8 3d传感器(障碍物检测装置)
[0173]
9-12 检测区域
[0174]
13,13a,13b 车体控制器(控制装置)
[0175]
14 锁定开关
[0176]
15 发动机控制刻度盘
[0177]
16 旋转操作杆装置
[0178]
17 行驶操作杆装置
[0179]
18 前操作杆装置
[0180]
19 发动机
[0181]
20 发动机控制器
[0182]
21,21a,21b 液压泵
[0183]
22 控制阀(换向阀)
[0184]
23 液压源
[0185]
24,24a,24b 泵调节器
[0186]
25 锁止阀
[0187]
26 旋转操作压传感器
[0188]
27 行驶操作压传感器
[0189]
27a 左行驶操作压传感器
[0190]
27b 右行驶操作压传感器
[0191]
28 前操作压传感器
[0192]
28a 动臂操作压传感器
[0193]
28b 斗杆操作压传感器
[0194]
28c 铲斗操作压传感器
[0195]
29,29a,29b 泵排出压传感器
[0196]
30 周围检测监视器
[0197]
31 警告蜂鸣器
[0198]
32a 水温传感器
[0199]
32b 工作油温传感器
[0200]
33 旋转操作压限制电磁阀
[0201]
34 行驶操作压限制电磁阀
[0202]
34a 左行驶操作压的限制电磁阀
[0203]
34b 右行驶操作压的限制电磁阀
[0204]
35 前操作压限制电磁阀
[0205]
35a 动臂操作压的限制电磁阀
[0206]
35b 斗杆操作压的限制电磁阀
[0207]
35c 铲斗操作压的限制电磁阀
[0208]
37 检测判定部
[0209]
38 发动机转速电压值运算部
[0210]
39 发动机旋转控制部
[0211]
40 泵流量控制部
[0212]
41 泵流量修正运算部
[0213]
42 周围检测监视器/警告蜂鸣器控制部
[0214]
43 操作压限制控制部
[0215]
44 动作限制控制器(控制装置)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1