一种步行式挖掘机的制作方法
1.本实用新型涉及挖掘机技术领域,具体为一种步行式挖掘机。
背景技术:
2.水泥生产加工已经是非常成熟的产业,在对水泥生产时会将堆积的水泥材料挖运至指定位置,在次过程中则会用到挖掘机,现有的挖掘机的车轮大多数都是轮胎式或者履带式,由于在此工作中地面都是水泥的粉状颗粒物,而且水泥的粉状颗粒物都是很厚的一层,但是现有的挖掘机在较厚的水泥的粉状颗粒物中不便行走,在水泥的粉状颗粒物中行走时会出现打滑的问题,而且由于水泥的粉状颗粒物的堆放会导致挖掘机的工作面存在倾斜度,但是现有的挖掘机不能对底盘的角度进行调节,从而会导致挖掘装置无法在较为合适的角度进行工作,因此急需一种步行式挖掘机来解决上述问题。
3.上述的现有技术方案存在以下缺陷:现有的挖掘机不能对底盘的角度进行调节,而且在较厚的水泥的粉状颗粒物中不便行走。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供一种步行式挖掘机,其具有的优点是便于对底盘的水平角度进行调节,可以使得挖掘装置处于最佳工作状态,而且与现有技术相比该装置便于在粉状物中行走,采用连接杆与支撑脚对该装置进行支撑,避免了传统的挖掘机的履带中因粉尘填充其内不便行走的问题,也比有效的避免了传统挖掘机轮子或者履带与工作地面因粉状颗粒过多导致打滑的问题。
5.本实用新型的上述目的是通过以下技术方案得以实现的:
6.一种步行式挖掘机,包括底盘,所述底盘上侧设有回转装置,所述回转装置上侧设有挖掘装置,所述底盘的下部的两侧均设有行走组件,所述行走组件包括支撑脚,所述支撑脚与所述底盘之间连接有若干连接杆,所述连接杆一端与所述支撑脚固定连接,所述连接杆另一端与所述底盘铰接,所述支撑脚与所述底盘之间设有第一液压缸,所述第一液压缸的两端分别铰接于所述支撑脚与所述底盘。
7.通过采用上述技术方案,设置的第一液压缸、连接杆与支撑脚对该装置起到支撑座的作用,通过控制第一液压缸伸缩可以使得连接杆绕设自身与底盘的铰接处转动,同时支撑脚随着连接杆转动而摆动,在对底盘的水平角度进行调节时,控制一侧的行走组件中的第一液压缸伸缩即可使得底盘的水平角度发生变化,从而可以使得挖掘装置处于最佳工作状态,当同时控制第一液压缸伸长或者缩短时可以对底盘的高度进行调节,在该装置进行行走时,通过设置的挖掘装置与两个行走组件配合使用即可,在行走时挖掘装置始终对该装置进行支撑,使得靠近挖掘装置一侧的支撑脚处于置空状态,然后通过控制挖掘装置运动,使得挖掘装置对底座产生水平方向的分力,在挖掘装置运动的同时,通过控制回转装置以一定的角度往复转动,在回转装置转动时会会使得底盘随之一起运动,进而使得支撑该装置的支撑脚发生摆动,从而会使得该装置的底盘会在水平方向产生运动,将底盘运动
至合适位置后控制挖掘装置使得位于空中的支撑脚落地对该装置支撑即可,与现有技术相比该装置便于在粉状物中行走,采用连接杆与支撑脚对该装置进行支撑,避免了传统的挖掘机的履带中因粉尘填充其内不便行走的问题,也比有效的避免了传统挖掘机轮子或者履带与工作地面因粉状颗粒过多导致打滑的问题。
8.本实用新型在一较佳示例中可以进一步配置为:所述回转装置包括内齿轮,所述内齿轮与所述底盘的上侧固定连接,所述内齿轮外侧套设有支撑套且两者转动连接,所述支撑套上侧固定连接有安装座,所述内齿轮啮合有驱动齿轮,所述驱动齿轮的上侧设有液压马达,所述液压马达位于所述安装座的上侧且与其固定连接,所述液压马达的输出轴贯穿所述安装座并固定连接于所述驱动齿轮的上端,所述液压马达的输出轴与安装座转动连接。
9.通过采用上述技术方案,通过控制液压马达转动可以带动驱动齿轮转动,由于底盘用于承受该装置自身的重力,因此驱动齿轮转动会在内齿轮的作用力下带动安装座转动,从而可以对该装置进行转向操作,同时也可以使得挖掘装置在不同方位进行挖掘。
10.本实用新型在一较佳示例中可以进一步配置为:所述挖掘装置包括大臂,所述大臂一端与所述安装座上侧铰接,所述大臂的另一端设有小臂,所述大臂与所述小臂的侧壁铰接,所述大臂上部的下侧铰接有第二液压缸,所述第二液压缸的下端与所述安装座铰接,所述小臂的上端铰接有第三液压缸一端,所述第三液压缸的另一端与所述大臂上部铰接,所述小臂的下端铰接有挖斗,所述挖斗靠近所述小臂一侧铰接有n形连杆,所述n形连杆的上端铰接有第四液压缸,所述第四液压缸的上端与所述小臂上部的侧壁铰接,所述n形连杆上侧的两端均铰接有弧形固定片一端,所述弧形固定片另一端与所述小臂下部的侧壁铰接。
11.通过采用上述技术方案,通过设置的大臂、小臂、第二液压缸、第三液压缸、挖斗、 n形连杆、第四液压缸与弧形固定片可以实现挖掘,其中设置的第二液压缸用于控制大臂的运动,设置的第三液压缸用于控制小臂的运动,设置的第四液压缸用于控制挖斗的运动,通过第二液压缸、第三液压缸、第四液压缸的相互配合使用可以使得挖斗进行挖运,且在该装置进行移动时通过第二液压缸、第三液压缸、第四液压缸的相互配合使用可以将该装置支撑起来,并与行走组件相互配合可以使得该装置达到行走的效果。
12.本实用新型在一较佳示例中可以进一步配置为:所述安装座上侧分别固定连接有液压多路阀与座椅组件,所述液压多路阀位于所述挖掘装置与所述座椅组件之间。
13.通过采用上述技术方案,通过设置的液压多路阀便于操作人员控制该装置,而且该装置的液压多路阀通过油管与外界的液压油站连接,外界的液压油站给该装置提供动力源,与现有的挖掘机相比,动力源与装置分离,重量小,便于移动,液压油站不会受到工作环境内的粉尘的影响。
14.本实用新型在一较佳示例中可以进一步配置为:所述座椅组件包括座椅本体,所述座椅本体的下侧固定连接有若干l形支撑杆,所述l形支撑杆的下部套接有矩形踏管,所述矩形踏管与所述l形支撑杆之间设有间隙,所述l形支撑杆的上侧面设有防滑纹,所述矩形踏管与所述安装座固定连接。
15.通过采用上述技术方案,设置的l形支撑杆插接于矩形踏管上,通过在矩形踏管横向移动l形支撑杆可以调节座椅本体距离液压多路阀之间的位置,从而操作人员可以根据
自身需求对座椅本体的位置进行调节,在操作人员坐在座椅本体上后,座椅的重心在水平方向上位于矩形套管的一侧,从而会使得l形支撑杆倾斜,进而l行支撑杆上侧设置的防滑纹与矩形踏管内侧的一侧边卡紧,使得座椅本体可以自动锁紧。
16.综上所述,本实用新型包括以下至少一种有益技术效果:
17.1.设置的第一液压缸、连接杆与支撑脚对该装置起到支撑座的作用,通过控制第一液压缸伸缩可以使得连接杆绕设自身与底盘的铰接处转动,同时支撑脚随着连接杆转动而摆动,在对底盘的水平角度进行调节时,控制一侧的行走组件中的第一液压缸伸缩即可使得底盘的水平角度发生变化,从而可以使得挖掘装置处于最佳工作状态,当同时控制第一液压缸伸长或者缩短时可以对底盘的高度进行调节,在该装置进行行走时,通过设置的挖掘装置与两个行走组件配合使用即可,在行走时挖掘装置始终对该装置进行支撑,使得靠近挖掘装置一侧的支撑脚处于置空状态,然后通过控制挖掘装置运动,使得挖掘装置对底座产生水平方向的分力,在挖掘装置运动的同时,通过控制回转装置以一定的角度往复转动,在回转装置转动时会会使得底盘随之一起运动,进而使得支撑该装置的支撑脚发生摆动,从而会使得该装置的底盘会在水平方向产生运动,将底盘运动至合适位置后控制挖掘装置使得位于空中的支撑脚落地对该装置支撑即可,与现有技术相比该装置便于在粉状物中行走,采用连接杆与支撑脚对该装置进行支撑,避免了传统的挖掘机的履带中因粉尘填充其内不便行走的问题,也比有效的避免了传统挖掘机轮子或者履带与工作地面因粉状颗粒过多导致打滑的问题。
18.2.通过设置的液压多路阀便于操作人员控制该装置,而且该装置的液压多路阀通过油管与外界的液压油站连接,外界的液压油站给该装置提供动力源,与现有的挖掘机相比,动力源与装置分离,重量小,便于移动,液压油站不会受到工作环境内的粉尘的影响。
19.3.设置的l形支撑杆插接于矩形踏管上,通过在矩形踏管横向移动l形支撑杆可以调节座椅本体距离液压多路阀之间的位置,从而操作人员可以根据自身需求对座椅本体的位置进行调节,在操作人员坐在座椅本体上后,座椅的重心在水平方向上位于矩形套管的一侧,从而会使得l形支撑杆倾斜,进而l行支撑杆上侧设置的防滑纹与矩形踏管内侧的一侧边卡紧,使得座椅本体可以自动锁紧。
附图说明
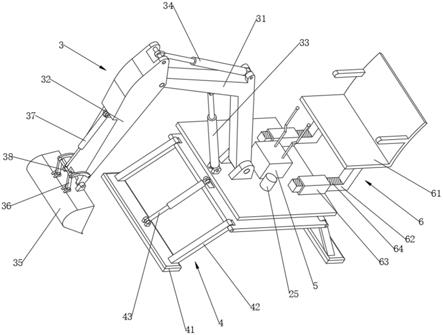
20.图1是本实用新型的正视图;
21.图2是本实用新型的侧视图;
22.图3是图回转装置内部的俯视图;
23.图4是l形支撑杆与矩形踏管连接处的内部示意图。
24.附图标记:1、底盘;2、回转装置;21、内齿轮;22、支撑套;23、安装座;24、驱动齿轮;25、液压马达;3、挖掘装置;31、大臂;32、小臂;33、第二液压缸;34、第三液压缸;35、挖斗;36、n形连杆;37、第四液压缸;38、弧形固定片;4、行走组件; 41、支撑脚;42、连接杆;43、第一液压缸;5、液压多路阀;6、座椅组件;61、座椅本体;62、l形支撑杆;63、矩形踏管;64、防滑纹。
具体实施方式
25.以下结合附图对本实用新型作进一步详细说明。
26.如图1和图2所示,为本实用新型所披露的一种步行式挖掘机,包括底盘1,底盘1 上侧设有回转装置2,回转装置2上侧设有挖掘装置3,底盘1的下部的两侧均设有行走组件4,行走组件4包括支撑脚41,支撑脚41与底盘1之间连接有若干连接杆42,较优的,连接杆42的数量为两个,两个连接杆42位于支撑脚41上侧的两端,连接杆42一端与支撑脚41固定连接,连接杆42另一端与底盘1铰接,支撑脚41与底盘1之间设有第一液压缸43,第一液压缸43的两端分别铰接于支撑脚41与底盘1。设置的第一液压缸43、连接杆42与支撑脚41对该装置起到支撑座的作用,通过控制第一液压缸43伸缩可以使得连接杆42绕设自身与底盘1的铰接处转动,同时支撑脚41随着连接杆42转动而摆动,在对底盘1的水平角度进行调节时,控制一侧的行走组件4中的第一液压缸43伸缩即可使得底盘1的水平角度发生变化,从而可以使得挖掘装置3处于最佳工作状态,当同时控制第一液压缸43伸长或者缩短时可以对底盘1的高度进行调节,在该装置进行行走时,通过设置的挖掘装置3与两个行走组件4配合使用即可,在行走时挖掘装置3始终对该装置进行支撑,使得靠近挖掘装置3一侧的支撑脚41处于置空状态,然后通过控制挖掘装置3运动,使得挖掘装置3对底座产生水平方向的分力,在挖掘装置3运动的同时,通过控制回转装置2以一定的角度往复转动,在回转装置2转动时会会使得底盘1随之一起运动,进而使得支撑该装置的支撑脚41发生摆动,从而会使得该装置的底盘1会在水平方向产生运动,将底盘1运动至合适位置后控制挖掘装置3使得位于空中的支撑脚41落地对该装置支撑即可,与现有技术相比该装置便于在粉状物中行走,采用连接杆42与支撑脚41对该装置进行支撑,避免了传统的挖掘机的履带中因粉尘填充其内不便行走的问题,也比有效的避免了传统挖掘机轮子或者履带与工作地面因粉状颗粒过多导致打滑的问题。
27.如图1和图3所示,为了便于控制安装座23转动,优选的,回转装置2包括内齿轮 21,内齿轮21与底盘1的上侧固定连接,内齿轮21外侧套设有支撑套22且两者转动连接,支撑套22上侧固定连接有安装座23,内齿轮21啮合有驱动齿轮24,驱动齿轮24的上侧设有液压马达25,液压马达25位于安装座23的上侧且与其固定连接,液压马达25 的输出轴贯穿安装座23并固定连接于驱动齿轮24的上端,液压马达25的输出轴与安装座23转动连接。控制液压马达25转动可以带动驱动齿轮24转动,由于底盘1用于承受该装置自身的重力,因此驱动齿轮24转动会在内齿轮21的作用力下带动安装座23转动,从而可以对该装置进行转向操作,同时也可以使得挖掘装置3在不同方位进行挖掘。
28.如图1和图2所示,进一步的,挖掘装置3包括大臂31,大臂31一端与安装座23上侧铰接,大臂31的另一端设有小臂32,大臂31与小臂32的侧壁铰接,大臂31上部的下侧铰接有第二液压缸33,第二液压缸33的下端与安装座23铰接,小臂32的上端铰接有第三液压缸34一端,第三液压缸34的另一端与大臂31上部铰接,小臂32的下端铰接有挖斗35,挖斗35靠近小臂32一侧铰接有n形连杆36,n形连杆36的上端铰接有第四液压缸37,第四液压缸37的上端与小臂32上部的侧壁铰接,n形连杆36上侧的两端均铰接有弧形固定片38一端,弧形固定片38另一端与小臂32下部的侧壁铰接。通过设置的大臂31、小臂32、第二液压缸33、第三液压缸34、挖斗35、n形连杆36、第四液压缸 37与弧形固定片38可以实现挖掘,其中设置的第二液压缸33用于控制大臂31的运动,设置的第三液压缸34用于控制小臂32的运动,设置的
第四液压缸37用于控制挖斗35的运动,通过第二液压缸33、第三液压缸34、第四液压缸37的相互配合使用可以使得挖斗35进行挖运,且在该装置进行移动时通过第二液压缸33、第三液压缸34、第四液压缸37 的相互配合使用可以将该装置支撑起来,并与行走组件4相互配合可以使得该装置达到行走的效果。
29.如图1和图2所示,为了便于控制该装置,优选的,安装座23上侧分别固定连接有液压多路阀5与座椅组件6,液压多路阀5位于挖掘装置3与座椅组件6之间。通过设置的液压多路阀5便于操作人员控制该装置,而且该装置的液压多路阀5通过油管与外界的液压油站连接,外界的液压油站给该装置提供动力源,与现有的挖掘机相比,动力源与装置分离,重量小,便于移动,液压油站不会受到工作环境内的粉尘的影响。
30.如图2和图4所示,为了便于对操作的操控位置进行调节,优选的,座椅组件6包括座椅本体61,座椅本体61的下侧固定连接有若干l形支撑杆62,较优的,l形支撑杆62 的数量为两个,l形支撑杆62的下部套接有矩形踏管63,矩形踏管63与l形支撑杆62 之间设有间隙,l形支撑杆62的上侧面设有防滑纹64,矩形踏管63与安装座23固定连接。设置的l形支撑杆62插接于矩形踏管63上,通过在矩形踏管63横向移动l形支撑杆62可以调节座椅本体61距离液压多路阀5之间的位置,从而操作人员可以根据自身需求对座椅本体61的位置进行调节,在操作人员坐在座椅本体61上后,座椅的重心在水平方向上位于矩形套管的一侧,从而会使得l形支撑杆62倾斜,进而l行支撑杆上侧设置的防滑纹64与矩形踏管63内侧的一侧边卡紧,使得座椅本体61可以自动锁紧。
31.本实施例的实施原理为:在对该装置进行移动时,首先控制第四液压缸37运动使得挖斗35前端的锯齿朝向下方,然后通过控制第二液压缸33与第三液压缸34的运动,使得该装置以挖斗35为支撑点,通过大臂31以及小臂32将该装置支撑起来,使得靠近挖斗35一侧的支撑脚41处于置空状态,通过控制液压马达25转动可以使得底盘1转动,从而可以使得支撑脚41支撑的位置发生改变,通过控制第三液压缸34运动,第三液压缸 34运动在大臂31的作用力下会使得安装座23受到水平方向的分力,同时控制液压马达 25往复转动一定角度,会使得底盘1随之一起运动,进而使得支撑该装置的支撑脚41发生摆动,从而会使得该装置的底盘1会在水平方向产生运动,将底盘1运动至合适位置后控制第二液压缸33与第三液压缸34,使得位于空中的支撑脚41落地对该装置支撑即可,在对底盘1的水平角度进行调节时,通过控制一侧的行走组件4中的第一液压缸43伸缩即可使得底盘1的水平角度发生变化,当同时控制第一液压缸43伸长或者缩短时可以对底盘1的高度进行调节。
32.本具体实施方式的实施例均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1