冲厕装置的制作方法
1.本发明的形态一般涉及一种冲厕装置。
背景技术:
2.已周知具备探测部及控制部的冲厕装置,该探测部探测在大便器的盆部的表面上是否存在水,该控制部根据该探测部的探测结果对大便器的堵塞进行判定(专利文献1)。
3.专利文献专利文献1:日本国特开2020-66889号公报
技术实现要素:
4.例如,当在大便器的盆部的表面上附着有污物时,探测部探测到该污物而有可能误判定成大便器发生了堵塞。此时,无法使用大便器,大便器的使用方便性变差。
5.本发明的形态是基于这样的课题的认识而进行的,所要解决的技术问题是提供一种冲厕装置,其能够有效地探测大便器的堵塞状态来提高大便器的使用方便性。
6.本发明是一种冲厕装置,具备:探测部,探测在大便器的盆部的表面上的比满水位更低且比封水位更高的位置是否存在清洗水;及控制部,根据在设置于向所述盆部吐出清洗水的流路的清洗水供给部关闭之后的所述探测部的探测结果,对所述大便器的堵塞状态进行判定,其特征为,所述探测部的探测区域是在所述盆部的所述表面上的所述清洗水供给部关闭之后从所述流路的吐水口朝着所述盆部的底部在铅直方向上流动的清洗水所通过的位置。
7.根据本发明的形态,提供一种冲厕装置,其能够有效地探测大便器的堵塞状态来提高大便器的使用方便性。
附图说明
8.图1是表示具有本发明的实施方式所涉及的冲厕装置的冲厕系统的结构的模式图。图2(a)及图2(b)是模式化表示在盆部的表面上流动的清洗水的状态的剖视图。图3(a)及图3(b)是模式化表示在盆部的表面上流动的清洗水的状态的剖视图。图4是模式化表示清洗水供给部发生故障的情况的剖视图。图5是模式化表示在盆部的表面上的探测部的探测区域的位置的放大剖视图。图6(a)~图6(c)是当探测部为电波传感器时的特征线图。图7(a)~图7(c)是当设置于本发明的第1变形例所涉及的冲厕装置的探测部为静电电容传感器时的特征线图。图8是表示本发明的第2变形例所涉及的冲厕装置的与图3(b)相同的剖视图。图9是表示本发明的第3变形例所涉及的水箱式冲厕装置的结构的模式图。符号说明
1-冲厕系统;10-大便器;10a-上面;10b-收纳空间;11-盆部;11a-底部;12-表面;12a-后侧;12b-前侧;13-开口部;20-流路;21-供水管路;22-清洗水通路;23-主通路;24-第1分支通路;24a-第1吐水口;25-第2分支通路;25a-第2吐水口;30-清洗水供给部;40-冲厕装置;41-探测部;42-探测区域;45-供给控制部(控制部);46-堵塞判定部;47-清洗水供给判定部;48-故障判定部;49-开闭控制部;100-大便器;200-水箱;240-吐水口;300-清洗水供给部;420-探测区域;p-电波;s1-满水位;s2-封水位;s3-限界水位;s4-中央位置;w-清洗水。
具体实施方式
9.以下,参照附图对本发明的实施方式进行说明。并且,在各附图中,对相同的构成要素标注相同的符号并适当省略详细说明。图1是表示具有本发明的实施方式所涉及的冲厕装置的冲厕系统的结构的模式图。如图1所示,实施方式所涉及的冲厕系统1具备:大便器10,具有盆部11;清洗水供给部30,向盆部11供给清洗水w;及冲厕装置40。本技术说明书中,“上方”、“下方”、“前方”、“后方”、“左侧方”、“右侧方”分别是从就座于大便器10的便座的使用者观察的方向。
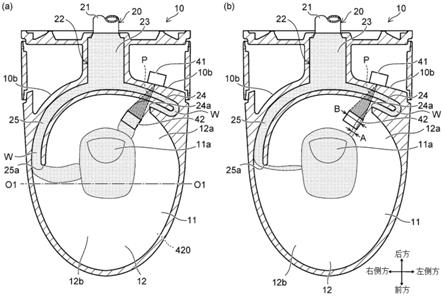
10.图2(a)及图2(b)是模式化表示在盆部的表面上流动的清洗水的状态的剖视图。图3(a)及图3(b)是模式化表示在盆部的表面上流动的清洗水的状态的剖视图。图2(a)是模式化表示清洗中的盆部的表面的剖视图。图2(b)是模式化表示刚关闭之后的清洗水供给部的剖视图。图3(a)是模式化表示从清洗水供给部关闭之后进一步经过时间的状态的剖视图。图3(b)是模式化表示清洗刚要结束之前的状态或清洗水供给部发生故障的情况的剖视图。图4是模式化表示清洗水供给部发生故障的情况的剖视图。图5是模式化表示在盆部的表面上的探测部的探测区域的位置的放大剖视图。
11.大便器10是所谓的西式大便器,在上面10a配设有未图示的便座。大便器10具有从上面10a向下方凹下的凹状的盆部11。即,大便器10的上面10a的内侧端部成为盆部11的开口部13。大便器10在盆部11中承接使用者的小便、大便等排泄物。当使用者进行便器清洗的操作或者从便座站立时,从流路20供给清洗水w而排出盆部11内的排泄物,由此实施清洗盆部11的表面12的便器清洗。在便器清洗结束之后,清洗水w(封水)积存在盆部11的底部11a。盆部11的表面12的后侧12a比前侧12b更加以垂直状形成。
12.流路20连接未图示的供水源与盆部11之间。流路20中流经供向盆部11的清洗水w。流路20具有:供水管路21,从供水源延伸至大便器10;及清洗水通路22,设置在大便器10的内部,从供水管路21延伸至盆部11。
13.清洗水通路22在大便器10的内部以两股状被分开。具体而言,清洗水通路22具有:主通路23,连接于供水管路21;第1分支通路24,从主通路23以顺时针方向(左侧方)延伸,连通于盆部11的表面12;及第2分支通路25,从主通路23以逆时针方向(右侧方)延伸,在不同于第1分支通路24的位置连通于盆部11的表面12。第1分支通路24、第2分支通路25是形成于盆部11的开口部13侧(上面10a侧)的内缘导水路。
14.第1分支通路24具有在盆部11的表面12上开口的第1吐水口24a。另一方面,第2分支通路25具有在盆部11的表面12上开口的第2吐水口25a。第1吐水口24a与第2吐水口25a在不同的位置连通于盆部11的表面12。
15.第1吐水口24a从盆部11的左后侧沿着盆部11的表面12吐出清洗水w。另一方面,第2吐水口25a被配置成周向上离开第1吐水口24a。第2吐水口25a从盆部11的右侧方沿着盆部11的表面12吐出清洗水w。
16.而且,第1吐水口24a、第2吐水口25a以清洗水w在盆部11的表面12上逆时针方向流动的方式吐水。即,大便器10具备向盆部11吐出清洗水w的两处吐水口(第1吐水口24a、第2吐水口25a)。并且,第1吐水口24a、第2吐水口25a还可以在盆部11的周向上离开而设置于其他位置。
17.清洗水供给部30设置在向盆部11吐出清洗水w的流路20上。具体而言,清洗水供给部30设置在流路20的供水管路21上。清洗水供给部30具有例如通过电磁线圈或马达等进行开闭的开闭阀,连接于自来水管或贮水水箱等供水源。清洗水供给部30例如具有冲洗阀。清洗水供给部30连接于开闭控制部49,通过来自开闭控制部49的指令信号控制开闭。除此之外,清洗水供给部30还可以适当具有贮存水的水箱、加压输送水的泵等。
18.当使用者通过未图示的遥控器等进行用于清洗大便器10的清洗操作时,开闭控制部49向清洗水供给部30发送对应于该清洗操作的信号。根据从开闭控制部49发送的指令信号(打开信号),清洗水供给部30从关闭状态切换到打开状态。由此,从供水源介由流路20向大便器10供给清洗水w。
19.冲厕装置40具备:探测部41,设置于大便器10;及供给控制部45,连接于探测部41。探测部41例如安装于与盆部11的表面12相对的大便器10的内部或外面。举一个例子,探测部41安装于左右方向上夹住流路20的主通路23的大便器10的收纳空间10b。
20.探测部41探测在盆部11是否存在清洗水w。具体而言,探测部41探测在大便器10的盆部11的表面12上的比满水位s1更低且比封水位s2更高的位置是否存在清洗水w。满水位s1是清洗水w从盆部11内部发生溢出的位置,是大便器10的上面10a的位置。封水位s2是在大便器10的清洗结束之后积存在盆部11的底部11a的清洗水w(封水)的位置。
21.根据在盆部11的表面12上流动的清洗水w的水量或流速,探测部41将不同的探测结果输出(发送)至供给控制部45。根据从探测部41输出的探测信号,供给控制部45对大便器10的堵塞状态进行判定。另外,根据从探测部41输出的探测信号,供给控制部45对清洗水供给部30的故障进行判定。作为探测部41而使用电波传感器(微波传感器)或静电电容传感器等。
22.电波传感器发射电波且探测其反射波。反射波的强度因发射电波的位置处的水的存在与否而发生变化。当作为探测部41而使用电波传感器时,以向盆部11的表面12的规定区域发射电波的方式设置探测部41。
23.另外,静电电容传感器对在该传感器和与此相对的规定区域之间的静电电容进行探测。静电电容根据在该规定区域中的水的体积而发生变化。当作为探测部41而使用静电电容传感器时,以与盆部11的表面12的探测区域相对的方式设置探测部41。
24.通过作为探测部41而使用电波传感器或静电电容传感器,能够探测出盆部11内的水位是否位于比规定区域更高的位置。另外,通过将静电电容传感器以不同的高度连续配
置在多处,从而能够直接探测出水位。
25.本实施方式中,例示了将作为探测部41的电波传感器设置在大便器10内部(收纳空间10b)的情况。在该例子中,探测部41发射电波p,探测在盆部11的表面12上的比满水位s1更低且比封水位s2更高的位置是否存在清洗水w。即,探测部41探测因大便器10的堵塞而清洗水w积存在比封水位s2更高的位置的状态。关于探测部41的探测区域42及探测方法,在以后进行说明。
26.供给控制部45例如设置于大便器10。并且,供给控制部45既可以设置在放置于大便器10的上面10a的壳(未图示)中,还可以设置在大便器10的外部(例如洗手间)。由于供给控制部45构成本发明的控制部,因此根据从探测部41输出的探测结果的经时变化,对大便器10的堵塞状态及清洗水供给部30的故障进行判定。
27.供给控制部45连接于探测部41、开闭控制部49。另外,供给控制部45连接于通知装置(未图示),其例如用于通知大便器10的堵塞状态或者清洗水供给部30的故障。
28.供给控制部45具有堵塞判定部46,其根据探测部41的探测结果对大便器10是否发生了堵塞进行判定。另外,供给控制部45具有清洗水供给判定部47,其根据堵塞判定部46的判定结果对能否将清洗水w供向大便器10的盆部11进行判定。另外,供给控制部45具有故障判定部48,其根据探测部41的探测结果对清洗水供给部30是否发生了故障进行判定。
29.供给控制部45将清洗水供给判定部47的判定结果发送至对清洗水供给部30的开闭动作进行控制的开闭控制部49。并且,开闭控制部49还可以与供给控制部45呈一体。另外,堵塞判定部46、清洗水供给判定部47、故障判定部48、开闭控制部49分别还可以是不同的控制部。
30.当从清洗水供给部30的关闭开始经过规定时间之后探测部41探测到清洗水w时,供给控制部45的堵塞判定部46判定为大便器10发生了堵塞。例如通过从清洗水供给部30的关闭开始经过规定时间之后的电压值,堵塞判定部46对大便器10是否发生了堵塞进行判定。关于堵塞判定部46对大便器10堵塞的判定,在以后进行说明。
31.当堵塞判定部46判定为大便器10发生了堵塞时,清洗水供给判定部47判定为不能向盆部11供给清洗水w。另外,清洗水供给判定部47判定为,从清洗水供给部30的关闭到对大便器10的堵塞状态的判定结束为止不能向盆部11供给清洗水w。即,从清洗水供给部30的关闭到对大便器10的堵塞状态的判定结束为止,清洗水供给判定部47禁止清洗水供给部30的打开动作。
32.而且,供给控制部45向开闭控制部49发送清洗水供给判定部47的禁止供给清洗水w的指令信号。当开闭控制部49接收禁止供给清洗水w的指令信号时,即使接收来自使用者的便器清洗的指令信号,也禁止清洗水供给部30的打开动作。
33.当从清洗水供给部30的关闭开始经过规定时间之后探测部41探测到清洗水w时,供给控制部45的故障判定部48判定为清洗水供给部30发生了故障。在执行大便器10的清洗及对大便器10的堵塞进行判定时以外,故障判定部48执行故障判定。即,在大便器10未被使用的待机中,执行清洗水供给部30的故障判定。
34.清洗水供给部30的故障是指如下状态,即因清洗水供给部30的止水不良或不完全的关闭状态等而从供水管路21继续向盆部11供给清洗水w。作为该故障,例如可举出清洗水供给部30自身的故障或因垃圾进入清洗水供给部30的密封部(未图示)而发生的止水不良
等。关于故障判定部48对清洗水供给部30的故障判定,在以后进行说明。
35.接下来,对使清洗水w在大便器10的盆部11流动时的状态进行说明。
36.首先,如图2(a)所示,当清洗水供给部30切换到打开状态时,从流路20的第1吐水口24a、第2吐水口25a朝着盆部11的表面12吐出清洗水w。由此,使清洗水w流遍盆部11的表面12的整体,能够对盆部11的表面12进行清洗。
37.接下来,当清洗水供给部30从打开状态切换到关闭状态时,残留在清洗水供给部30的下游侧的流路20中的清洗水w吐向盆部11。此时,如图2(b)所示,在盆部11的表面12上,从第1吐水口24a、第2吐水口25a吐出的清洗水w的水量及流速降低,因此清洗水w以较小的回旋量流向盆部11的底部11a。
38.之后,如图3(a)、图3(b)所示,清洗水w的水量及流速逐渐降低,清洗水w从第1吐水口24a、第2吐水口25a在铅直方向上流向盆部11的底部11a。即,清洗水w从第1吐水口24a、第2吐水口25a朝着盆部11的底部11a滴落。之后,当来自第1吐水口24a、第2吐水口25a的清洗水w的吐出结束时,处于清洗水w积存在盆部11的底部11a的状态。
39.如图1所示,在大便器10并未堵塞的通常的状态下,大便器10内的水(封水)的水面位置成为封水位s2。另一方面,当大便器10内有异物(未图示)堵塞时,清洗水w并不流动,因此大便器10内的水面位置成为比封水位s2更高且比满水位s1更低的限界水位s3。从而,即使有异物堵塞,通过清洗水w的1次供给,清洗水w也不会从盆部11溢出。即,限界水位s3是位于封水位s2与满水位s1之间且当大便器10堵塞时积存在盆部11的清洗水w的表面位置。
40.此时,限界水位s3是当相当于用于冲掉大便1次的清洗水w被供给时成为满水位s1的位置。换言之,限界水位s3是从满水位s1减去用于冲掉大便1次的清洗水w的位置。即,当清洗水w位于限界水位s3时,假设当供给用于冲掉大便1次的清洗水w时,清洗水w积存至满水位s1。而且,探测部41探测位于封水位s2与限界水位s3之间的清洗水w。
41.另一方面,如图4所示,当清洗水供给部30发生止水不良等故障时,清洗水w逐渐积存在第1分支通路24、第2分支通路25。之后,如图3(b)所示,最终清洗水w从第1吐水口24a、第2吐水口25a朝着盆部11的底部11a在铅直方向上流动。当清洗水供给部30发生故障时,例如反复处于图3(b)的状态与图4的状态。即,当清洗水供给部30发生故障时,清洗水w从第1吐水口24a、第2吐水口25a朝着盆部11的底部11a断续或继续在铅直方向上滴落。
42.接下来,关于探测部41对盆部11的表面12的探测区域42进行说明。如图2~图4所示,探测区域42设定在盆部11的表面12上的第1吐水口24a与盆部11的底部11a之间。
43.具体而言,如图3(b)所示,探测部41的探测区域42是在盆部11的表面12上的清洗水供给部30关闭之后从第1吐水口24a朝着盆部11的底部11a在铅直方向上流动的清洗水w所通过的位置。此时,从第1吐水口24a流出的清洗水w例如以1cm以上、6cm以下的宽度a(1cm≤a≤6cm)流落。
44.探测区域42的宽度为比在铅直方向上流动的清洗水w的宽度a更大的宽度b。换言之,探测区域42包括在清洗水供给部30关闭之后从流路20的第1吐水口24a朝着盆部11的底部11a在铅直方向上流动的清洗水w并不通过的位置。
45.探测区域42的宽度b例如沿着盆部11的表面12呈14mm以上。优选探测区域42的宽度b为24mm以上。考虑基于大便器10的形状及第1吐水口24a的位置、大小等的在铅直方向上流动的清洗水w的宽度a、位置,通过实验、模拟而设定探测区域42的宽度b。
46.由此,当清洗水供给部30发生故障时,清洗水w会在探测区域42的一部分中流动。从而,在探测区域42中流动的清洗水w的水量差,在清洗水供给部30发生故障的情况下与大便器10发生堵塞的情况下会较大地不同。其结果,供给控制部45能够高精度地对大便器10的堵塞状态及清洗水供给部30的故障进行判定。
47.优选探测部41的探测区域42位于比盆部11的前后方向的中心o1-o1更靠近后侧的吐水口的下方。此时,如图1所示,中心o1-o1可以是盆部11的开口部13的前后方向的长度l的中心。
48.由于盆部11的后侧12a比前侧12b更加以垂直状竖立设置,因此成为污物难以附着的位置。另外,由于在盆部11的表面12上的吐水口(第1吐水口24a)的下方是最终为止清洗水w流动的位置,因此成为污物更加难以附着的位置。
49.本实施方式中,在第1吐水口24a的下方设置有探测区域42。另外,如图5所示,探测区域42设置在盆部11的表面12的倾斜角度θ相对于铅直方向小于45度的位置。只要探测区域42包含倾斜角度θ小于45度的位置即可。即,只要探测区域42包含由铅直线c-c和盆部11的表面12的切线d-d所形成的角θ小于45度的位置的一部分即可。图5中,从探测部41发射的电波p的最大指向方向即中心p1通过的盆部11的表面12的倾斜角度θ小于45度。
50.由此,能够抑制探测部41对附着于盆部11的表面12的污物(例如,含有水分的排泄物)进行探测。从而,能够有效地探测出大便器10的堵塞状态,能够提高大便器10的使用方便性。
51.另外,当清洗水供给部30发生故障时,能够加快从第1吐水口24a朝着盆部11的底部11a在铅直方向上流动的清洗水w的流速。另一方面,当大便器10发生堵塞时,由于清洗水w积存在盆部11,因此在探测区域42中流动的清洗水w的流速较慢。
52.其结果,例如当探测部41计测在盆部11的表面12上流动的清洗水w的流速时,能够加大在大便器10发生堵塞的情况下与清洗水供给部30发生故障的情况下的清洗水w的流速差。从而,供给控制部45能够高精度地对大便器10的堵塞状态及清洗水供给部30的故障进行判定。
53.接下来,对由探测部41发射的电波p的上下方向的朝向进行说明。如图5所示,由于探测部41朝着斜上方照射电波p,由此在盆部11的后侧12a形成探测区域42。此时,探测部41的探测区域42的中心p1,位于比封水位s2与限界水位s3之间的中央位置s4更靠近上方的位置。
54.具体而言,探测部41的探测区域42的中心p1,在盆部11的表面12的后侧12a位于中央位置s4与限界水位s3之间。中心p1成为在探测部41的探测区域42中电波p的强度最大的最大指向方向。例如,以位于比中央位置s4更靠近上方的位置的方式,将探测部41的发射电波p的发射部配置于大便器10。由此,能够使电波p的中心p1位于比中央位置s4更靠近上方的盆部11的表面12。
55.有时盆部11的表面12具有亲水性。这样,清洗水w有可能伴随在盆部11的表面12上朝着底部11a流落而逐渐浸开。于是,通过使探测部41的探测区域42的中心p1位于清洗水w浸开之前的较高位置(限界水位s3侧),从而能够降低浸开的清洗水w的影响。从而,能够抑制探测部41因浸开的清洗水w而发生的误探测。
56.接下来,与时间经过一起对探测部41的探测状态的变化进行说明。
图6(a)~图6(c)是当探测部为电波传感器时的特征线图。图6(a)是当大便器并未发生堵塞时的特征线图。图6(b)是当大便器发生堵塞时的特征线图。图6(c)是当清洗水供给部发生故障时的特征线图。
57.首先,参照图6(a)对大便器10并未发生堵塞的通常状态的情况进行说明。
58.如图6(a)所示,在时刻t0,因使用者的便器清洗操作而清洗水供给部30从关闭状态切换到打开状态。由此,来自第1吐水口24a、第2吐水口25a的清洗水w在盆部11的表面12上流动(参照图2(a))。此时,由于探测部41能够在探测区域42的全域中探测到清洗水w,因此从电压v0成为电压v1。
59.在接下来的时刻t1,为了结束向盆部11的清洗水w的供给,清洗水供给部30从打开状态切换到关闭状态。另外,从清洗水供给部30关闭的时刻t1到对大便器10的堵塞状态的判定结束为止,供给控制部45禁止清洗水供给部30的打开动作。之后,从时刻t1到时刻t2为止,清洗水供给部30下游侧的流路20的清洗水w流遍盆部11的探测区域42的全域(图2(b)、图3(a))。从而,探测部41探测到清洗水w而维持电压v1。
60.在从时刻t2到时刻t3期间,从第1吐水口24a吐出的清洗水w的水量降低,清洗水w在探测区域42的一部分中流动。此时,在探测区域42内流动的清洗水w的水量如图3(a)、图3(b)所示地逐渐减少。由此,探测部41从电压v1向电压v0发生变化。之后,在时刻t3,来自第1吐水口24a、第2吐水口25a的吐水结束而成为电压v0。
61.在时刻t3,供给控制部45的堵塞判定部46对在大便器10清洗后被检测出的电压va与在大便器10的清洗中被检测出的最大值的电压vb之差是否为阈值vx以上进行运算,由此对大便器10是否发生了堵塞进行判定(|va-vb|≥vx)。阈值vx成为用于对大便器10的堵塞进行判定的值,预先储存在供给控制部45的存储部(未图示)。当大便器10并未发生堵塞时,时刻t3的电压va=v0与从时刻t1到t2为止的电压vb=v1之差的绝对值成为阈值vx以上(|v0-v1|≥vx)。
62.接下来,参照图6(b)对大便器10发生堵塞的情况进行说明。
63.当大便器10发生堵塞时,清洗水w的水面上升至盆部11的限界水位s3(参照图2(a)、图5)。从而,如图6(b)所示,在从时刻t2到时刻t3期间,没有电压v的变化,探测部41继续维持电压(va=vb=v1)。由此,供给控制部45的堵塞判定部46能够判定出大便器10发生了堵塞。
64.由于图6(b)所示的状态中大便器10的清洗中的电压vb与清洗后的电压va之间没有变化,因此是大便器10完全堵塞的状态。供给控制部45的堵塞判定部46例如设定基于覆盖探测区域42的清洗水w量的阈值vx,由此能够判定出大便器10的半堵塞状态。
65.接下来,参照图6(c)对清洗水供给部30发生故障的情况进行说明。
66.当清洗水供给部30发生止水不良等故障时,即使在清洗水供给部30进行关闭动作的时刻t2之后,从清洗水供给部30继续向清洗水通路22供给清洗水w。这样,例如在从时刻t3之前的时刻t4到经过时刻t3的时刻t5期间,持续处于清洗水w从第1吐水口24a朝着盆部11的底部11a在铅直方向上滴落的状态,之后清洗水w逐渐减少(参照图3(b))。
67.之后,在从时刻t5到时刻t6期间,从清洗水供给部30漏向清洗水通路22的清洗水w积存在第1分支通路24(参照图4)。之后,在从时刻t6到时刻t7期间,积存在第1分支通路24
的清洗水w从第1吐水口24a朝着盆部11的底部11a在铅直方向上滴落(参照图3(b))。
68.像这样,当清洗水供给部30发生故障时,在对大便器10的堵塞进行判定的时刻t3之后,断续发生电压v的变化。供给控制部45的故障判定部48检测出该电压v的变化,由此判定为清洗水供给部30发生了故障。
69.具体而言,供给控制部45的堵塞判定部46运算出时刻t3的电压va=v2与从时刻t1到时刻t2为止的电压vb=v1之差的绝对值成为阈值vx以上(|v2-v1|≥vx),由此判定为大便器10并未发生堵塞。
70.之后,供给控制部45的故障判定部48运算出在此之后的时刻t7的电压vc=v2与从时刻t5到时刻t6为止的电压v0之差的绝对值成为阈值vy以上(|v2-v0|≥vy),由此判定为清洗水供给部30发生了故障。阈值vy被设定为用于判定清洗水供给部30是否发生了止水不良等故障的值,预先储存在供给控制部45的存储部(未图示)。阈值vy成为小于当对大便器10的堵塞进行判定时的阈值vx的值。
71.因此,在本实施方式所涉及的冲厕装置40中,探测部41的探测区域42设置在盆部11的表面12上的清洗水供给部30关闭之后从流路(第1分支通路24)的吐水口(第1吐水口24a)朝着盆部11的底部11a在铅直方向上流动的清洗水w所通过的位置。
72.即,探测区域42设置在盆部11的表面12上的污物难以附着或已附着的污物容易被清洗水w冲落的位置。从而,能够高精度地对大便器10的堵塞进行判定。另外,通过将探测区域42设置在这样的位置,例如在大便器10并未被使用的待机中,即使不设置新的探测部,通过探测部41也能够对清洗水供给部30的止水不良等故障进行监控。
73.图7(a)~图7(c)是当设置于本发明的第1变形例所涉及的冲厕装置的探测部为静电电容传感器时的特征线图。图7(a)是当大便器并未发生堵塞时的特征线图。图7(b)是当大便器发生堵塞时的特征线图。图7(c)是当清洗水供给部发生故障时的特征线图。
74.首先,参照图7(a)对大便器10并未发生堵塞的通常状态的情况进行说明。
75.如图7(a)所示,在时刻t10,因使用者的便器清洗操作而清洗水供给部30从关闭状态切换到打开状态。由此,来自第1吐水口24a、第2吐水口25a的清洗水w在盆部11的表面12上流动。此时,探测部41从静电电容c0探测出静电电容c1。
76.在接下来的时刻t11,为了结束向盆部11的清洗水w的供给,清洗水供给部30从打开状态切换到关闭状态。另外,从清洗水供给部30关闭的时刻t11到对大便器10的堵塞状态的判定结束为止,供给控制部45禁止清洗水供给部30的打开动作。之后,从时刻t11到时刻t12为止,伴随电极(探测区域42)周围的清洗水w的体积减少,从静电电容c1逐渐减小至静电电容c0。
77.在时刻t12,供给控制部45的堵塞判定部46对在大便器10清洗后被检测出的静电电容ca与在大便器10的清洗中被检测出的最大值的静电电容cb之差是否充分进行运算(是否阈值cx以上),由此对大便器10是否发生了堵塞进行判定(|ca-cb|≥cx)。阈值cx成为用于对大便器10的堵塞进行判定的值,预先储存在供给控制部45的存储部(未图示)。当大便器10并未发生堵塞时,时刻t12的静电电容ca=c0与时刻t11的静电电容cb=c1之差的绝对值成为阈值cx以上(|c0-c1|≥cx)。
78.接下来,参照图7(b)对大便器10发生堵塞的情况进行说明。
79.当大便器10发生堵塞时,清洗水w的水面上升至盆部11的限界水位s3(参照图2(a)、图5)。从而,如图7(b)所示,在从时刻t11到时刻t12期间,没有静电电容c的变化,探测部41继续维持静电电容(ca=cb=c1)。由此,供给控制部45的堵塞判定部46能够判定出大便器10发生了堵塞。
80.由于在图7(b)所示的状态中大便器10的清洗中的静电电容cb与清洗后的静电电容ca之间没有变化,因此是大便器10完全堵塞的状态。供给控制部45的堵塞判定部46例如设定基于覆盖探测区域42的清洗水w量的阈值cx,由此能够判定出大便器10的半堵塞状态。
81.接下来,参照图7(c)对清洗水供给部30发生故障的情况进行说明。
82.当清洗水供给部30发生止水不良等故障时,在从时刻t12到时刻t13期间,从清洗水供给部30漏向清洗水通路22的清洗水w积存在第1分支通路24(参照图4)。之后,在从时刻t13到时刻t14期间,积存在第1分支通路24的清洗水w从第1吐水口24a朝着盆部11的底部11a在铅直方向上滴落(参照图3(b))。
83.像这样,当清洗水供给部30发生故障时,在对大便器10的堵塞进行判定的时刻t12之后,断续发生静电电容c的变化。供给控制部45的故障判定部48检测出该静电电容c的变化,由此判定为清洗水供给部30发生了故障。
84.具体而言,供给控制部45的堵塞判定部46运算出时刻t12的静电电容ca=c0与时刻t11的静电电容cb=c1之差的绝对值成为cx以上(|c0-c1|≥cx),由此判定为大便器10并未发生堵塞。
85.之后,供给控制部45的故障判定部48运算出在此之后的时刻t14的静电电容cc=c2与从时刻t12到时刻t13为止的静电电容c0之差的绝对值成为阈值cy以上(|c2-c0|≥cy),由此判定为清洗水供给部30发生了故障。阈值cy被设定为用于判定清洗水供给部30是否发生了止水不良等故障的值,预先储存在供给控制部45的存储部(未图示)。阈值cy成为小于当对大便器10的堵塞进行判定时的阈值cx的值。
86.像这样,根据通过由静电电容传感器所构成的探测部41探测出的静电电容c的经时变化,供给控制部45能够对大便器10的堵塞状态及清洗水供给部30的故障进行判定。
87.图8是表示本发明的第2变形例所涉及的冲厕装置的与图3(b)相同的剖视图。本实施方式中,以具有第1吐水口24a、第2吐水口25a这2个吐水口的大便器10为例进行了说明。但是,本发明并不局限于此,例如图8所示的第2变形例那样,还可以是具有1个吐水口240的大便器100。即,探测区域420还可以设置在从吐水口240在铅直方向上流动的清洗水w所通过的位置。
88.图9是表示本发明的第3变形例所涉及的水箱式冲厕装置的结构的模式图。在上述的实施方式中,以将清洗水供给部30作为设置于供水管路21的冲洗阀的情况为例进行了说明。但是,本发明并不局限于此,例如图9所示的第3变形例那样,清洗水供给部300还可以具有设置在水箱200内部的挡板阀。
89.在上述的实施方式中,以将探测区域42设置在第1吐水口24a下方的情况为例进行了说明。但是,本发明并不局限于此,例如还可以在第2吐水口25a下方设置探测区域。
90.另外,在上述的实施方式中,将以下情况为例进行了说明,即当在大便器10的堵塞判定之后清洗水w被探测到1次时,判定为清洗水供给部30发生了故障。但是,本发明并不局
限于此,例如还可以在清洗水w被探测到多次时,判定为清洗水供给部30发生了故障。
91.另外,在上述的实施方式中,将探测部41对盆部11内的清洗水w的水量进行探测的情况为例进行了说明。但是,本发明并不局限于此,例如供给控制部45还可以根据由探测部41探测出的在盆部11内流动的清洗水w的流速对大便器10的堵塞及清洗水供给部30的故障进行判定。当大便器10发生堵塞时,由于清洗水w积存在盆部11内,因此清洗水w的流速较慢。另一方面,当清洗水供给部30发生故障时,由于清洗水w从第1吐水口24a流向盆部11的底部11a,因此流速较快。
92.另外,在上述的实施方式中,以在大便器10的堵塞判定之后进行清洗水供给部30的故障判定的情况为例进行了说明。但是,本发明并不局限于此,例如还可以仅进行大便器10的堵塞判定。即,还可以根据需要进行清洗水供给部30的故障判定。
93.作为基于以上说明的实施方式的冲厕装置,例如可考虑以下所述的形态的冲厕装置。
94.第1形态如下,具备:探测部,探测在大便器的盆部的表面上的比满水位更低且比封水位更高的位置是否存在清洗水;及控制部,根据在设置于向所述盆部吐出清洗水的流路的清洗水供给部关闭之后的所述探测部的探测结果,对所述大便器的堵塞状态进行判定,所述探测部的探测区域是在所述盆部的所述表面上的所述清洗水供给部关闭之后从所述流路的吐水口朝着所述盆部的底部在铅直方向上流动的清洗水所通过的位置。
95.根据第1形态,探测区域设置在盆部的表面上的污物难以附着或已附着的污物容易被清洗水冲落的位置。从而,能够高精度地对大便器的堵塞进行判定。另外,通过将探测区域设置在这样的位置,例如在大便器并未被使用的待机中,即使不设置新的探测部,通过探测部也能够对清洗水供给部的止水不良等故障进行监控。
96.第2形态如下,在第1形态中,根据在所述盆部的所述表面上流动的清洗水的水量或流速,所述探测部将不同的探测结果输出至所述控制部。
97.当大便器发生堵塞时,处于大便器内积存有大量清洗水的状态,因此探测区域内的清洗水的水量较多,流速较慢。另一方面,当清洗水供给部发生故障时,处于少量清洗水从吐水口在铅直方向上流动的状态,因此探测区域内的清洗水的水量较少。另外,这这样的情况下,与大量清洗水积存在大便器内的状态相比流速更快。根据第2形态,控制部能够判定出大便器的堵塞为何等程度。此外,能够高精度地对大便器的堵塞及清洗水供给部的故障进行判定。
98.第3形态如下,在第1或第2形态中,根据从所述探测部输出的探测结果的经时变化,所述控制部对所述大便器的堵塞状态及所述清洗水供给部的故障进行判定。
99.根据第3形态,当大便器发生堵塞时,处于大量清洗水积存在大便器内的状态,因此探测结果呈一定或者发生些许变化。另一方面,当清洗水供给部30发生故障时,处于少量清洗水从吐水口断续流动的状态,因此探测结果发生变化。从而,控制部能够高精度地对大便器的堵塞状态及清洗水供给部的故障状态进行判定。
100.第4形态如下,在第1~第3的任意一个形态中,所述探测部的探测区域的宽度大于在所述铅直方向上流动的清洗水的宽度。
101.另外,第5形态如下,在第4形态中,所述探测区域的宽度沿着所述盆部的所述表面成为14mm以上。
102.根据第4、第5形态,能够进一步加大大便器发生堵塞时及清洗水供给部发生故障时的各自探测区域的清洗水的水量差。从而,能够更加高精度地对大便器的堵塞及清洗水供给部的故障进行判定。
103.第6形态如下,在第1~第5的任意一个形态中,所述探测部的探测区域设置在所述盆部的所述表面的倾斜角度相对于铅直方向小于45度的位置。
104.根据第6形态,由于将盆部的表面上的污物难以附着的急倾斜面作为探测区域,因此能够抑制对排泄物等污物进行误探测。另外,能够进一步加大大便器发生堵塞时及清洗水供给部发生故障时的各自探测区域的清洗水的流速差。从而,能够更加高精度地对大便器的堵塞及清洗水供给部的故障进行判定。
105.以上,对本发明的实施方式进行了说明。但是,本发明并不局限于上述的记述。关于前述的实施方式,只要具备本发明的特征,则本领域技术人员适当追加设计变更的技术也包含在本发明的范围内。例如,冲厕装置40等所具备的各要素的形状、尺寸、材质、配置、设置方式等并不限定于例示的内容,而是可进行适当变更。另外,只要技术上可行,则可对前述的各实施方式所具备的各要素进行组合,组合这些后的技术只要包含本发明的特征,则也包含在本发明的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1