用于运土设备的基于电激活聚合物的动力锁定装置的制作方法
1.本发明涉及一种运土设备和机械,具体涉及例如齿在这样的运土机械上的保持。特别地,本发明涉及这种齿中的新的动力操作锁定系统,其电动或电子地操作以在锁定位置和解锁位置之间移动单独的锁定机构。根据本发明的锁定系统完全隐藏在运土机械的部件内,例如齿安装件(也可称为适配器)和齿本身,使得锁定系统不暴露在使用机械的环境中。
背景技术:
2.许多机器,特别是运土机器,包括用于执行诸如挖掘、耕地掘进、装载和/或挖掘任务等任务的地面接合工具。这种地面接合工具通常包括具有一个或多个唇部的铲或铲子,所述唇部上具有边缘。如果这样的唇部不受保护,则与土壤、岩石和其它材料的接触可能损坏或磨损唇部的边缘。由于边缘的磨损或损坏,修理或更换这种地面接合工具的唇部可能涉及相当大的费用。因此,许多地面接合工具包括地面接合构件,例如齿、适配器和护罩,它们安装在唇部上,以保护唇部的边缘不与土壤、岩石和其它材料接触。
3.在大多数情况下,这种齿和适配器通过某种形式的楔形装置固定到铲上。在许多情况下,这种楔形件通常通过简单的锤击手动地固定在适当位置。在其它情况下,开发了各种不同的锁或楔系统,其中通过某种形式的螺纹机构实现楔入。螺纹机构又用手或扳手操作。
4.可以理解,即使是用于将齿锁定在适配器上的更复杂的螺纹机构,仍必须从齿或适配器或两者的外部可接近。这被认为是问题的可能原因,因为交替地将铲移动到泥土或碎屑中然后再次将其移除的恶劣环境。齿和机构经受极端的磨损和力操作,首先将齿推开,然后将齿从适配器拉开,等等。
5.当必须更换齿时,则必须清理铲,以使移除机构可接近。在锁定机构由于使用而损坏的情况下,移除这样的锁定机构又成为问题。
6.因此,需要开发一种用于将齿锁定在适配器上的机构,该机构不易损坏或磨损。
技术实现要素:
7.提供了一种与根据本发明的实施例的动力锁定装置一起使用的适配器。适配器可包括限定纵向轴线和垂直于纵向轴线的横向轴线的本体。所述本体可包括引导部分,其限定至少部分地横向延伸穿过所述引导部分的锁接收凹部;以及电线导管,其与所述锁接收凹部连通。锁接收凹部可以限定宽度和深度,并且深度与宽度的比可以大于1.0。
8.根据本发明的实施例的动力锁定装置可包括本体,该本体包括盲孔和滑动锁定构件,该盲孔具有布置在盲孔中的电活性聚合物,该滑动锁定构件布置在盲孔中并接触电活性聚合物。电流源可以与电活性聚合物电连通。
9.提供了一种使用根据本发明的实施例的动力锁定装置将尖端附接到适配器和从适配器拆卸尖端的方法。该方法可以包括将具有中空内部的尖端插入到适配器的引导部分
上,直到动力锁定装置与尖端或适配器的孔口对准,并且使动力锁定装置的电活性聚合物膨胀或收缩,使得锁定构件移动到孔口中,将尖端保持在适配器上。
附图说明
10.图1是适配器、齿和锁定装置的分解图。
11.图2是对应于图1的视图,示出了分解的锁定装置。
12.图3是图2的锁定装置的放大分解图。
13.图4是单独示出的锁定装置的透视图。
14.图5是图4的锁定装置的端视图。
15.图6是图5的锁定装置沿其线6-6截取的截面图。
16.图7是图1沿其线7-7的截面图。
17.图8是在图7的圆8处截取的放大详图。
18.图9是本发明的各种实施例涉及的铲和遥控器的示意性透视图。
19.图10是示出根据本发明的实施例的用于使用动力锁定装置将尖端附接到适配器或从适配器拆卸尖端的方法的流程图。
20.图11是根据本发明的各种原理的锁定装置的另一实施例的截面图,该锁定装置被电动或电子地激活并且可以与尖端或适配器一起使用。
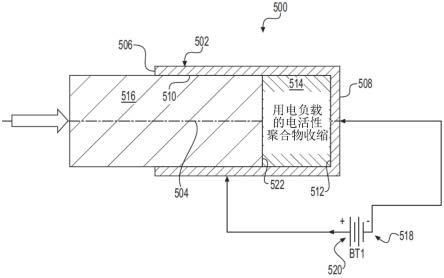
21.图12是具有电活性聚合物的锁定装置的又一实施例的示意图(至少部分截面视图),该电活性聚合物在电负载被施加到该聚合物上时收缩以便使该锁定装置的滑动锁定构件缩回,其还可以与根据本发明的不同原理的尖端或适配器一起使用。
22.图13是具有电活性聚合物的锁定装置的又一实施例的示意图(至少部分截面视图),该电活性聚合物在电负载被施加到该聚合物上时膨胀以便使该锁定装置的滑动锁定构件缩回,其还可以与根据本发明的不同原理的尖端或适配器一起使用。
具体实施方式
23.现在将详细参考本发明的实施例,其示例在附图中示出。在所有附图中,尽可能使用相同的附图标记来表示相同或相似的零件。在一些情况下,在本说明书中将指示附图标记,并且附图将显示附图标记,后面是字母例如100a、100b或诸如100’、100”等的主要指示符。应当理解,在附图标记之后立即使用字母或主要指示符表示这些特征具有类似的形状并且具有例如当几何结构关于对称平面成镜像时通常的情况类似的功能。为了在本说明书中容易解释,字母或主要指示符通常不包括在本文中,而是可以在附图中示出,以指示在本书面说明书中讨论的特征的重复。
24.如本文前面所提到的,本发明的各种实施例提供了用于运土机械等上的动力操作的锁。更具体地,这种机器可具有某种铲(100,见图9)或刮刀、铲斗、耙子、剪刀等。这种铲(100)的唇部(102)设置有齿(14)。为了固定齿(14),铲形唇部(102)将具有一系列安装构件。它们本身可以是可拆卸适配器(10),或者可以间隔地焊接到唇部(102)上。在铲(100)上可以有二十个这样的安装构件(例如适配器(10)),例如,数量取决于这样的铲(100)的尺寸和设计。这些安装构件通常采用可拆卸适配器(10)的形式。然后将齿(14)固定在适配器(10)上。在大多数情况下,适配器(10)和齿(14)通过某种锁或楔形件保持在铲(100)上。这
些典型的锁或楔形件至少部分地暴露于齿和适配器周围的外部环境。因此,在使用铲的过程中,当铲移动到泥土中时,以及例如当铲使泥土翻出时,这些锁和楔形件受到极大的磨损和应力。当齿或甚至适配器损坏或磨损时,必须更换它们。这包括移除楔形件,丢弃损坏的部件并用新的部件替换它。
25.在一些情况下,楔形件本身被损坏或难以移出。
26.在具体实施例中,例如可以有二十个单独的适配器(10),带有二十个单独的齿(14)。锁定装置可以是这样的,即它们将适配器(10)锁定在铲安装构件上,并且还将齿(14)锁定在适配器(10)上,但不是必须如此。
27.本发明的各种实施例可以包括用于这种目的的锁定装置(24),即,将齿(14)锁定到其适配器(10)上或将适配器(10)锁定到铲(100)上的工具安装件上,等等。每个锁定装置(24)可以隐藏在适配器(10)或齿(14)或工具安装件内,并且可以是自包含的、承载其自身的内部动力操作机构。
28.此外,齿(14)和适配器(10)可以形成有内部空腔或凹部。这些空腔之一可以被配置为用于将该锁定装置(24)接收在其中即接收在该适配器(10)或安装件的内部中。另一工具,适配器(10)或齿(14)本身,可以设置有内部插座,该内部插座可以配置为与形成在安装件或适配器(10)中的内腔对齐。通过无线远程技术,可以激活锁定装置(24),以便将适配器(10)锁定在安装件上,或将齿(14)锁定在适配器(10)上。锁定装置(24)本身可以保持完全隐藏在安装件或适配器(10)内,并且因此可以在使用中在环境中受到保护而免受损坏。
29.内部动力操作机构可以结合无线技术(例如蓝牙、wi-fi、射频、红外等),并且可以由无线遥控器激活。
30.图1示出了适配器(10),通常例如可以固定在铲(100)上的支撑构件上(如图9所示)。该适配器(10)是本身可从铲支撑构件移除并根据需要更换的类型。适配器(10)具有锁定凹部(12)以接收任何合适的锁(未示出),适配器(10)可通过该锁锁定在铲支撑构件上。这可能不是本发明的其他实施例的情况。
31.在这种情况下,适配器(10)被设计成支撑齿(14)。齿(14)可以具有中空内部(15),该中空内部配合在适配器(10)的引导部分(16)(即鼻部)上。
32.适配器的引导部分(16)可以具有本体,该本体在一侧上具有横向圆柱形锁接收凹部(18)(即,沿着横向轴线(13)延伸)。
33.此外,适配器本体可以具有纵向轴线(11),其垂直于横向轴线(13),在铲运动的方向上延伸。圆柱形锁接收凹部(18)可以位于垂直于纵向轴线(11)的轴线上(例如,沿着垂直于纵向轴线(11)的方向)。以此方式,该锁定装置(24)可以在该适配器(10)的纵向轴线(11)的横向方向上向外和向内延伸。
34.更靠近凹部(18)看,凹部(18)可具有带两个线性部分(21)的边缘(20)。
35.此外,齿(14)可具有中空体(15),中空体内具有内部隐藏的锁接收插座(42)。可以提供一种锁定装置(24),其被配置为配合在适配器(10)的锁接收凹部(18)内。
36.参见图2至图6,可以更清楚地看到根据本发明的实施例的锁定装置(24)。
37.该锁定装置(24)可以具有总体上圆柱形本体(26),限定中空内部(28)。可以提供在本体(26)的内部(28)内可滑动的部分圆柱形的滑动锁定构件(30)。锁定构件(30)附接到形成有齿轮齿的线性齿条(32)。可以提供与齿条(32)上的齿轮齿啮合的驱动齿轮(34)。齿
轮(34)可以由电动机(36)驱动。马达(36)由位于本体(26)的内部(28)内的电路和电池(38)控制和供电。
38.也可以根据需要在本体(26)上设置密封环(40)。
39.齿(14)可具有中空内部(15)(参见图7),其装配在适配器(10)的前端(16)上。齿(14)在齿(14)的中空内部的一侧形成有内部锁接收插座(42),并且从齿(14)的外部是不可接近的。当齿(14)配合在适配器(10)的前端(16)上时,插座(42)定位成与适配器(10)的锁接收凹部(18)对准并接收滑动锁定构件(30)。
40.同样,齿(14)中的插座(42)可以沿平行于齿(14)的横向轴线(13)的方向对准。因此,当齿(14)装配在适配器(10)上时,凹部(18)和插座(42)可以彼此对准并且横向于齿(14)和适配器(10)的纵向轴线(11)对准。
41.如图7和图8所示,小直径进入钻孔(44)可形成在适配器(10)和齿(14)中,彼此对准。钻孔(44)可与凹部(18)的内端连接,以使维修人员能够从齿(14)的外部到达锁定装置(24)。
42.另外,可以看出,锁定装置(24)完全或基本上隐藏在适配器(10)和齿(14)的本体内,并且不暴露在任何一个的外部。这样,锁定装置(24)的使用寿命大大延长,并且实际上其通过远程无线技术的操作能够更快地关注铲(100)上的齿(14)的维修。
43.在操作中,首先将锁定装置(24)插入适配器(10)的锁接收凹部(18)中,使其滑动锁定构件(30)缩回。
44.然后,齿(14)配合在适配器(10)的前端(16)上。该齿(14)在该适配器(10)上滑动直到该锁接收凹部(18)与该锁接收插座(42)对准并且与之对齐。此时,锁定装置(24)完全或基本上隐藏在适配器(10)和齿(14)的本体内并由其保护,并且基本上从适配器(10)或齿(14)的外部手动地无法接近。使用合适的远程无线装置(w)(见图9),然后激活马达(36)。齿轮(34)旋转并将锁定构件(30)移出本体(26)。该滑动锁定构件(30)将进入该齿(14)的锁接收插座(42),从而将该齿(14)锁定在该适配器(10)上的适当位置中。
45.为了移除齿(14),马达(36)随后被反向激活。这将使滑动锁定构件(30)从齿(14)中的锁接收插座(42)缩回回到本体(26)中。
46.现在,所述齿(14)可以从所述适配器(10)移除。
47.使用这种锁定装置(24)将适配器(10)锁定在其铲(100)上将涉及基本相同的操作。
48.应当理解,所描述的动力操作的锁能够将可拆卸的附件附接到运土机械上,无论这种可拆卸的装置是齿适配器,还是齿本身,还是某种其它性质。因此,在权利要求中提到了一种可释放的刀头,其目的是该措辞对于适配器和齿本身都是通用的。
49.可以相信,控制每个单独的齿锁所涉及的无线技术可以采用如本文前面所述的任何合适的形式。当然,应当理解,每个锁应当具有其自己的唯一信号。该设备的操作者将具有手持装置(w),该手持装置(w)能够发送为该设备上的特定工具锁编码的单独信号。
50.使用锁定装置的方法从以上描述是不言自明的。
51.因此,通过简单地操作手持装置(w),并且沿着横向于齿或适配器的轴线的轴线移动锁定构件,来实现将齿锁定在适配器上,或者将适配器锁定在铲的支撑件上。这是在不对齿或适配器进行锤击的情况下实现的,或者在试图操作螺纹锁定装置或楔形件的情况下实
现的,如在较早的铲中的情况。
52.虽然示出的锁接收凹部(18)在适配器(10)中,并且锁接收插座(42)在齿(14)中,但这种布置在一些情况下可以颠倒。
53.还应当理解,虽然已经广泛参考了地面接合系统和运土设备,但是本公开的实施例不必仅限于运土设备。例如,当清理建筑工地或从倒塌的建筑物中移除碎片时,仅给出几个示例,使用其它形式的动力操作铲子和提升装置。
54.工业实用性
55.实际上,机器、作业器具组件、适配器组件(例如,锁定装置和适配器)、尖端和适配器组件、锁定装置和/或这些各种组件和部件的任何组合可被制造、购买或销售以在售后市场环境中在现场改装机器或作业器具组件,或者可替换地,可在oem(原始设备制造商)环境中制造、购买、销售或以其他方式获得。
56.例如,适配器(或适配器组件)可以作为现场的替换部件或改型来提供。参见图1、图2、图7和图8,适配器(10)可以包括限定纵向轴线(11)和垂直于纵向轴线(11)的横向轴线(13)(例如,水平轴线、竖直轴线等)的本体(10’)。该本体(10’)可以包括引导部分(16)(也可以被称为鼻形部分),该引导部分限定至少部分地横向延伸穿过该引导部分(16)的锁接收凹部(18)。引导部分(16)可以在锁接收凹部(18)中限定至少一个线性部分(21),该线性部分配置为接合动力锁定装置(24)。
57.在特定实施例中,提供至少部分地限定锁接收凹部(18)的两个平行线性部分(21),所述两个平行线性部分彼此径向相对。这可能不是本发明的其他实施例的情况。
58.在图8中最佳示出的某些实施例中,锁接收凹部(18)包括沉孔(50)和头部接收部盲深(56),沉孔(50)限定头部接收部(52),头部接收部(52)限定头部接收部直径(54)。锁接收凹部(18)的后部(58)可限定小于头部接收部直径(54)的后部直径(60)(也可称为凹部最小直径(60’))。而且,后部(58)还可以限定大于头部接收部盲深(56)的后部盲深(62)。
59.适配器(10)还可以限定钻孔(44),钻孔(44)从锁接收凹部(18)横向延伸完全穿过引导部分(16),如图7最佳所示。钻孔(44)限定小于凹部最小直径(60’)或后部直径(60)的钻孔直径(64)。在本发明的其它实施例中可以省略这些特征。
60.可以提供一种动力锁定装置(24),该动力锁定装置具有至少部分地与该锁接收凹部(18)的沉孔(50)互补成形的外部配置。更具体地,动力锁定装置(24)可包括布置在锁接收凹部(18)的头部接收部(52)中的头部部分(66)和布置在锁接收凹部(18)的后部(58)中的圆柱体(18),该头部包括一对平坦表面(68)(也参见图5),该平坦表面配置为接合锁接收凹部(18)的线性部分(21)(也参见图1和图2)。在本发明的其它实施例中,动力锁定装置(24)的其它配置也是可能的。
61.参见图6,动力锁定装置(24)可包括滑动锁定构件(30),可操作地与滑动锁定构件(30)相关联的马达(36),以及可操作地与滑动锁定构件(30)和马达(36)相关联的电路和电池(38)。该滑动锁定构件(30)、马达(36)、电路/电池(38)可以被配置为经由如在此先前提及的无线技术来伸出和缩回该滑动锁定构件(30)。
62.现在,将讨论根据本发明的实施例的还可以提供为改型或替换的尖端和适配器组件。
63.从图1和图2开始,组件(200)可以包括适配器(10),该适配器(10)包括如上所述的
限定外部(70)的本体(10’),以及限定外部(72)和中空内部(15)的尖端(14’),该中空内部(15)被配置为配合在适配器(10)的引导部分(16)上。锁接收插座(42)可以从该中空内部(15)朝向该尖端(14’)的外部(72)横向地延伸。锁接收插座(42)可以限定锁接收插座盲深(74)。也就是说,锁接收插座(42)可以不直接延伸到尖端(14’)的外部(72)。在本发明的其他实施例中可能不是这种情况。
64.一旦组装,尖端(14’)的锁接收插座(42)与适配器(10)的锁接收凹部(18)对准(见图7和图8)。
65.参见图7和图8,锁接收凹部可以被配置为如在此刚刚描述的。此外,该适配器可以限定如在此刚刚描述的孔或钻孔。如图7所示,尖端(14’)可进一步限定与适配器(10)的钻孔(44)对准的尖端钻孔(76)。这个尖端钻孔(76)可以完全横向地延伸穿过尖端(14’)到达尖端(14’)的外部(72)。这可能不是本发明的其他实施例的情况。
66.组件(200)还可包括布置在适配器(10)的锁接收凹部(18)中的动力锁定装置(24)。
67.在图6中,动力锁定装置(24)可包括限定锁外部(76)和锁内部(28)的至少部分圆柱形本体(26)。头部部分(66)可限定从锁外部(76)延伸到锁内部(28)的孔口(78)。滑动锁定构件(30)可以被布置在该孔口(78)中,其被配置为至少部分地朝向该锁内部(28)并且至少部分地朝向该锁外部(76)横向移动。
68.动力锁定装置(24)可具有附接到滑动锁定构件(30)的齿条(32),齿条(32)至少部分地布置在锁内部(28)中;齿轮(34),其布置在锁内部(28)中,与齿条(32)啮合;马达(36);以及电路/电池(38),其布置在锁内部(28)中,其配置为控制齿轮(34)的旋转方向。
69.保持器(80)可以设置成围绕锁外部(76)布置的o形环的形式,该o形环配置为将动力锁定装置(24)保持在适配器(10)的锁接收凹部(18)中。其它形式的保持也是可能的,包括螺纹等。o形环也可防止碎屑通过尖端和适配器的钻孔渗入动力锁定装置的工作部分。
70.现在将参照图7、图8和图11讨论与动力锁定装置一起使用的适配器,该动力锁定装置是电动或电子控制或激活的。适配器(10、10a)可以包括限定纵向轴线(11)和垂直于纵向轴线(11)的横向轴线(13)的本体(10’、10”)。该本体(10a)可以包括一个引导部分(16),该引导部分限定至少部分地横向延伸穿过该引导部分(16)的锁接收凹部(18’)。锁接收凹部(18’)可以限定宽度(82)和深度(84),并且在本发明的某些实施例中,深度(84)与宽度(82)的比大于1.0。
71.锁接收凹部(18’)可以是限定底表面(84)的盲凹部。锁接收凹部(18’)可以具有圆柱形配置并且限定凹部最小直径(60”)和大于凹部最小直径(60”)的凹部深度(86)。
72.适配器(10、10a)还可以限定钻孔(44、44’),该钻孔从锁接收凹部(18’)横向延伸完全穿过引导部分(16)。钻孔(44、44’)可以限定小于凹部最小直径(60’、60”)的钻孔直径(64、64’)。缆线(88)(也可以是电线等)可以从锁定装置(24、24’)的后部延伸穿过钻孔(44、44’)并且延伸出十字孔(90),该十字孔(90)延伸穿过适配器(10、10a)并且延伸到诸如铲(100)的作业器具并且最终延伸到插头、按钮、开关等,使得动力锁定装置(24、24’)可被激活或停用以有意地锁定或解锁动力锁定装置(24、24’),而几乎不用担心由于碎屑、物体、人员等撞击控制动力锁定装置(24、24’)的操作的开关或按钮等而无意地解锁动力锁定装置(24、24’)。因此,可以提供一个或多个电线导管(46),其中布置电线或电缆以允许电动或电
子连接。在一些实施例中,可以设置插头,动力锁定装置在盲凹部的底部连接到该插头中,等等。类似的插头连接可以设置在适配器和铲或其它作业器具之间的接口处,等等。
73.动力锁定装置(24’)可以具有至少部分地与该锁接收凹部(18’)互补成形的外部配置。在图11中,动力锁定装置(24’)可包括具有外螺纹(94)的外圆柱形表面(92),所述外螺纹(94)互补地配置为与锁接收凹部(18’)的内螺纹(96)配合。
74.继续参照图11,动力锁定装置(24’)还包括滑动锁定构件(30’)、与滑动锁定构件(30’)可操作地相关联的马达(36’)、由马达(36’)提供动力的齿轮减速器(96),以及将齿轮减速器(96)连接到滑动锁定构件(30’)的导螺杆(98)。齿轮减速器(96)可减慢马达(36’)的高转速,以更慢和更高的扭矩转动导螺杆(98),为滑动锁定构件(30’)的平移提供动力。
75.更具体地,图11中的动力锁定装置可包括限定纵向轴线(402)的本体(400)、沿纵向轴线(402)布置的第一轴向端(404)、沿纵向轴线(402)布置的第二轴向端(405),以及从第一轴向端(404)延伸的盲孔(406),该盲孔包括布置在第二轴向端(406)附近的底表面(408)。马达(36’)可以被布置在该盲孔(406)中,并且齿轮减速器(96)可以被布置在该盲孔(406)中靠近该马达(36’)。导螺杆(98)可布置在连接到齿轮减速器(96)的盲孔(406)中,并且滑动锁定构件(30’)包括接收导螺杆(98)并与之配合的螺纹孔口(410)。应当注意,螺纹孔口410可以是盲孔而不是通孔。可以在本体(400)与盲孔(406)中的滑动锁定构件(30’)之间采用诸如键和键槽的防旋转特征(未示出),使得当导螺杆(98)旋转时,防止滑动锁定构件(30’)旋转并迫使其平移。可替代地,滑动锁定构件可以是外螺纹的,通过齿轮的旋转被降低以引起滑动锁定构件的平移,等等。
76.在一些实施例中,马达(36’)、齿轮减速器(96)、导螺杆(98)和滑动锁定构件(30’)沿着纵向轴线(402)对准。电线或电缆可以从动力锁定装置延伸(例如,从动力锁定装置的后部)。这可能不是本发明的其他实施例的情况。
77.该滑动锁定构件(30’)可以在该本体(400)的外部轴向地延伸经过该第一轴向端(404),并且可以进一步包括唇形密封(412),其被布置在该盲孔(406)中靠近该第一轴向端(404)并且接触该滑动锁定构件(30’)。这可以防止碎屑进入装置。因此,装置的本体可以是密封管。
78.本体(400)可以包括圆柱形配置,该圆柱形配置包括具有头部部分(66)和后部(58)(例如参见图6)的外圆柱形表面(92)(例如参见图11)。同样如图6所示,电池和电路(38)可以布置在盲孔(406)中靠近底表面(408),并且马达(36’)可以布置在电池和电路(38)附近。密封环(40)可布置在本体的后部(58)上,但不一定如此。
79.在图11中,外圆柱表面(92)可包括外螺纹94。在这样的实施例中,传统的扳手或扳钳等可用于从适配器安装和拆卸动力锁定装置。可以使用其它附接方法,例如紧固件、固定板、卡环等。
80.可以提供使用电活性聚合物的另一个动力锁定装置(500、500’),该另一个动力锁定装置可以与这些适配器(10、10a)一起使用并且可以以与现在将讨论的在此早先讨论的任何其他动力锁定装置类似的方式来配置或操作。
81.如图12和图13所示,这种动力锁定装置(500、500’)可包括限定纵向轴线(504、504’)的本体(502、502’),沿纵向轴线(504、504’)布置的第一轴向端(506、506’)、沿纵向轴线(504、504’)布置的第二轴向端(508、508’),以及从第一轴向端(506、506’)延伸的盲孔
(510、510’),该盲孔包括靠近第二轴向端(508、508’)布置的底表面(512、512’)。
82.电活性聚合物(514、514’)可以布置在盲孔(510、510’)中。同样,滑动锁定构件(516、516’)也可以布置在盲孔(510、510’)中,该盲孔接触电活性聚合物(514、514’)。电流源(518)可以与电活性聚合物(514、514’)电连通。电流源(518)可以采取电压源(520)的形式,该电压源与本体(502、502’)和电活性聚合物(514、514’)连通。
83.唇形密封(412)可以如本文前面所述的那样提供(参见图11),或者动力锁定装置(500、500’)可以如图4至图6所示的那样配置。
84.在图12中,滑动锁定构件(516)包括面向本体(502)的第二轴向端(508)的后激活表面(522),并且电活性聚合物(514)接触本体(502)的第二轴向端(508)和滑动锁定构件(516)的后激活表面(522)以及底表面(512)。在该实施例中,电活性聚合物(514)在接收电流时收缩以解锁。相反的情况在本发明的其它实施例中可能是正确的。
85.在图13中,滑动锁定构件(516’)包括前锁定部分(524)、包括前激活表面(528)的后头部部分(526),以及将前锁定部分(524)连接到后头部部分(526)的杆(529)。该电活性聚合物(514’)接触该动力锁定装置(500’)的本体(502’)和该后头部部分(526)的前激活表面(528)。
86.动力锁定装置(500’)的本体(502’)可包括具有布置在盲孔(510’)中的中心孔口(532)的前环部分(530)。滑动锁定构件(516’)的杆部分(529)延伸穿过中心孔口(532),使得前锁定部分(524)布置在第一轴向端(506’)附近。该杆部分(529)可以至少部分地轴向地布置在该本体(502’)的前环部分(530)与该滑动锁定构件(516’)的后头部部分(526)之间,并且该电活性聚合物(514’)可以接触该前环部分(530),该杆部分(529,这在某些实施例中可以不是这种情况,因为可以提供间隙以允许该聚合物的径向膨胀),以及该滑动锁定构件(516’)的后头部部分(526)的前激活表面(528)。
87.图13中的动力锁定装置(500’)可以在电活性聚合物(514’)接收电流时膨胀。对于图12所示的实施例可以是相反的。
88.本文所公开的任何动力锁定装置可以是无线激活的,和/或经由硬布线电动/电子激活的。
89.任何上述部件可由任何合适的材料制成,包括铁、灰铸铁、钢、塑料、橡胶、泡沫等。
90.提供通过硬布线以无线方式、电动方式或电子方式致动的锁定装置可保护锁定装置,延长其寿命,同时还减少锁定装置变得卡住的可能性,这可导致难以从作业工具(例如铲、铲斗等)移除齿和适配器或工具安装件等。
91.为此,参考图10可以理解根据本发明的实施例的在现场使用动力锁定装置将尖端附接到适配器和从适配器拆卸尖端的方法。
92.方法(300)可以包括将具有中空内部的尖端插入适配器的引导部分上,直到动力锁定装置与尖端或适配器的孔口对准(步骤302),并且使动力锁定装置的电活性聚合物膨胀或收缩,使得锁定构件移动到孔口中,将尖端保持在适配器上(步骤304)。锁定构件可以平移、旋转等。
93.该方法(300)可以进一步包括使该动力锁定装置的电活性聚合物的膨胀或收缩反向,使得该锁定构件移出该孔口(步骤306),并且将该尖端从该适配器移除(步骤308)。锁定构件可以平移、旋转等。
94.方法(300)还可包括将动力锁定装置安装到适配器的孔口中(步骤310),以及缩回锁定构件(步骤312)。步骤310和312可以在步骤302和304之前发生,但不一定如此。
95.将尖端插入适配器上可以覆盖动力锁定装置,保护动力锁定装置免受撞击尖端外部的碎屑的影响(步骤314)。
96.应当理解,前面的描述提供了所公开的组件和技术的示例。然而,可以设想,本发明的其他实现在细节上可以不同于前述示例。对本发明或其示例的所有引用旨在引用在该点所讨论的特定示例,而并非旨在更一般地暗示对本发明的范围的任何限制。所有关于某些特征的区别和不一致的语言旨在表示对这些特征缺乏偏好,但并非将其完全排除在本发明的范围之外,除非另外指明。
97.除非本文另有说明,本文中对数值范围的叙述仅旨在用作单独提及落入该范围内的每个单独值的速记方法,并且每个单独值被并入说明书中,如同其在本文中被单独叙述一样。
98.对于本领域技术人员显而易见的是,在不脱离本发明的范围或精神的情况下,可以对本文所讨论的装置和组装方法的实施例进行各种修改和变化。通过考虑本文所公开的各种实施例的说明书和实践,本发明的其他实施例对于本领域技术人员将是显而易见的。例如,设备中的一些可以与在此描述的不同地配置和运行,并且任何方法的某些步骤可以被省略,以与具体提及的不同的顺序执行,或者在一些情况下同时执行或者在子步骤中执行。此外,可以对各种实施例的某些方面或特征进行变化或修改,以创建进一步的实施例,并且可以将各种实施例的特征和方面添加到其他实施例的其他特征或方面,或者替换其他实施例的其他特征或方面,以便提供更进一步的实施例。
99.因此,本发明包括适用法律允许的所附权利要求书中所述主题的所有修改和等同物。此外,上述元素在其所有可能的变化中的任何组合都被本发明所涵盖,除非本文另有说明或与上下文明显矛盾。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1