轮胎式管道爬行机器人的制作方法
1.本实用新型涉及特种机器人技术领域,具体涉及一种轮胎式管道爬行机器人。
背景技术:
2.管道机器人是检测市政管网的重要工具,可完成管道勘测、修复、维护等工作,保证城市管网的健康运行。管道机器人不但可以节省人力,还可以提高检测、修复等工作效率。目前的管道机器人,无论是履带式还是轮胎式,很少能够调整管道机器人的两侧角度以适应管道的内径,实现平稳的管内移动。
技术实现要素:
3.鉴于以上问题,本实用新型的主要目的是提供一种可调整两侧角度、动力足、质量轻的轮胎式管道爬行机器人。
4.本实用新型的目的是以下述方式实现的:
5.一种轮胎式管道爬行机器人,其中,包括:
6.厢体,所述厢体的下端连接有剪刀式升降台,厢体包含前盖和后盖,前盖设置有摄像模组,后盖设置有一对接线头;
7.一对照明模组,所述照明模组分别设置在厢体的两侧,并且内含一个平面远光灯与两颗近光灯;
8.摄像模组,所述摄像模组设置在厢体的前盖上;
9.剪刀式升降台,所述剪刀式升降台设置在金属基座板上,并与厢体的底部相连接;
10.金属基座板,所述金属基座板两侧有折弯成90
°
的侧板,侧板有两个滑槽,其中一个滑槽通过螺丝与剪刀式升降台的中心轴相连,另一个滑槽通过螺丝与厢体相连;
11.两对电机,所述电机是减速箱电机,分别设置在两对金属侧板的内测;
12.两对轮胎,所述轮胎每对分别设置在每对金属侧板的中间,每个轮胎都与电机的输出轴相连;
13.一对接线头,所述接线头一同设置在厢体的后盖上;
14.两对金属侧板,每对金属侧板分别位于金属基座板的两侧,且金属侧板通过合页与所述金属基座板对应的一侧相连,每对金属侧板分别通过连接轴夹着前后一对轮胎。
15.较佳地,厢体通过金属螺丝与金属基座板的折弯侧板的滑槽相连,管道爬行机器人在升降过程中,厢体可沿着滑槽平稳上下移动。
16.较佳地,照明模组带有金属外壳,每对照明模组通过螺丝固定在厢体的两侧,远光灯包含平面镜、灯杯以及灯珠;近光灯包含灯罩以及灯珠。
17.较佳地,摄像模组包含玻璃罩,高清摄像头位于玻璃罩内,可以较好的保护摄像头。
18.较佳地,四个电机通过电线贯穿金属基座板,并与厢体底部的接线头相连。
19.较佳地,四个轮胎通过四个连接轴分别设置在每对的金属侧板的中间。
20.本实用新型的有益效果:
21.1、本实用新型两侧金属侧板可通过合页实现角度调整,可根据不同管径调整不同角度,使得管道机器人的轮胎在管内移动时更加贴合管壁,实现平稳移动;
22.2、本实用新型可以根据不同的管径,调整管道机器人的高度,使得照明模组能更加清晰全面的探测管内环境;
23.3、本实用新型重量轻,可以轻松的放入管网中。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
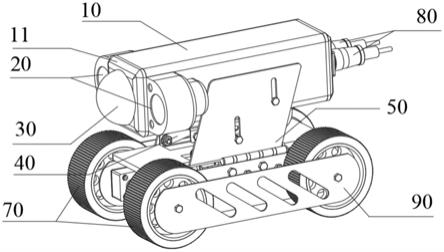
25.图1是本实用新型的结构示意图;
26.图2是本实用新型的主视图;
27.图3是本实用新型的左视图;
28.图4是本实用新型的俯视图;
29.图5是本实用新型的仰视图;
30.图中标记说明:厢体10、前盖11、后盖12、照明模组20、远光灯21、近光灯22、摄像模组30、剪刀式升降台40、金属基座板50、电机60、轮胎70、接线头80、金属侧板90。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.参考图1至图5所示的一种履带式管道爬行机器人,包括厢体10、一对照明模组20、摄像模组30、剪刀式升降台40、金属基座板50、四个电机60、四个轮胎70、一对接线头80、两对金属侧板90,所述厢体10为搭载功能操作设备,内置主电路以及若干电线,所述厢体10的下端连接有剪刀式升降台40的顶部,所述照明模组20设置在厢体10两侧,且所述照明模组可实现远近光灯的照明,所述摄像模组30设置在所述厢体10的前盖11上,所述剪刀式升降台40设置在金属基座板50上,可实现厢体的上下移动,所述金属基座板50两侧有折弯成90
°
的侧板,侧板有两个滑槽,其中一个滑槽通过螺丝与剪刀式升降台40的中心轴相连,另一个滑槽通过螺丝与厢体10相连,所述电机60为减速电机,共有四个,分别设置在两对金属侧板90的内测,所述轮胎70共有四个,每对轮胎位于每对金属侧板90的中间,并且每个轮胎70与对应电机的输出轴相连,所述接线头80有一对,设置在厢体10的后盖12上,分别是输出端和输入端,实现厢体10内主电路板与电脑端的信号传输与反馈,所述金属侧板90共有两对,每对金属侧板90分别位于金属基座板50的两侧,且金属侧板90通过合页与金属基座板50对应的一侧相连,每对金属侧板90分别通过连接轴夹着前后一对轮胎70。
33.在本实施例中,厢体里的控制电路接收上位机控制指令,电机开始运转,电机带动
轮胎进行前进、后退、左转、右转、暂停等动作,高清摄像头2能够进行360度旋转,提供全方位的高清录像和图片。
34.在本实施例中,照明模组带有金属外壳,每对照明模组通过螺丝固定在厢体的两侧,远光灯包含平面镜、灯杯以及灯珠;近光灯包含灯罩以及灯珠。
35.在本实施例中,厢体通过金属螺丝与金属基座板的折弯侧板的滑槽相连,管道爬行机器人在升降过程中,厢体可沿着滑槽平稳上下移动。
36.在本实施例中,两对金属侧板90可以依据实际作业管径的大小调整角度,使得轮胎更加贴合管壁。
37.在本实施例中,所述高清摄像头50为2自由度云台的高清摄像头,且所述高清摄像头50采用400万像素以上的彩色摄像头。
38.该轮胎式管道爬行机器人采用轮胎式爬行方式,金属侧板90可调节角度,使轮胎70与管道内壁面接触,四个电机60驱动轮胎行走70,动力充足,适合复杂的管道路况,行走能走直线,照明模组20可实现远近光灯照明,照明面积大,极大保证拍摄质量,及时检测出管道内部隐患。
39.以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.轮胎式管道爬行机器人,其特征在于,包括:厢体(10),所述厢体(10)的下端连接有剪刀式升降台(40),所述厢体(10)包含前盖(11)和后盖(12),前盖(11)设置有摄像模组(30),后盖(12)设置有一对接线头(80);一对照明模组(20),所述照明模组(20)分别设置在所述厢体(10)的两侧,所述照明模组(20)分别内含一个平面远光灯(21)与两颗近光灯(22);摄像模组(30),所述摄像模组(30)设置在所述厢体(10)的前盖(11)上,所述摄像模组(30)内含在玻璃罩内;剪刀式升降台(40),所述剪刀式升降台(40)设置在金属基座板(50)上,并与厢体(10)的底部相连接;金属基座板(50),所述金属基座板(50)两侧有折弯成90
°
的侧板,侧板有两个滑槽,其中一个滑槽通过螺丝与剪刀式升降台(40)的中心轴相连,另一个滑槽通过螺丝与厢体(10)相连;两对电机(60),所述电机(60)是减速箱电机,分别设置在两对金属侧板(90)的内测;两对轮胎(70),所述轮胎(70)每对分别设置在每对金属侧板(90)的中间,所述轮胎(70)每个都与电机(60)的输出轴相连;一对接线头(80),所述接线头(80)一同设置在厢体(10)的后盖(12)上;两对金属侧板(90),每对金属侧板(90)分别位于所述金属基座板(50)的两侧,且所述金属侧板(90)通过合页与所述金属基座板(50)对应的一侧相连,每对金属侧板(90)分别通过连接轴夹着前后一对轮胎(70)。2.根据权利要求1所述的轮胎式管道爬行机器人,其特征在于,所述厢体(10)通过金属螺丝与所述金属基座板(50)的折弯侧板的滑槽相连,管道爬行机器人在升降过程中,所述厢体(10)可沿着滑槽平稳上下移动。3.根据权利要求1所述的轮胎式管道爬行机器人,其特征在于,所述照明模组(20)带有金属外壳,每对照明模组(20)通过螺丝固定在厢体(10)的两侧,所述远光灯(21)与近光灯(22)位于所述照明模组(20)的前端,其中,远光灯(21)包含平面镜、灯杯以及灯珠;近光灯(22)包含灯罩以及灯珠。4.根据权利要求1所述的轮胎式管道爬行机器人,其特征在于,所述摄像模组(30)包含玻璃罩,高清摄像头位于玻璃罩内。5.根据权利要求1所述的轮胎式管道爬行机器人,其特征在于,所述四个电机(60)通过电线贯穿所述金属基座板(50),并与所述厢体(10)底部的接线头相连。6.根据权利要求1所述的轮胎式管道爬行机器人,其特征在于,所述轮胎(70)通过四个连接轴分别设置在每对的金属侧板(90)的中间。
技术总结
本实用新型公开了一种轮胎式管道爬行机器人,包括厢体,所述厢体的下端连接有剪刀式升降台;一对照明模组,所述照明模组分别设置在所述厢体的两侧;摄像模组,所述摄像模组设置在所述厢体的前盖上;剪刀式升降台,所述剪刀式升降台设置在金属基座板上;金属基座板,所述金属基座板两侧有折弯成90
技术研发人员:李锦祥 曾阿锋 张致炜 杨少君 赵云盟
受保护的技术使用者:李锦祥
技术研发日:2021.07.05
技术公布日:2021/12/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1