用于运行作业机械的电的驱动系的方法、用于作业机械的电的驱动系和作业机械与流程
1.本发明涉及根据权利要求1的前序部分的用于运行作业机械的电的驱动系的方法、根据权利要求11的前序部分的用于作业机械的电的驱动系以及相应的作业机械。
背景技术:
2.在现有技术中已知诸如轮式装载机、紧凑型装载机、伸缩式装载机、自卸车或挖掘机之类的电驱动的作业机械。这些电驱动的作业机械要么是纯电驱动的,也就是说它们仅经由电池供能,要么是柴电驱动的,这意味着,所需的能量由柴油驱动的发电机通常结合电的缓冲存储器、如相应规格的电容器提供。在所有情况下,行驶驱动和作业驱动所需的机械功率由一个或多个电动马达产生。此外,混合电动的作业机械也是已知的,在混合电动的作业机械中,运行所需的机械功率主要由内燃机马达、通常是柴油机马达产生。附加设置的电动马达由电池馈能并且在此典型地承担起所谓的动力增强功能。
3.在这方面,de 20 2014 000 738 u1说明了一种纯电动马达驱动的轮式装载机,其具有用于行驶驱动的第一电动马达和用于作业驱动的第二电动马达。
4.由ep 0 962 597 a2已知一种电池运行的作业机械,该作业机械为了行驶驱动具有两个电动马达并具有用于作业驱动的另外的电动马达。
5.但所公知的电驱动的作业机械具有的缺点是,这些作业机械由于用于驱动的电动马达受结构形式所致,使得在作业机械减速时、即在降低电动马达的转速时,在驱动系中具有较大的惯性,尤其是在应当经由电动马达的再生运行或机械的摩擦制动器进行制动时。这些行为的起因在于电动马达的相对非常高的转速和其高的质量惯性。因此,在满负荷下转动的电动马达具有比相应功率强劲地构造的内燃机在满负荷下明显更大的旋转能量。这在电驱动的轮式装载机中例如会导致,轮式装载机在铲斗从中速或高速插入土堆或类似物时由于铲斗而减速,而车轮未能将相应的减速传输给电动马达。结果是车轮在这种状况下强行转动,这导致了轮式装载机不期望地插陷。
技术实现要素:
6.本发明的任务是,建议一种改进的用于运行作业机械的电的驱动系的方法。
7.该任务根据本发明通过根据权利要求1的用于运行作业机械的电的驱动系的方法解决。本发明的有利的设计方案和改进方案由从属权利要求可知。
8.本发明涉及一种用于运行作业机械的电的驱动系的方法,其中,驱动系包括具有电的作业马达的作业驱动器和具有电的行驶马达和车轮的行驶驱动器,其中,从外部使作业机械减速,并且其中,通过减速作用到车轮上的制动力能小于通过行驶马达的惯性矩作用到车轮上的驱动力。根据本发明的方法的突出之处在于,当借助状况检测预见性地识别出通过减速作用到车轮上的制动力小于作用到车轮上的驱动力时,为了降低转速而向行驶马达加载与其运行方向相反的电流。
9.因此本发明说明了一种方法,该方法涉及到作业机械的电的驱动系的运行,其中,驱动系至少由两个能独立于彼此运行的驱动器构成,即作业驱动器和行驶驱动器。能想到的并且优选的是,驱动系也包括另外的元件或另外的驱动器,例如动力输出装置或辅助驱动器。尤其地,驱动系也包括电的储能器,其优选被构造为能重复充电的电池。无论是作业驱动器还是行驶驱动器,有利地分别包括一个或多个电动马达,这些电动马达根据其配属关系被用作行驶马达或作业马达。驱动系可以附加地包括传动装置或传动比级、从动器、液压的部件、控制电子器件和功率电子器件。电动马达特别有利地涉及到分别结构相同的用于行驶驱动的和用于作业驱动的电动马达。因此就电动马达而言,可以促成降低成本的件数效应。行驶驱动器还包括车轮,车轮由行驶马达驱动并且传动式与行驶马达刚性连接或者能经由离合器传动式与行驶马达刚性连接。作业驱动器同样包括作业设备,例如铲斗或升降支架,它们由作业马达驱动。
10.在特定的运行状况中可能出现的情况是,从外部使作业机械减速。在本发明的范围内,这指的是既不是经由车辆制动器也不是经由行驶驱动器引起的减速。取而代之的是,由于作业机械与外部条件的相互作用产生了减速。例如可能涉及到陡峭的上坡行驶或者也可能涉及到作业机械的作业设备插入到土或碎石中。两者皆导致了,在没有自己参与并且尤其是没有作业机械的操作者的制动要求的情况下从外部使作业机械减速。
11.尤其是当作业机械在被减速时首先具有较高的速度并且行驶马达因此具有较高的转速时,可能发生,经由车轮作用到行驶马达上的制动力小于通过行驶马达的惯性矩作用到车轮上的驱动力。因为行驶马达被构造成电动马达,所以行驶马达具有相对较大的惯性矩,惯性矩在减速时抵制转速降低。由于电动马达的这种惯性矩和转速,使得甚至在没有继续给行驶马达通电时,驱动力也还作用到车轮上。通过减速作用到车轮上的制动力在此起决定性地受到车轮到地面上的传力能力的影响,即受到车轮在各自的地面上的附着力的影响。当现在驱动力变得大于同样作用到车轮上的制动力时,车轮失去其地面附着并且强行转动。换句话说,车轮可能无法像作业机械降低其速度那样程度地降低其转动速度。这可能导致作业机械不期望地插陷到地面中。
12.例如可能发生的是,被构造为轮式装载机的作业机械以相对较高的速度将被构造为铲斗的作业设备移入到土堆中,并且由于铲斗移入到土堆中而使其减速。相对较高的速度在此是必要的,以便将铲斗尽可能深地移入到土堆中。但车轮的地面附着可能不够大到足以如降低作业机械的速度那样程度地降低行驶马达的转速。因此作用到车轮上的驱动力大于作用到车轮上的制动力并且使得这些车轮强行转动,因此使得轮式装载机被插陷并且使得轮式装载机在铲斗从土堆移出时难以倒车。
13.因此根据本发明设置的是,进行状况检测,借助状况检测能预见性地识别出从外部作用的减速是即将发生还是如有可能已经开始,并且由此造成的作用到车轮上的制动力是否小于由于继续转动的行驶马达的惯性矩而作用到车轮上的驱动力。状况检测可以预见性地识别出存在这种状况,例如是由于作业机械在没有通过作业机械的操作者相应地控制输入的情况下而开始减速。为了现在有利地避免车轮的强行转动和因此避免作业机械的不期望的插陷,根据本发明与其当前的运行方向相反地给行驶马达通电,以便提供作用到行驶马达上的附加的制动力矩。
14.根据本发明的一种优选的实施方式设置的是,借助周围环境传感装置进行状况检
测。合适的周围环境传感器可以尤其是相机传感器、雷达传感器或激光雷达传感器。周围环境传感器例如尤其是结合相应的传感器数据评估能够实现识别出如下状况,在所述状况中,从外部使作业机械减速。例如可以识别出轮式装载机靠近碎石堆,以便将其铲斗移入到碎石堆中。随着到达碎石堆并且因此随着减速的开始,通过与行驶马达的转动方向相反的通电可以主动地降低行驶马达的转速。
15.根据本发明的另一种优选的实施方式设置的是,借助加速度传感装置和/或倾斜度传感装置进行状况检测。借助加速度传感装置可以例如识别出在没有作业机械的操作者的相应的控制输入的情况下使作业机械减速并且因此必然涉及到从外部的减速。倾斜度传感装置可以借助加速度传感装置以如下方式支持状况检测,即,例如检测到陡峭的斜度是从外部减速的起因或者检测到由于铲斗移入到土堆中而使作业机械在后桥处发生抬升是从外部减速的起因。
16.根据本发明的另一种优选的实施方式设置的是,借助滑转的离合器进行状况检测,其中,将离合器压力预定为使得能通过离合器传输的力矩小于由制动力引起的制动力矩。在车轮处的制动力矩在此是由车轮的地面附着产生的最大可能的制动力矩。因此如果离合器滑转,则可以识别出还有驱动力作用到从外部制动的车轮上。
17.在此优选将离合器压力预定为使得作业机械的正常的行驶运行不受妨碍。特别优选地,只有在作业机械起动之后离合器压力才可以下降到使得能通过离合器传输的力矩小于车轮处的最大的制动力矩,该最大的制动力矩在从外部作用的减速下通过车轮的地面附着产生。
18.根据本发明的另一种优选的实施方式设置的是,借助对行驶驱动器的转速监控和/或转矩监控进行状况检测。可以例如在行驶驱动器中转速降低且同时在行驶驱动器中转矩上升时,尤其是在缺少操作者的相应的控制输入的情况下,识别出从外部作用的减速的存在。当转矩同时超过了能预定的阈值时,可以与其转动方向相反地主动给行驶马达通电,以避免车轮强行转动。
19.特别优选地,也可以借助监控行驶驱动器中的转速梯度和/或转矩梯度进行状况检测。
20.同样特别优选地,借助监控车轮的打滑进行状况检测。在所有车轮处的打滑发生跳跃式增加时,尤其是结合状况识别的前述优选的实施方式中的一种或多种实施方式地,可以同样例如识别出通过减速作用到车轮上的制动力小于作用到车轮上的驱动力。车轮的打滑优选借助本来就存在的abs传感器获知。
21.根据本发明的另一种优选的实施方式设置的是,借助绝对的速度监控进行状况检测。绝对的速度监控涉及到所谓的“对地速度”(speed over ground)的监控。当所规定的绝对速度相比作业机械的经由车轮转速获知的速度剧烈下降时,那么在这种情况下也可以识别出通过减速作用到车轮上的制动力小于作用到车轮上的驱动力。
22.根据本发明的另一种优选的实施方式设置的是,借助监控行驶驱动器的功率要求进行状况检测。例如通过操作者对行驶马达的最大功率的调用,即所谓的“强制换低档”(kickdown),尤其是结合作业机械在紧随其后的减速地,例如可以推断出,操作者想要通过强制换低档获取足够的动能冲力并且需要高转矩来例如将轮式装载机的铲斗尽可能深地移入到土堆中。紧随其后的减速将发信号告知到达土堆并移入了铲斗。
23.根据本发明的另一种优选的实施方式设置的是,借助监控作业驱动器的行为进行状况检测。作业驱动器的行为在此可以同样包括在作业液压机构中的压力变化以及铲斗在铲斗臂处的取向或定位、升降支架的位置或者简单来讲操作者例如在配属于作业驱动器的控制元件处、例如操纵杆处进行的控制输入。
24.根据本发明的另一种优选的实施方式设置的是,借助监控作业机械的操作者的驾驶行为进行状况检测,其中,事先了解在马上面临减速时作业机械的操作者的驾驶行为。因此有利地通过观察操作者的驾驶行为以及通过从外部的减速是否典型地与操作者的特定的驾驶行为相配属来识别:从外部作用的减速是否马上来临。
25.驾驶行为在此可以例如包括加速度变化曲线、速度变化曲线、控制输入或转向角。
26.特别优选地,不仅要了解操作者的驾驶行为,而且也要基于操作者的不同的驾驶行为区分出作业机械的多个不同的操作者并且借助对驾驶行为的监控实施各种状况检测。当操作者坐在作业机械的驾驶员座椅上时,在此例如也借助他们的体重区分不同的操作者。为此可以将体重检测设备集成到驾驶员座椅中。
27.优选设置的是,附加地借助监控行驶传动装置的分别所挂入的档级、差速锁止器的状态、行驶马达的或作业马达的温度以及借助gps位置信息进行状况检测。档级在此可以例如作为驾驶行为的一部分进行检测,同样还有的差速锁止器和行驶马达的或作业马达的温度。gps位置信息可以例如用于识别作业机械接近土堆,该土堆的gps位置是已知的。
28.根据本发明的另一种优选的实施方式设置的是,通过如下方式支持行驶马达的转速降低,即,进行降档。通过降档如下这样来改变在行驶马达与车轮之间的转速比,即,使得驾驶马达的较高的转速现在相应于车轮的转速,或者使得车轮的降低的转速相应于行驶马达的转速。因此可以至少通过车轮的转速的降低延缓作业机械的不期望的插陷,直至通过与其当前的转动方向相反的通电而可以降低行驶马达的转速直至车轮不会较长时间地强行转动。
29.本发明还涉及一种用于作业机械的电的驱动系,其中,该驱动系包括具有电的作业马达的作业驱动器和具有电的行驶马达和车轮的行驶驱动器,其中,车轮传动式与或者能与行驶马达刚性联接,从而使得在发生从外部作用到作业机械上的减速的情况下,存在通过减速作用到车轮上的制动力。根据本发明的驱动系的突出之处在于,驱动系被构造成用于借助状况检测预见性地识别出通过减速作用到车轮上的制动力是否小于通过行驶马达的惯性矩作用到车轮上的驱动力,其中,行驶驱动器被构造成用于当识别出制动力小于驱动力时,为了降低转速而与行驶马达的运行方向相反地对行驶马达通电。
30.根据本发明的驱动系因此能够实现实施根据本发明的方法,这导致已经结合根据本发明的方法所说明的优点。
31.优选设置的是,驱动系还包括用于驱控行驶马达的逆变器。逆变器有利地被构造成用于除了原本驱控行驶马达外,也实施形式为能电子地运行的软件算法的根据本发明的方法。由此获得了较高的控制速度的优点,因为逆变器直接驱控行驶马达。
32.本发明还涉及一种作业机械,该作业机械包括根据本发明的驱动系。由此也为根据本发明的作业机械得到了已经结合根据本发明的驱动系所说明的优点。
33.根据本发明的一种优选的实施方式设置的是,作业机械被构造为轮式装载机。
附图说明
34.接下来借助附图所示的实施方式示例性地阐释本发明。
35.其中:
36.图1以工作原理图的形式示例性地示出根据本发明的用于运行作业机械的电的驱动系的方法的一种可能的实施方式;并且
37.图2示例性地和示意性地示出根据本发明的作业机械的一种可能的构造形式。
38.相同的主题、功能单元和相似的部件跨越附图地标以相同的附图标记。这些主题、功能单元和相似的部件在它们的技术特征方面一致实施,除非说明书明确或隐晦地另行说明。
具体实施方式
39.图1以工作原理图的形式示例性地示出了根据本发明的用于运行作业机械10的电的驱动系11的方法的一种可能的实施方式。驱动系11包括具有电的作业马达21的作业驱动器20和具有电的行驶马达31和车轮32的行驶驱动器30。当从外部使作业机械10减速时,可能发生的是,通过减速作用到车轮32上的制动力小于通过行驶马达31的惯性矩作用到车轮32上的驱动力。因此在这样的状况下可能发生的是,车轮32具有的转速比作业机械10的实际速度更大。车轮32因此强行转动,这导致了作业机械10的不期望的插陷。为了避免这一点,首先执行根据本发明的状况检测,这通过功能块100阐明。功能块100在此包括一系列子块101~113,它们分别说明状况检测的具体类型。在块101中,借助监控作业机械10的被驱动的车桥的转速进行状况检测。块102代表了借助监控被驱动的车轮32的轮胎打滑进行的状况检测。块103说明了借助监控已发生偏转的转向角进行的状况检测,并且块104说明了借助监控作业驱动器20中的液压压力进行的状况检测。块105代表了借助周围环境传感装置12、例如借助相机传感器进行的状况检测,并且块106代表了借助加速度传感装置进行的状况检测。块107代表了借助监控行驶驱动器30的行驶传动装置33的输出转速进行的状况检测,并且块108代表了借助监控行驶传动装置33的已挂入的档级进行的状况检测。块109又说明了借助监控被驱动的车桥的差速锁止器进行的状况检测。块110、111和112说明了借助监控对作业驱动器20的输入器件的操纵、作业驱动器20的铲斗的定位和作业驱动器20的液压泵的调节角度进行的状况检测。在块113中,最后借助监控行驶马达31和作业马达21、特别是监控温度、转速、转矩、转速梯度和转矩梯度进行的状况检测。在功能块200中,自动如下来评估在功能块100中检测的状况检测,即,能预见性地识别出是否马上面临一种状况,在该状况中,通过减速作用到车轮32上的制动力小于通过车轮32作用的驱动力并且因此出现了车轮32由于来自外部的减速而强行转动。倘若这被预见性地识别出,那么在功能块300中主动降低行驶马达31的转速。为此在子块301中,为了降低转速而与其运行方向相反地给行驶马达31通电。在块302中附加地进行降档以支持行驶马达31的快速的转速降低。
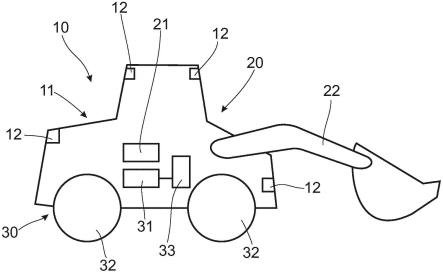
40.图2示例性地和示意性地示出了根据本发明的作业机械10的一种可能的构造形式。作业机械10例如被构造为轮式装载机10并且包括电的驱动系11。电的驱动系11本身又包括具有电的作业马达21和作业装置22的作业驱动器20以及具有电的行驶马达31和被驱动的车轮32的行驶驱动器30。车轮32能经由行驶传动装置33传动式与行驶马达31刚性联接,从而使得在发生从外部作用到轮式装载机10上的减速的情况下,存在通过减速作用到
行驶马达31上的制动力。但通过行驶马达31的惯性矩产生的并且作用到车轮上的驱动力抵制了该制动力。当该驱动力变得大于制动力时,发生车轮32强行转动并且轮式装载机10插陷。
41.驱动系11因此被构造成用于实施根据本发明的方法。借助适用于此的周围环境传感装置12进行状况检测,以便预见性地识别,通过减速作用到行驶马达31上的制动力是否小于通过行驶马达31的惯性矩作用到车轮32上的驱动力。倘若是这种情况,那么为了降低转速而与其运行方向相反地给行驶马达31通电。
42.附图标记列表
43.10 作业设备
44.11 电的驱动系
45.12 周围环境传感装置
46.20 作业驱动器
47.21 作业马达
48.22 作业设备
49.30 行驶驱动器
50.31 行驶马达
51.32 车轮
52.33 行驶传动装置
53.100 状况检测
54.101借助监控被驱动的车桥的转速进行的状况检测
55.102借助监控被驱动的车轮的轮胎打滑进行的状况检测
56.103借助监控已偏转的转向角度进行的状况检测
57.104借助监控作业驱动器中的液压压力进行的状况检测
58.105借助周围环境传感装置进行的状况检测
59.106借助加速度传感装置进行的状况检测
60.107借助监控行驶传动装置的输出转速进行的状况检测
61.108借助监控行驶传动装置的挂入档级进行的状况检测
62.109借助监控差速锁止器进行的状况检测
63.110借助监控对作业驱动器的输入器件的操纵进行的状况检测
64.111借助作业驱动器的铲斗的定位进行的状况检测
65.112借助作业驱动器的液压泵的调节角度进行的状况检测
66.113借助监控行驶马达和作业马达进行的状况检测
67.200 状况检测
68.300 降低行驶马达的转速
69.301对行驶马达通电以降低转速
70.302降档以支持行驶马达的转速降低。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1