装载机械的控制系统、装载机械及装载机械的控制方法与流程
本发明涉及装载机械的控制系统、装载机械及装载机械的控制方法。
背景技术:
1、在涉及具有作业机的装载机械的技术领域中,已知有如专利文献1所公开的、能够执行高效的挖掘动作的装载机械。
2、专利文献1:日本特开2019-203381号公报
技术实现思路
1、根据某特定的作业循环,装载机械在用作业机对挖掘对象进行挖掘后,将挖掘物装载至运载车辆。在将挖掘物装载至运载车辆时,理想的是装载机械将挖掘物的重量调整为对运载车辆来说最适合的重量来进行装载。
2、本发明的目的在于使装载机械的装载作业最优化。
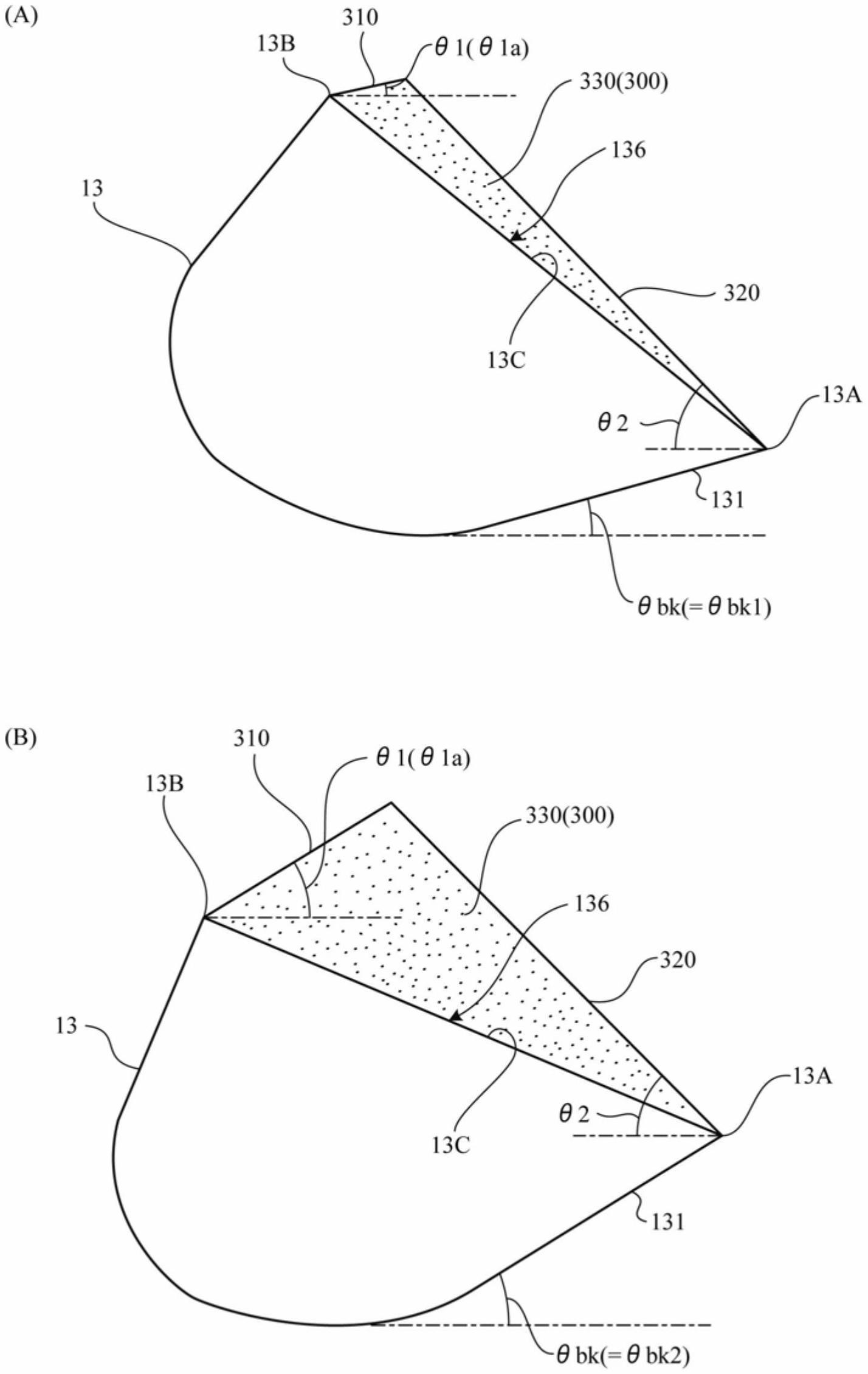
3、本发明涉及的、具有包含铲斗的作业机的装载机械的控制系统具备控制装置。控制装置对在挖掘作业中通过铲斗挖掘出的挖掘物的第一表面进行检测;并且基于第一表面的检测数据,计算挖掘中载货角,该挖掘中载货角表示第一表面相对于水平面的角度;并且基于挖掘中载货角,推算挖掘物的重量。
4、根据本发明,能够使装载机械的装载作业最优化。
技术特征:
1.一种装载机械的控制系统,其为具有包含铲斗的作业机的装载机械的控制系统,其特征在于,
2.根据权利要求1所述的装载机械的控制系统,其特征在于,
3.根据权利要求1或2所述的装载机械的控制系统,其特征在于,
4.根据权利要求1至3中任一项所述的装载机械的控制系统,其特征在于,
5.根据权利要求4所述的装载机械的控制系统,其特征在于,
6.根据权利要求5所述的装载机械的控制系统,其特征在于,
7.根据权利要求6所述的装载机械的控制系统,其特征在于,
8.根据权利要求7所述的装载机械的控制系统,其特征在于,
9.根据权利要求1至8中任一项所述的装载机械的控制系统,其特征在于,
10.根据权利要求1至9中任一项所述的装载机械的控制系统,其特征在于,
11.根据权利要求10所述的装载机械的控制系统,其特征在于,
12.根据权利要求10或11所述的装载机械的控制系统,其特征在于,
13.根据权利要求1至9中任一项所述的装载机械的控制系统,其特征在于,
14.根据权利要求13所述的装载机械的控制系统,其特征在于,
15.根据权利要求13或14所述的装载机械的控制系统,其特征在于,
16.一种装载机械,其特征在于,
17.一种装载机械的控制方法,
技术总结
具有包含铲斗的作业机的装载机械的控制系统具备控制装置。控制装置对在挖掘作业中通过铲斗挖掘出的挖掘物的第一表面进行检测;并且基于第一表面的检测数据,计算表示第一表面相对于水平面的角度的挖掘中载货角;并且基于挖掘中载货角推算挖掘物的重量。
技术研发人员:大浅贵央,青岛幸司,五十岚康博,小野寺由孝,小松健浩,菊地正蔵
受保护的技术使用者:株式会社小松制作所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!