基于操作手柄先导控制信号的挖掘机工况识别方法与流程
1.本发明涉及工程机械技术领域,特别涉及一种基于操作手柄先导控制信号的挖掘机工况识别方法。
背景技术:
2.挖掘机作为一种典型的工程机械,凭借自身在恶劣多变作业环境下的强适应性和高灵活性成为城市改造、矿产资源开发、轨道建设等项目中不可或缺的关键土方施工设备。
3.随着快速交付建设项目需求的不断增长,在加快项目建设进度的同时尽可能的降低施工成本逐渐成为项目经理关注的重点。一方面,为了保障项目施工进度,项目经理需要实时掌握施工现场所有设备和人员的具体作业信息,例如,为了充分发挥挖掘机的作业能力,需要获悉挖掘机每个时刻所处的工作循环阶段,如挖掘、提升回转、卸荷、空斗返回、移动、待机等,据此统计分析出设备的循环时间、空闲时间、直接工作率等绩效指标,项目经理能够基于定量、可视化的绩效指标进行项目相关的决策,例如资源分配,工作计划和调度以及操作员培训等,这种数据驱动的项目决策基础就是包括挖掘机在内的设备工况的准确分析。另一方面,挖掘机作业过程中执行机构的动作规律和负载变化具有明显的周期性,现有的分档功率控制模式难以满足周期变化负载的变功率需求,使得发动机工作点远离经济工作区,造成大量的能源浪费和环境污染。为了提高施工设备的能量利用率,挖掘机制造商搭建了车辆健康监测系统,通过对系统关键运行参数的监测以期实现分阶段节能控制、节能减排的目标,其中,挖掘机的工况识别是提高发动机与负载匹配性的重要基础。因此,研究挖掘机工况的实时、准确识别方法对于提高项目建设进度、降低施工成本具有重要意义。
4.目前,机器视觉和多传感器信息融合技术是实现挖掘机工况识别的主要方法。基于机器视觉的挖掘机工况识别结果精度受视点和尺度偏差、环境光照等因素影响较大;通常算法复杂、计算量大,不利于在挖掘机行车控制器中完成计算;而通过现场预先设置的摄像机采集图片——远程计算机完成识别的方法无法将定量、可视化的工作效率指标反作用于挖掘机本身能量利用率的提高,即无法用于发动机工作点的实时调节、满足挖掘机的分阶段节能控制需求。基于多传感器信息融合技术的挖掘机工况识别方法忽略了液压系统响应存在固有的滞后性,根据执行机构的运动信息或液压系统的性能参数进行挖掘机工况识别会在工作循环阶段转换期间产生无法避免的延迟错误,进而影响整机操作的顺应性和分阶段节能控制的响应速度、效果。
5.为了依次完成一个完整工作周期内的五个工作循环阶段,挖掘机手需要按照一定顺序控制各执行机构动作。各工作循环阶段内发生动作的执行机构组合不同,并且某一关键执行机构的动作往往意味着某工况阶段的开始,如动臂提升代表着提升回转阶段的开始。而实时反应执行机构动作的原始信号就是操作手柄的控制信号。因此,操作手柄控制信号可以作为识别挖掘机工作循环阶段的依据。
技术实现要素:
6.本发明提供了一种基于操作手柄先导控制信号的挖掘机工况识别方法,其目的是为了解决传统的基于机器视觉和多传感器信息融合技术的挖掘机工况识别方法忽略了液压系统响应滞后性导致的错误识别,且识别结果无法应用于挖掘机分阶段节能控制的问题。
7.为了达到上述目的,本发明的实施例提供了一种基于操作手柄先导控制信号的挖掘机工况识别方法,包括:
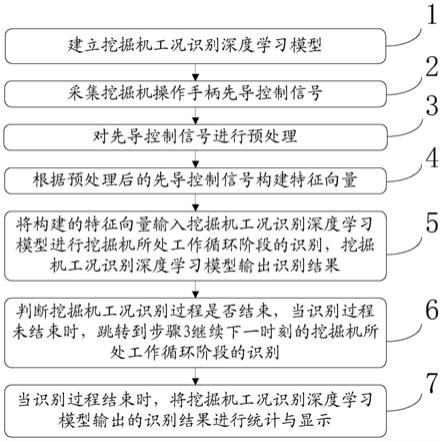
8.步骤1,建立挖掘机工况识别深度学习模型;
9.步骤2,采集挖掘机操作手柄先导控制信号;
10.步骤3,对先导控制信号进行预处理;
11.步骤4,根据预处理后的先导控制信号构建特征向量;
12.步骤5,将构建的特征向量输入挖掘机工况识别深度学习模型进行挖掘机所处工作循环阶段的识别,挖掘机工况识别深度学习模型输出识别结果;
13.步骤6,判断挖掘机工况识别过程是否结束,当识别过程未结束时,跳转到步骤3继续下一时刻的挖掘机所处工作循环阶段的识别;
14.步骤7,当识别过程结束时,将挖掘机工况识别深度学习模型输出的识别结果进行统计与显示。
15.其中,所述步骤1具体包括:
16.步骤11,将挖掘机挖掘准备阶段操作手柄先导控制信号波形、挖掘阶段操作手柄先导控制信号波形、提升回转阶段操作手柄先导控制信号波形、卸荷阶段操作手柄先导控制信号波形和空斗返回阶段操作手柄先导控制信号波形作为分段标志,对挖掘机作业循环进行分段,得到分段结果,分段结果包括挖掘准备阶段、挖掘阶段、提升回转阶段、卸荷阶段和空斗返回阶段;
17.步骤12,基于lstm深度学习模型建立挖掘机工作循环阶段识别深度学习模型,将分段标志作为挖掘机工况识别深度学习模型的输入,将分段结果作为挖掘机工况识别深度学习模型的输出,分段标志与分段结果之间的映射关系为挖掘准备阶段操作手柄先导控制信号波形对应挖掘准备阶段;挖掘阶段操作手柄先导控制信号波形对应挖掘阶段;提升回转阶段操作手柄先导控制信号波形对应提升回转阶段;卸荷阶段操作手柄先导控制信号波形对应卸荷阶段;空斗返回阶段操作手柄先导控制信号波形对应空斗返回阶段。
18.其中,所述步骤2具体包括:
19.当先导系统为电控先导系统时,采用电流传感器采集电控先导系统的铲斗联、斗杆联、动臂联和回转联的先导控制信号;当先导系统为液控先导系统时,采用压力传感器采集液控先导系统的铲斗联、斗杆联、动臂联和回转联先导控制信号;将采集到的先导控制信号输入行车控制器。
20.其中,所述步骤3具体包括:
21.步骤31,在行车控制器中采用smooth滤波去除先导控制信号中的噪声干扰,如下所示:
22.23.其中,表示滤波后的信号值,y(n
‑
2)、y(n
‑
1)、y(n)、y(n+1)、y(n+2)为原始信号值;
24.步骤32,采用系统抽样的方式降低滤波后的先导控制信号频率;
25.步骤33,对降低频率后的先导控制信号进行归一化处理,如下所示:
[0026][0027]
其中,x'表示归一化后的信号值,x表示归一化前的信号值,x
max
表示特征向量中某信号值的最大值,x
min
表示特征向量中某信号值的最小值。
[0028]
其中,所述步骤4具体包括:
[0029]
读取预处理后的先导控制信号,当先导系统为电控先导系统时,截取行车控制器一个pwm信号周期包含的铲斗联、斗杆联、动臂联和回转联先导控制信号,按铲斗联、斗杆联、动臂联、回转联的顺序构建特征向量;当先导系统为液控先导系统时,截取液控先导系统的铲斗联、斗杆联、动臂联和回转联0.5秒内的先导控制信号,按铲斗联、斗杆联、动臂联、回转联的顺序构建特征向量;
[0030]
特征向量构建,如下所示::
[0031]
(x
a1
,...,x
ak
,x
b1
,...,x
bl
,x
c1
,...,x
cm
,x
d1
,...,x
dn
)
ꢀꢀꢀ
(3)
[0032]
其中,x
a1
,...,x
ak
为归一化后的铲斗联先导控制信号离散数据;x
b1
,...,x
bl
为归一化后的斗杆联先导控制信号离散数据;x
c1
,...,x
cm
为归一化后的动臂联先导控制信号离散数据;x
d1
,...,x
dn
为归一化后的回转联先导控制信号离散数据。
[0033]
其中,所述步骤5具体包括:
[0034]
将构建的特征向量输入挖掘机工况识别深度学习模型,根据挖掘机工况识别深度学习模型输出结果中最大概率值的序号判断挖掘机当前时刻所处的工作循环阶段;当最大概率值的序号为1时,挖掘机当前时刻的工作循环阶段为挖掘准备阶段;当最大概率值的序号为2时,挖掘机当前时刻的工作循环阶段为挖掘阶段;当最大概率值的序号为3时,挖掘机当前时刻的工作循环阶段为提升回转阶段;当最大概率值的序号为4时,挖掘机当前时刻的工作循环阶段为卸荷阶段;当最大概率值的序号为5时,挖掘机当前时刻的工作循环阶段为空斗返回阶段。
[0035]
其中,所述步骤6具体包括:
[0036]
当识别过程未结束时,将截取的先导控制信号中最早读入的一组数据剔除,在最晚读入的数据后添加下一组先导控制信号数据,保持数据总量不变,重复执行所述步骤3至所述步骤6,直到没有先导控制信号数据读入,结束挖掘机的工况识别。
[0037]
其中,所述步骤7具体包括:
[0038]
步骤71,根据得出的当前时刻挖掘机工作循环阶段,统计挖掘机工作效率指标,工作效率指标包括完成每个工作循环阶段的次数、一次完整工作循环的平均耗时、一次完整工作循环中各阶段平均耗时和占比,当最后一个时刻挖掘机的工作循环阶段为k时,每个工作循环阶段的循环次数,如下所示:
[0039]
[0040]
其中,n
i
表示每个工作循环阶段的循环次数,n表示循环次数,i表示工作循环阶段,k=1,2,3,4,5分别表示挖掘准备、挖掘、提升回转、卸荷、空斗返回阶段;
[0041][0042]
其中,t表示完成一次工作循环平均耗时,t表示挖掘机完成所有完整工作循环总耗时;
[0043][0044]
其中,t
i
表示一次工作循环中每一工作循环阶段平均耗时,m
i
表示挖掘机工作循环阶段识别结果序列中,代表每一工作循环阶段的值出现的总次数,δt表示行车控制器采样时间间隔;
[0045][0046]
其中,w
i
表示一次工作循环中每一工作循环阶段平均耗时占比。
[0047]
其中,所述步骤7还包括:
[0048]
步骤72,通过can总线将挖掘机工况识别结果和统计的工作效率指标传输至液晶显示屏;
[0049]
步骤73,在液晶显示屏上将挖掘机工作循环阶段以曲线的形式进行显示,曲线的横坐标为当前时刻,曲线的纵坐标为挖掘机在当前时刻的工作循环阶段;其中,曲线的纵坐标值为1时,挖掘机当前时刻的工作循环阶段为挖掘准备阶段,曲线的纵坐标值为2时,挖掘机当前时刻的工作循环阶段为挖掘阶段,曲线的纵坐标值为3时,挖掘机当前时刻的工作循环阶段为提升回转阶段,曲线的纵坐标值为4时,挖掘机当前时刻的工作循环阶段为卸荷阶段,曲线的纵坐标值为5时,挖掘机当前时刻的工作循环阶段为空斗返回阶段;
[0050]
步骤74,在液晶显示屏上将挖掘机工作效率指标以表格的形式进行显示;
[0051]
步骤75,将液晶显示屏外接控制器,将挖掘机当前时刻的工作循环阶段和统计的工作效率指标通过控制器上传至挖掘机物联网平台进行挖掘机工作状态的远程监控。
[0052]
本发明的上述方案有如下的有益效果:
[0053]
本发明的上述实施例所述的基于操作手柄先导控制信号的挖掘机工况识别方法,采用能够实时反应执行机构运行状态的操作手柄控制信号波形作为识别标志,实时性高,采用能够有效解决信息长期依赖关系的lstm分类器,更加适用于挖掘机工作循环阶段这一序列数据分类问题,准确性高。
附图说明
[0054]
图1为本发明的具体流程图;
[0055]
图2为本发明的流程图;
[0056]
图3为本发明的lstm分类器结构示意图。
具体实施方式
[0057]
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具
体实施例进行详细描述。
[0058]
本发明针对现有的基于机器视觉和多传感器信息融合技术的挖掘机工况识别方法忽略了液压系统响应滞后性导致的错误识别,且识别结果无法应用于挖掘机分阶段节能控制问题,提供了一种基于操作手柄先导控制信号的挖掘机工况识别方法。
[0059]
如图1至图3所示,本发明的实施例提供了一种基于操作手柄先导控制信号的挖掘机工况识别方法,包括:步骤1,建立挖掘机工况识别深度学习模型;步骤2,采集挖掘机操作手柄先导控制信号;步骤3,对先导控制信号进行预处理;步骤4,根据预处理后的先导控制信号构建特征向量;步骤5,将构建的特征向量输入挖掘机工况识别深度学习模型进行挖掘机所处工作循环阶段的识别,挖掘机工况识别深度学习模型输出识别结果;步骤6,判断挖掘机工况识别过程是否结束,当识别过程未结束时,跳转到步骤3继续下一时刻的挖掘机所处工作循环阶段的识别;步骤7,当识别过程结束时,将挖掘机工况识别深度学习模型输出的识别结果进行统计与显示。
[0060]
其中,所述步骤1具体包括:步骤11,将挖掘机挖掘准备阶段操作手柄先导控制信号波形、挖掘阶段操作手柄先导控制信号波形、提升回转阶段操作手柄先导控制信号波形、卸荷阶段操作手柄先导控制信号波形和空斗返回阶段操作手柄先导控制信号波形作为分段标志,对挖掘机作业循环进行分段,得到分段结果,分段结果包括挖掘准备阶段、挖掘阶段、提升回转阶段、卸荷阶段和空斗返回阶段;步骤12,基于lstm深度学习模型建立挖掘机工作循环阶段识别深度学习模型,将分段标志作为挖掘机工况识别深度学习模型的输入,将分段结果作为挖掘机工况识别深度学习模型的输出,分段标志与分段结果之间的映射关系为挖掘准备阶段操作手柄先导控制信号波形对应挖掘准备阶段;挖掘阶段操作手柄先导控制信号波形对应挖掘阶段;提升回转阶段操作手柄先导控制信号波形对应提升回转阶段;卸荷阶段操作手柄先导控制信号波形对应卸荷阶段;空斗返回阶段操作手柄先导控制信号波形对应空斗返回阶段。
[0061]
其中,所述步骤2具体包括:当先导系统为电控先导系统时,采用电流传感器采集电控先导系统的铲斗联、斗杆联、动臂联和回转联的先导控制信号;当先导系统为液控先导系统时,采用压力传感器采集液控先导系统的铲斗联、斗杆联、动臂联和回转联先导控制信号;将采集到的先导控制信号输入行车控制器。
[0062]
其中,所述步骤3具体包括:步骤31,在行车控制器中采用smooth滤波去除先导控制信号中的噪声干扰,如下所示:
[0063][0064]
其中,表示滤波后的信号值,y(n
‑
2)、y(n
‑
1)、y(n)、y(n+1)、y(n+2)为原始信号值;
[0065]
步骤32,采用系统抽样的方式降低滤波后的先导控制信号频率;
[0066]
步骤33,对降低频率后的先导控制信号进行归一化处理,如下所示:
[0067][0068]
其中,x'表示归一化后的信号值,x表示归一化前的信号值,x
max
表示特征向量中某
信号值的最大值,x
min
表示特征向量中某信号值的最小值。
[0069]
本发明的上述实施例所述的基于操作手柄先导控制信号的挖掘机工况识别方法,根据行车控制器处理数据的能力,采用系统抽样的方式降低先导控制信号频率,设置有100hz、50hz、25hz、20hz和10hz,共5种频率,保证识别工作循环阶段的实时性。
[0070]
其中,所述步骤4具体包括:读取预处理后的先导控制信号,当先导系统为电控先导系统时,截取行车控制器一个pwm信号周期包含的铲斗联、斗杆联、动臂联和回转联先导控制信号,按铲斗联、斗杆联、动臂联、回转联的顺序构建特征向量;当先导系统为液控先导系统时,截取液控先导系统的铲斗联、斗杆联、动臂联和回转联0.5秒内的先导控制信号,按铲斗联、斗杆联、动臂联、回转联的顺序构建特征向量;
[0071]
特征向量构建,如下所示:
[0072]
(x
a1
,...,x
ak
,x
b1
,...,x
bl
,x
c1
,...,x
cm
,x
d1
,...,x
dn
)
ꢀꢀꢀ
(3)
[0073]
其中,x
a1
,...,x
ak
为归一化后的铲斗联先导控制信号离散数据;x
b1
,...,x
bl
为归一化后的斗杆联先导控制信号离散数据;x
c1
,...,x
cm
为归一化后的动臂联先导控制信号离散数据;x
d1
,...,x
dn
为归一化后的回转联先导控制信号离散数据。
[0074]
其中,所述步骤5具体包括:将构建的特征向量输入挖掘机工况识别深度学习模型,根据挖掘机工况识别深度学习模型输出结果中最大概率值的序号判断挖掘机当前时刻所处的工作循环阶段;当最大概率值的序号为1时,挖掘机当前时刻的工作循环阶段为挖掘准备阶段;当最大概率值的序号为2时,挖掘机当前时刻的工作循环阶段为挖掘阶段;当最大概率值的序号为3时,挖掘机当前时刻的工作循环阶段为提升回转阶段;当最大概率值的序号为4时,挖掘机当前时刻的工作循环阶段为卸荷阶段;当最大概率值的序号为5时,挖掘机当前时刻的工作循环阶段为空斗返回阶段。
[0075]
其中,所述步骤6具体包括:当识别过程未结束时,将截取的先导控制信号中最早读入的一组数据剔除,在最晚读入的数据后添加下一组先导控制信号数据,保持数据总量不变,重复执行所述步骤3至所述步骤6,直到没有先导控制信号数据读入,结束挖掘机的工况识别。
[0076]
其中,所述步骤7具体包括:步骤71,根据得出的当前时刻挖掘机工作循环阶段,统计挖掘机工作效率指标,工作效率指标包括完成每个工作循环阶段的次数、一次完整工作循环的平均耗时、一次完整工作循环中各阶段平均耗时和占比,当最后一个时刻挖掘机的工作循环阶段为k时,每个工作循环阶段的循环次数,如下所示:
[0077][0078]
其中,n
i
表示每个工作循环阶段的循环次数,n表示循环次数,i表示工作循环阶段,k=1,2,3,4,5分别表示挖掘准备、挖掘、提升回转、卸荷、空斗返回阶段;
[0079][0080]
其中,t表示完成一次工作循环平均耗时,t表示挖掘机完成所有完整工作循环总耗时;
[0081][0082]
其中,t
i
表示一次工作循环中每一工作循环阶段平均耗时,m
i
表示挖掘机工作循环阶段识别结果序列中,代表每一工作循环阶段的值出现的总次数,δt表示行车控制器采样时间间隔;
[0083][0084]
其中,w
i
表示一次工作循环中每一工作循环阶段平均耗时占比。
[0085]
其中,所述步骤7还包括:步骤72,通过can总线将挖掘机工况识别结果和统计的工作效率指标传输至液晶显示屏;步骤73,在液晶显示屏上将挖掘机工作循环阶段以曲线的形式进行显示,曲线的横坐标为当前时刻,曲线的纵坐标为挖掘机在当前时刻的工作循环阶段;其中,曲线的纵坐标值为1时,挖掘机当前时刻的工作循环阶段为挖掘准备阶段,曲线的纵坐标值为2时,挖掘机当前时刻的工作循环阶段为挖掘阶段,曲线的纵坐标值为3时,挖掘机当前时刻的工作循环阶段为提升回转阶段,曲线的纵坐标值为4时,挖掘机当前时刻的工作循环阶段为卸荷阶段,曲线的纵坐标值为5时,挖掘机当前时刻的工作循环阶段为空斗返回阶段;步骤74,在液晶显示屏上将挖掘机工作效率指标以表格的形式进行显示;步骤75,将液晶显示屏外接控制器,将挖掘机当前时刻的工作循环阶段和统计的工作效率指标通过控制器上传至挖掘机物联网平台进行挖掘机工作状态的远程监控。
[0086]
本发明的上述实施例所述的基于操作手柄先导控制信号的挖掘机工况识别方法,lstm深度学习模型采用5层深度学习网络结构,包括输入层、rnn层、第一个全连接层、第二个全连接层和输出层;输入层节点为特征向量包含的元素数,rnn层为包含320个节点的lstm深度学习模型,第一个全连接层全连接层具有80个节点,第二个全连接层全连接层具有20个节点,输出层具有5个节点,与挖掘机活动类型数量相匹配;输入层和rnn层之间采用sigmoid激活函数,rnn层和第一个全连接层之间采用tanh激活函数,第一个全连接层和第二个全连接层采用relu激活函数,第二个全连接层和输出层采用softmax激活函数。
[0087]
本发明的上述实施例所述的基于操作手柄先导控制信号的挖掘机工况识别方法,采集挖掘机实际作业过程中的先导控制信号,从50组有效的完整挖掘测试数据中提取28000个特征向量,与对应输出一起构成样本空间;将样本空间按照8:2的比例分为训练集和验证集;挖掘机工况识别深度学习模型采用初始学习速率为0.001的adam算法优化完成模型可训练参数的迭代更新,最大迭代步数设置为50步;将训练好的挖掘机工况识别深度学习模型内嵌入行车控制器。
[0088]
本发明的上述实施例所述的基于操作手柄先导控制信号的挖掘机工况识别方法,采用实时反应执行机构运行状态的操作手柄控制信号波形作为识别标志,实时性高,基于能解决信息长期依赖关系的lstm深度学习模型建立挖掘机工况识别深度学习模型进行挖掘机工作循环阶段这一序列数据分类问题,准确性高,识别结果可应用于挖掘机分阶段节能控制。
[0089]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1