一种挡墙施工机器人的制作方法
1.本实用新型属于工程机械领域,具体涉及一种挡墙施工机器人。
背景技术:
2.挡墙是公路建设中常用的构造物。为了交通和邻近建筑物的安全,在经常发生泥石流或山体不稳定,遇刮风、下雨、融雪等有落石及滑坡的地区,需要对山体进行稳定加固或建设能阻碍落石及滑坡的挡土墙。挡土墙通过自身的重力或借助部分土体的重力,共同对不能维持自身稳定的土体进行加固,以保持路基的稳定,确保公路运输的安全、畅通。
3.挡土墙通常用干净湿润的砌块砌筑而成,人工砌筑时,先铺底浆,再放石块(先将石块的尖锐部分敲去),经左右轻轻揉动几下后,再轻击石块,使灰缝砂浆被压实。在已砌筑好的石块侧面安砌时,在相邻侧面先抹砂浆,后砌石,并向下及侧面用力挤压砂浆,使灰缝挤实,砌体被贴紧。以分段分层进行为原则。较长的砌体除分层外,还要分段砌筑,两相邻段的砌筑高差不应超过1.2m,分段处设置在沉降缝或伸缩缝的位置。分层砌筑时,先角石,后边石或面石,最后才填腹石。角石安放好后,从两边至中心进行,然后由边向中。
4.在现有技术中,多数挡墙采用人工施工的方式筑成,并没有较好的机械装置去取代人工。虽然人工施工可基本完成这一工作,但整体而言,人工施工存在工作量大、成本高、投入大、效率低、危险系数大、施工效果不均、不确定性多等诸多因素的影响。
5.与现有相关专利对比
6.中国专利cn201811243771.8通过料斗将物料从地面运送至hub仓,hub仓通过伸缩滑梯将物料运送至所需位置后,伸缩工作臂带动侧夹板对物料进行夹实和夯实,完成挡墙的修砌。该专利上料系统实现难度大,作业范围受限,对作业环境要求苛刻。该专利无法实现当前技术下的挡墙施工要求。
7.中国专利cn202022076879.1通过双轴电机驱动第一转轴上的锥齿轮转动,带动与第二锥齿轮相连的第二转轴和另一端的第三锥齿轮,从而使第二转轴通过螺纹柱带动螺纹帽侧面的工作台进行移动,完成砌筑工作。该专利虽然基本可完成墙体砌筑工作,但是砌块是相对规格的砌块。而挡墙施工会涉及到质量较大的筑块和复杂的工作环境,对机械装置的工作载荷和工作台的适应性需求较高,该专利无法适应挡墙施工的需求。
8.中国专利cn202011240496.1通过上料系统对砌筑基材进行筛选,并送入送料系统,送料系统将砌筑基材送入落料施工系统进行水泥砂浆浇注,浇注夯实后通过落料施工系统送入施工面完成挡墙施工。本利结构单一、实用性低、实现可能性小,且不能用于下挡墙施工。该专利也无法适应当前技术下的挡墙施工要求。
技术实现要素:
9.本实用新型的目的在于克服上述不足,提供一种挡墙施工机器人,以解决在路基挡墙施工过程中,人工施工工作量大、成本高、投入大、效率低、危险系数大、施工效果不均问题。
10.为了达到上述目的,本实用新型包括履带底盘,履带底盘上设置有横梁系统,横梁系统上设置有运送系统,横梁系统末端设置有桁架系统,横梁系统与桁架系统间设置有立柱系统,桁架系统上设置有水泥浇筑系统,水泥浇筑系统的末端设置有夯实装置;
11.水泥浇筑系统用于在预设位置进行水泥浇筑工作;
12.夯实装置用于对砌块进行振动夯实。
13.履带底盘包括驾驶室,驾驶室旁设置有控制柜,驾驶室底部设置有液压支撑调平装置和履带行走机构,驾驶室后部设置有回转平台,回转平台连接横梁系统,液压支撑调平装置和履带行走机构连接动力源。
14.运送系统包括送料装置和转料系统;
15.送料装置设置于横梁支架中,送料装置连接送料电机;
16.转料系统设置于立柱支架中,转料系统连接卷扬机。
17.横梁支架上设置有水平送料导向槽,送料装置上设置有水平送料导向轮,水平送料导向轮置于水平送料导向槽内。
18.立柱系统包括立柱支架,立柱支架上设置有竖直送料导向槽,转料系统的两端设置有竖直送料导向轮,竖直送料导向轮置于竖直送料导向槽内。
19.转料系统通过横梁-立柱连接装置与送料装置连接,转料系统与送料装置间设置旋转机构。
20.旋转机构采用液压旋转支撑装置,液压旋转支撑装置连接驱动电机。
21.桁架系统包括桁架支架,桁架支架上设置有桁架导向支撑装置,桁架支架连接桁架支架连接装置,桁架导向支撑装置上设置有用于与转料系统接触的导向滚轮,立柱系统顶部设置有绳索装置,绳索装置通过钢丝绳连接桁架导向支撑装置,绳索装置连接桁架伸缩电机,桁架导向支撑装置与桁架支架连接装置间设置有辅助支撑装置,桁架支架上设置有桁架横梁移动装置,桁架横梁移动装置上设置有工作臂组件和取料装置。
22.取料装置包括取料机构和取料驱动装置,取料驱动装置驱动使取料机构将砌块从转料系统取至取料机构上。
23.工作臂组件包括工作夹爪、推料机构和推料驱动装置,推料驱动装置驱动-推料机构将取料机构上的砌块推至工作夹爪上。
24.与现有技术相比,本实用新型通过履带底盘驱动移动,通过横梁系统上的运送系统对物料进行输送,在横梁系统与桁架系统间设置有立柱系统,实现在水平和竖直上的移动调整。本实用新型的结构简单容易安装,结构紧凑,实用性强,能充分发挥挡墙砌筑施工的优势。
25.进一步的,本实用新型利用回转平台调整作业角度,可进行多方位、多角度的施工,机器人履带底盘可以适应多种复杂地形且容易移动,整体设计对工作环境适应性强。
26.进一步的,转料系统与送料装置间设置旋转机构,能够实现立臂折叠,提高了运载过程中的可行性和可靠度。
27.进一步的,本实用新型设置有工作夹爪,通过对工作夹爪的旋转姿态的控制,实现了对石块的调整。
附图说明
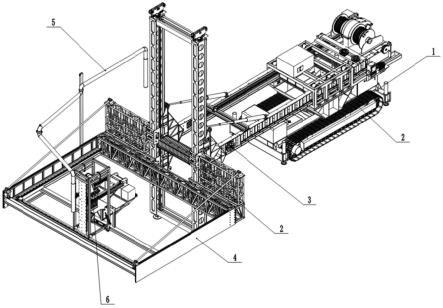
28.图1是本实用新型整机结构示意图。
29.图2是本实用新型履带底盘结构示意图。
30.图3是本实用新型支撑系统和送料装置结构示意图。
31.图4是本实用新型桁架系统。
32.其中:1-履带底盘,2-运送系统,3-横梁系统,4-桁架系统,5-水泥浇筑系统,6-夯实装置, 7-液压支撑调平装置,8-控制柜,9-驾驶室,10-履带行走机构,11-回转平台,12-动力源,13
‑ꢀ
卷扬机,14-横梁支架,15-驱动电机,16-水平移动装置,17-横梁移动导轨,18-送料装置,19
‑ꢀ
液压旋转支撑装置,20-横梁-立柱连接装置,21-桁架伸缩电机,22-绳索装置,23-竖直送料导向槽,24-竖直送料导向轮,25-转料系统,26-立柱底座,27-水平送料导向轮,28-水平送料导向槽,29-立柱支架,30-水平送料电机,31-桁架导向支撑装置,32.-桁架支架,33-辅助支撑装置,34-桁架支架连接装置,35-桁架横梁移动装置,36-工作臂组件,37-工作夹爪,38-推料机构,39-推料驱动装置,40-砌块,41-取料机构,42-取料驱动装置,43-托料机构,44-托料驱动装置,45-立柱系统。
具体实施方式
33.下面结合附图对本实用新型做进一步说明。
34.参见图1,本实用新型包括履带底盘1,履带底盘1上设置有横梁系统3,横梁系统3上设置有运送系统2,横梁系统3末端设置有桁架系统4,横梁系统3与桁架系统4间设置有立柱系统45,桁架系统4上设置有水泥浇筑系统5,水泥浇筑系统5的末端设置有夯实装置6;水泥浇筑系统5用于在预设位置进行水泥浇筑工作;夯实装置6用于对砌块40进行振动夯实。
35.参见图2,履带底盘1包括驾驶室9,驾驶室9旁设置有控制柜8,驾驶室9底部设置有液压支撑调平装置7和履带行走机构10,驾驶室9后部设置有回转平台11,回转平台11连接横梁系统3,液压支撑调平装置7和履带行走机构10连接动力源12。液压支撑调平装置7满足设备施工时候整机的水平度以及整车的稳定性;控制柜8是机车的控制系统(包含液压控制系统和弱电控制系统);驾驶室9为操作者提供可供操作的工位(包含人机界面、手动操作手柄及按钮等)。履带行走机构10满足设备行走的功能;回转平台11可使与其连接的装置旋转以适应不同的作业环境和运输环境。动力源12为设备提供电源。
36.参见图3,送料装置2包括送料装置18和转料系统25;送料装置18设置于横梁支架14 中,送料装置18连接送料电机30;转料系统25设置于立柱支架29中,转料系统25连接卷扬机13。横梁支架14上设置有水平送料导向槽28,送料装置28的上设置有水平送料导向轮 27,水平送料导向轮27置于水平送料导向槽28内。立柱系统45包括立柱支架29,立柱支架 29上设置有竖直送料导向槽23,转料系统25的两端设置有竖直送料导向轮24,竖直送料导向轮24置于竖直送料导向槽23内。转料系统25通过横梁-立柱连接装置20与送料装置18连接,转料系统25与送料装置28间设置旋转机构。水平移动装置16与水平移动导轨17相连并在驱动电机15工作下移动进而实现支撑系统3和桁架系统4的移动,且水平移动装置16与回转平台11相连,回转平台11工作使支撑系统3和桁架系统4的旋转进而实现设备适应不同的作业环境和运输环境。液压旋转支撑装置19上设有滚轮,在驱动电机15的驱动下可将立柱支架29升起离开地面,便于施工调平和运输。
37.优选的,旋转机构包括有液压旋转支撑装置19,液压旋转支撑装置19连接驱动电机15。
38.参见图4,桁架系统4包括桁架支架32,桁架支架32上设置有桁架导向支撑装置31,桁架支架32连接桁架支架连接装置34,桁架导向支撑装置31上设置有用于与转料系统25接触的导向滚轮,立柱系统45顶部设置有绳索装置22,绳索装置22通过钢丝绳连接桁架导向支撑装置31,绳索装置22连接桁架伸缩电机21,桁架导向支撑装置31与桁架支架连接装置34 间设置有辅助支撑装置33,桁架支架32上设置有桁架横梁移动装置35,桁架横梁移动装置上设置有工作臂组件36和取料装置。取料装置包括取料机构41和取料驱动装置42,取料驱动装置42驱动使取料机构41将砌块40从转料系统25取至取料机构41上。工作臂组件36包括工作夹爪37、推料机构38和推料驱动装置39,推料驱动装置39驱动-推料机构38将取料机构41上的砌块40推至工作夹爪37上。托料机构43是在推料机构38工作时由托料驱动装置44带动托料机构43正向旋转完成托料工作。由托料驱动装置44工作使托料机构43反向旋转完成避让工作使工作夹爪37顺利完成落料砌筑工艺。
39.使用时,本实用新型通过履带行走机构10进入施工工地,回转平台11工作调整桁架系统 4进入施工区,立柱底座26调整立柱支架29使桁架系统4水平。水泥浇筑系统5浇筑待砌区使待砌区均匀铺设水泥砂浆,进而使设备具备施工条件。
40.送料装置18通过水平送料电机30将送料装置18里的砌块40送至转料系统25处,转料系统25通过卷扬机13将转料系统25里的砌块40送至桁架系统4处。取料驱动装置42使取料机构41将砌块40取至取料驱动装置42上。由推料驱动装置39工作将砌块40推至工作夹爪37。由工作夹爪37完成砌块40的姿态调整和砌筑,夯实装置6工作将刚砌筑的砌块40振动夯实。以此类推完成整个待砌区的挡墙施工。完整待砌区后,卷扬机13将立柱支架29提升离开地面,液压旋转支撑装置19收回,履带行走机构10工作使设备进入下一个待砌区。卷扬机13工作将立柱支架29下放至立柱底座26接触地面重复上述动作。
41.待完成整段挡墙施工后桁架伸缩电机21工作通过绳索装置22将桁架系统4提升至一定高度,重复上述动作就可完成整个挡墙的施工。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1