一种智能清淤机器人的制作方法
1.本实用新型涉及排水系统清淤设备领域,尤其是涉及一种智能清淤机器人。
背景技术:
2.随着城市建设进一步加快,城市扩容相应的增加了地下排水系统的建设。然而建设的同时,由于突发极端降雨导致的城市内涝却凸显排水系统的维护工作的重要。排水系统包括排水管网、渠箱、泵站等。排水系统的维护中管道清淤是重要部分,即是将管道进行疏通,清理管道里面的淤泥,保持长期畅通。居民在排水管道中排入的大量杂物和基建工地的水泥砂发生沉淀、淤积都会造成管道淤堵。不定期进行管道清淤、疏通就会造成管网径流剧减甚至堵塞。必须定期清理排水管道,对于保护城市环境、避免污染、维护市容市貌、提高人民生活质量,有着极其重要的意义。得益于技术的发展,目前管道清淤工作基本上通过各类的机器人代替人工去完成清淤疏浚工作。
3.目前的清淤机器人大部分是驱动履带固定在机体下方,与机体垂直或成一定倾角,这样履带能够与管道内壁贴合,增强履带的抓壁力帮助机器人驱动。但由于城市排水系统的复杂性,往往一个区域需要适应渠箱、泵站及不同管径的清淤机器人,单一型号机器人如果履带与清淤地点内壁不贴合,会造成行走过程中履带受压脱落,给设备运行带来极大风险。因此,这种固定履带的机器人无法满足实际需要。
4.因此研发一种操作简单、即适合渠箱又适合不同管径排水管的智能清淤机器人成了市场的迫切需求。
技术实现要素:
5.本实用新型的目的在于研发一种操作简单、即适合渠箱又适合不同管径排水管的智能清淤机器人,具体技术方案如下:
6.本实用新型提供了一种智能清淤机器人,包括行走单元,与行走单元固定连接的悬架系统,及通过机体固定架固定连接于悬架系统上的机身本体,其中行走单元包括履带、驱动履带转动的驱动系统、及支撑履带轮轴的支撑板,支撑板上设置有与悬挂系统固定连接的履带横梁;悬挂系统包括与支撑板固定连接的角度调整机构及与履带横梁固定连接的支撑梁,悬挂系统还包括与支撑梁铰接连接的支撑架,机身本体还包括与机体固定架滑动连接的淤泥铲吸系统及与行走单元的驱动系统电性连接的控制系统。组装好后的机器人从渠箱等水平应用场景去到排污管等内壁为弧形的应用场景时,通过控制机器人悬架系统的角度调整机构,角度调整机构带动履带跟随支撑梁旋转,让履带与机身竖直切面产生夹角,最终实现履带与排污管内壁贴合,这样的状态下履带的受力均匀,不易出现机器人行进过程中履带脱落的问题,也使得机器人具有适应不同不同排污管径的能力。
7.优选的,支撑架为倒v字形结构,支撑架两端分别铰接连接一支撑梁,支撑梁通过u形卡接结构与履带横梁固定连接,所述角度调整机构为两个设置在两支撑梁间且对向设置的结构,角度调整机构还包括与支撑梁铰接连接的第一伸缩杆,与第一伸缩杆另一端铰接
连接的倾斜臂,其中倾斜臂为l字形结构,倾斜臂的横向段与支撑梁铰接连接,倾斜臂的竖向段与第一伸缩杆铰接连接,倾斜臂的横向段还与履带的支撑板固定连接。该结构中,通过u形卡接结构及角度调整机构实现行走单元与悬架系统的固定连接,结构稳定,同时通过悬架系统的支撑架与支撑梁铰接及角度调整机构与支撑梁铰接实现履带角度调整。这种通过悬架系统部分零件的转动实现某行走的角度调整,比单纯行走单元与悬架系统铰接结构更稳定。组装好后,两支撑梁分别与履带横梁固定连接的同时与一第一伸缩杆的固定端铰接连接,两第一伸缩杆的活动端均铰接倾斜臂,此时由于两支撑梁的轴向距离由支撑架固定,同时控制伸缩杆的伸长或缩短既可带动倾斜臂旋转,由于倾斜臂的另一端与履带支撑板固定,对应履带与机身竖直切面形成的角度发生变化,实际的效果是履带贴合排污管道的弧形内壁。这种调节结构的结构简单,操作便捷,履带与机体形成的夹角变化区间大,使机器人适合排水系统内多种应用场景的清淤工作。值得说明的是,支撑架为倒v字形结构可以增加履带与机体的距离,进而加大履带角度调节的行程。
8.优选的,支撑梁为圆形管状结构,支撑架两端设置有与支撑梁外径匹配的第一通孔,支撑梁穿过第一通孔并与支撑架铰接连接。圆形的管状支撑梁与支撑架的第一通孔连接使得悬架结构更简单,省去了连接件组装更方便。同时通过圆形的管状支撑梁在与倾斜臂铰接连接时结构更简单,进一步简化了清淤机器人的悬架系统结构。铰接连接保证了相连接的两个部件在其中一个静止的情况下另一个围绕一个轴线进行旋转,可以很好地帮助悬架系统实现履带的角度调整。
9.优选的,倾斜臂的横向段设置有与支撑梁外径匹配的第二通孔,支撑梁穿过第二通孔与倾斜臂铰接连接。支撑梁插接入倾斜臂的第二通孔内,倾斜臂就以支撑梁为支撑,并围绕支撑梁旋转,是结构简单的角度调整结构。
10.优选的,第一伸缩杆固定端通过套接于支撑梁的拉环与支撑梁铰接连接,拉环包括与支撑梁套接的套孔及与第一伸缩杆固定端通过轴销铰接的栓孔。通过套孔套接及通过栓孔与轴销的铰接都方便设备的组装,提高清淤机器人悬架结构拆装的灵活性。
11.优选的,支撑梁两端分别通过两个u形卡接结构与履带支撑板上的两个履带支撑梁固定连接,u形卡接结构包括具有4个螺孔的的卡板,及与卡板通过螺丝可拆卸连接的两个u形卡。支撑梁两端都通过u形卡接结构与履带支撑板两端的履带支撑梁固定连接,可以保证履带与支撑梁之间不发生偏转形成稳定的整体,进而履带带动支撑梁在第一通孔内发生旋转,最终履带相对机身产生偏转。
12.优选的,支撑架至少为2个,且相互平行可旋转接于支撑梁上。两个以上的支撑架与两个支撑梁使智能清淤机器人的悬架系统整体形成矩形结构,增加机器人的悬架系统的稳定性。
13.优选的,第一伸缩杆为液压伸缩杆。液压伸缩杆的伸缩推力更强,适合不同重量型号机器人的使用,使用液压杆时只要在液压杆的液压缸两端与液压控制器通过液压管连接即可,液压系统是清淤机器人上常见的动力单元,直接使用增加清淤机器人的悬架系统兼容性。
14.优选的,淤泥铲吸系统包括位于机身本体前端的前铲,及固定于机体固定架上的泥浆泵,泥浆泵通过吸泥管将吸泥口前伸到前铲上方。行进过程中,淤泥堆积在前铲处,清淤机器人将淤泥通过连接有泥浆泵的吸泥口吸入,经过吸泥泵加压由排污口连接排污管排
出,达到清淤效果。
15.优选的,前铲上方设置有喷水枪,喷水枪通过软管与水泵连接,水泵固定于机体固定架上。水泵吸入机身周围的水增压从喷水枪处喷出,循环对阻挡清淤机器人前行的固化淤泥进行冲刷,增强清淤效果。
16.优选的,喷水枪上设置多个喷头,喷头喷射水流的方向为朝机器人行进方向,但角度不同,可以依据工况需要选择安装或开启某些角度的喷头,或更换喷头的口径,进而产生不同的喷射力来冲刷堆积的淤泥。
17.优选的,机体固定架包括上梁及与上梁固定连接的前梁,前铲通过套管结构与前梁滑动连接,前梁还设置有第二伸缩杆,第二伸缩杆的固部与前梁固定连接,第二伸缩杆的活动部与前铲固定连接。第二伸缩杆控制前铲沿前梁上下滑动,以越过排污管内的障碍物,如接口处的凸起,同时前铲的上下滑动可以产生刮铲动作,可以更加方便清除硬化淤泥块。套管结构的连接方式更为灵活,除了可以使得前铲可以在前梁上下滑动外还方便在不同场景要求下更换前铲,例如在渠箱施工前更换平底前铲,到管道等弧形内壁施工前更换弧形底部的前铲,更有利于机器人实施清淤工作。
18.优选的,前铲的下边缘为弧形结构。弧形结构可以使前铲适应排污管内壁,使清淤机器人的清淤更彻底。
19.优选的,控制系统包括电气控制单元、液压控制单元及接线单元,各单元均通过罐状密封装置固定安装于机体固定架上。这种清淤机器人的控制系统采用单元式整体密封安装,各单元接好测试完毕后固定在机器人机体即可,检修时也只需取下相关单元的密封装置,处理完毕后安装回去即可,而无需牵涉到机器人的其他部件。
20.优选的,罐状密封装置包括具有容置腔的罐体,罐体边缘设置有法兰结构,罐状密封装置还包括与法兰结构匹配的罐盖,罐盖上设置有通气阀及接线孔,罐盖与罐体贴合面固定连接安装架,安装架上固定连接控制元件。每次安装好密封装置后通过充气阀内充入压缩空气,关闭充气阀,在阀口连接压力表,再开启充气阀,静置一段时间观察压力表的数值是否减小即可推测出密封装置是否存在漏气,水下机器人的控制元件较多例如具有水下摄像头、声呐、灯光等设备的控制器,成本高昂,所以机器人每次检修时都要对密封装置的气密性进行确认,在罐盖上增设充气阀使得气密形检测更为方便。
21.优选的,机体固定架上固定安装有吊装立柱,立柱设置有吊环。立柱及吊环方便清淤机器人的运输及吊装进出工作排污管。
22.本实用新型的有益效果是:本实用新型提供的智能清淤机器人能够根据待清淤排污管管径的不同调结履带与机体的夹角,最终调节到履带与排污管内管壁贴合,调节完后该机器人在排污管内行进时,履带的受压是均匀的,不会产生履带脱落的故障。同时本智能清淤机器人各功能单元结构简单,操作简便,功能强大,完全满足市场的需要。
附图说明
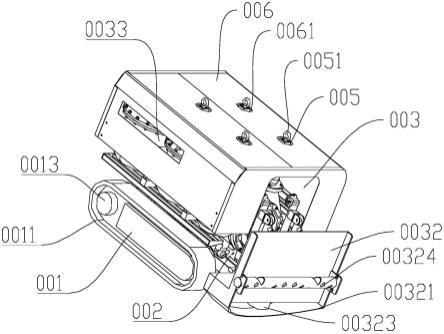
23.图1为本实用新型一种智能清淤机器人的结构示意图;
24.图2为本实用新型一种智能清淤机器人的零件拆分图一;
25.图3为本实用新型一种智能清淤机器人的零件拆分图二;
26.图4为本实用新型一种智能清淤机器人的悬架系统的结构示意图;
27.图5为本实用新型一种智能清淤机器人的悬架系统的零件拆分图一;
28.图6为本实用新型一种智能清淤机器人的悬架系统的零件拆分图二;
29.图7为本实用新型一种智能清淤机器人的履带角度调整后的结构示意图;
30.图8为本实用新型一种智能清淤机器人的罐状密封装置的结构示意图;
31.图9为本实用新型一种智能清淤机器人的罐状密封装置的零件拆分图。
具体实施方式
32.以下通过特定的具体实例并结合附图说明本实用新型的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本实用新型的其它优点与功效。本实用新型亦可通过其它不同的具体实例加以施行或应用,本说明书中的各项细节亦可基于不同观点与应用,在不背离本实用新型的精神下进行各种修饰与变更。
33.本实用新型提供了一种智能清淤机器人,该机器人有以下结构特点:
34.如图1至图9所示,本智能清淤机器人包括行走单元001,与行走单元001固定连接的悬架系统002,及通过机体固定架0031固定连接于悬架系统002上的机身本体003,其中行走单元001包括一对履带0011、驱动履带0011转动的驱动系统0012、及支撑履带0011的轮轴0013的支撑板0014,支撑板0014上设置有与悬挂系统002铰接连接的履带横梁0015,悬挂系统002包括与履带横梁0015固定连接的支撑梁0022,以及与支撑梁0022铰接连接的支撑架0023。悬挂系统002还包括与支撑板0014固定连接的角度调整机构0021,角度调整机构0021固定在一对履带0011的支撑板0014之间,机身本体003通过机体固定架0031固定连接于支撑架0023的上方,角度调整机构0021用于调整机身本体003与履带0011之间的夹角,机身本体003还包括与机体固定架0031滑动连接的淤泥铲吸系统0032,机身本体003还包括控制行走单元001的驱动系统0012的控制系统0033。
35.进一步地,支撑架0023为倒v字形结构,支撑架0023两端分别铰接连接一支撑梁0022,支撑梁0022通过u形卡接结构0024与履带横梁0015固定连接,其中,角度调整机构0021为两个设置在两支撑梁0022间且对向设置的伸缩推拉结构,伸缩推拉结构包括一端与支撑梁0022铰接连接的第一伸缩杆0025,以及与第一伸缩杆0025另一端铰接连接的倾斜臂0026,其中倾斜臂0026为l字形结构,倾斜臂0026的横向段与支撑梁0022铰接连接,倾斜臂0026的竖向段向上伸出并与第一伸缩杆0025铰接连接,倾斜臂0026的横向段还与履带0011的支撑板0014固定连接。
36.进一步地,支撑梁0022为圆形管状结构,支撑架0023两端设置有与支撑梁0022外径匹配的第一通孔0026,支撑梁0022穿过第一通孔0026并与支撑架铰接连接。
37.进一步地,倾斜臂0026的横向段设置有与支撑梁0022外径匹配的第二通孔0027,支撑梁0022穿过第二通孔0027与倾斜臂0026铰接连接。
38.进一步地,第一伸缩杆0025固定端通过套接于支撑梁的拉环0028与支撑梁0022铰接连接,拉环0028包括与支撑梁0022套接的套孔00291及与第一伸缩杆0025固定端通过轴销铰接的栓孔00292。
39.进一步地,支撑梁0022两端分别通过两个u形卡接结构0024与履带支撑板0014上的两个履带横梁0015固定连接,u形卡接结构0024包括具有4个螺孔的的卡板00241,及与卡板00241通过螺丝可拆卸连接的两个u形卡00242。
40.进一步地,支撑架0023至少为2个,且相互平行铰接连接于支撑梁0022上。
41.进一步地,第一伸缩杆0025为液压伸缩杆。在角度调整机构0021的带动下,履带0011与机身本体003的竖直切面夹角a最大可到36度。
42.进一步地,淤泥铲吸系统0032包括位于机身本体003前端的前铲00321,及固定于机体固定架0031上的泥浆泵00322,泥浆泵00322通过吸泥管00323将吸泥口前伸到前铲00321上方。
43.进一步地,前铲00321上方设置有喷水枪00324,喷水枪00324通过软管(未示出)与水泵00325连接,水泵00325固定于机体固定架0031上。
44.进一步地,喷水枪00324上设置多个喷头007,喷头喷射水流的方向为朝机器人行进方向,但角度不同。
45.进一步地,机体固定架0031包括上梁00328及与上梁00328固定连接的前梁00327,前铲00321通过套管结构00326与前梁00327滑动连接,前梁00327还设置有第二伸缩杆00329,第二伸缩杆00329的固部与前梁00327固定连接,第二伸缩杆00329的活动部与前铲00321固定连接。
46.进一步地,前铲00321的下边缘为弧形结构。
47.进一步地,控制系统0033包括电气控制单元0034、液压控制单元0035及接线单元0036,各单元均通过罐状密封装置004固定安装于机体固定架0031上。
48.进一步地,罐状密封装置004包括具有容置腔0048的罐体0041,罐体0041边缘设置有法兰结构0042,罐状密封装置004还包括与法兰结构0042匹配的罐盖0043,罐盖0043上设置有通气阀0044及接线孔0045,罐盖0043与罐体贴合面固定连接安装架0046,安装架0046上固定连接控制元件0047。
49.进一步地,罐体0041上还设置有密封垫0049.
50.进一步地,机体固定架0031上固定安装有吊装立柱005,立柱设置有吊环0051,立柱藏于外壳006内,吊环0051通过外壳006的圆孔0061露出。
51.应当理解的是,本实用新型中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本实用新型范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。
52.最后所应当说明的是,以上实施例仅用以说明本实用新型的技术方案而非对本实用新型保护范围的限制,尽管参照较佳实施例对本实用新型作了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1