逐级成对上下往复组合式鱼道及过鱼方法
1.本发明涉及过鱼设施技术领域,具体是一种逐级成对上下往复组合式鱼道。
背景技术:
2.随着全球水利水电的不断发展,全世界的大小河流新建各种水工构筑物。水利水电工程在促进社会经济发展的同时,对其周围的生态坏境也产生一定的影响。一方面大型水利水电工程的修建阻断了河流的连通性,致使河流中原来的水位、流速、流量等水文要素发生了改变;另一方面水利水电工程的修建对河流中的物质循环、信息传递、能量流动等也造成了影响,鱼类生命活动所需的栖息地发生改变。由于鱼类生活的天然栖息地受到了破坏,导致鱼类的产卵、索饵、越冬等洄游活动的延缓和停止,从而引起鱼类物种的丰富度降低和多样性的减少,甚至会导致濒危物种的灭绝。为了恢复鱼类栖息地与河流的连通性,保护鱼类物种资源,国内外实施了人工增殖放流、建造人工场地、修建过鱼设施等补救措施。人工增殖放流是通过人工孵化、培育,向河流栖息地投放幼苗增加鱼类的种群数量的一种方法;建造人工场地是在水利枢纽工程完成之后为鱼类寻找并修建一个满足产卵条件的栖息地,让鱼类进入新的栖息地产卵;过鱼设施是一种帮助鱼类通过拦河闸坝的设施,在鱼类洄游过程中能够顺利上溯发挥重要作用。
3.鱼道是在闸坝或天然障碍处为鱼类洄游而兴建的一种过鱼建筑物,是降低闸坝对鱼类生存和繁殖干扰的一种生态补偿措施。目前,鱼道是国内外最常用、最有效的过鱼设施。世界上现有鱼道的主要类型有丹尼尔式、溢流堰式、淹没孔口式、竖缝式、组合式、特殊结构式和仿自然式,我国以竖缝式鱼道和仿自然式鱼道为主。从竖缝式鱼道、仿自然式鱼道对应的坝高看,竖缝式鱼道坝高介于6.0m和39.7m,仿自然式鱼道对应坝高为6.0~28.7m。竖缝式鱼道对应的坝高范围较广,且鱼道长度和坝高呈正相关关系,即坝高越高,鱼道越长,通过增加鱼道长度降低坡度,以此达到限制流速的要求;鱼道内流速介于0.5~1.7m/s。仿自然式鱼道对应坝高范围也较广,鱼道深度为2.5m,流速介于0.6m/s和1.2m/s之间。
4.鱼道对于减小大坝的阻隔影响,帮助恢复鱼类和其他水生生物物种在河流中自由洄游具有重要的意义。鱼道的有效运行是保持河流纵向连通性的重要技术手段之一。但对现有鱼道设施的调研表明:大部分鱼道运行情况并不理想,过鱼效率不高,甚至有部分鱼道完全没有过鱼,本发明的逐级成对上下往复组合式鱼道及过鱼方法能够克服传统鱼道修建长度大、过鱼效率低的缺陷。
技术实现要素:
5.发明目的:为了降低传统鱼道对鱼类克流能力和连续跳跃能力的要求,提高鱼道过鱼效率、保护天然渔业资源、保障水生生态系统的连续性和多样性,本发明提供一种逐级成对上下往复组合式鱼道。包括若干个鱼道单元、机械传动系统、驱鱼系统、控制系统和回收索道。
6.所述鱼道单元由底板、翼墙、齿轮带、滑槽、滑块、凹槽、曲面从动件、隔板和滚筒排
组成。所述底板水平固定在曲面从动件上方,所述翼墙垂直固定在鱼道底板的左右两侧,翼墙内侧设有齿轮带,翼墙的前端设置有滑槽、后端设置有滑块,相邻的鱼道单元的翼墙之间通过滑槽与滑块相嵌滑动衔接。所述曲面从动件位于底板下部,曲面从动件底部横向设置有凹槽。
7.所述机械传动系统由偏心轮、电动机和传动轴组成。所述偏心轮为圆柱形结构,偏心轮位于曲面从动件正下方,并与曲面从动件的凹槽滑动接触,偏心轮外表面设有曲面滑道,曲面滑道内安装有若干个滚珠,偏心轮设有轴孔。所述电动机的转轴与传动轴通过减速齿轮组相连,所述传动轴穿过全部偏心轮的轴孔并与轴孔固定连接。
8.所述驱鱼系统由驱动装置、卷筒、驱鱼网、网兜和控制系统组成。所述驱动装置包括驱动电机以及与驱动电机相连接的驱动轴和齿轮,齿轮与齿轮带啮合连接。所述驱鱼网上端与卷筒固定、下端与网兜固定。所述控制系统控制电动机、驱动装置、卷筒、驱动轮、伸缩杆和抓钩的运行状态。
9.所述回收索道由驱动轮、缆绳、握索器、伸缩杆和抓钩组成。所述驱动轮为表面设有凹槽的不锈钢圆柱,所述缆绳束缚在驱动轮的凹槽内,所述握索器固定在缆绳上,所述伸缩杆能够上下伸缩,伸缩杆上端与握索器相连,下端与抓钩相连,所述抓钩能够自由缩放。
10.所述曲面从动件顶部为平面、底部为曲面,曲面从动件的顶部大小与底板的大小相同,所述曲面从动件横截面由上而下逐渐减小,曲面从动件整体形状为底部下凹的倒立梯形台,曲面从动件底部的曲率与偏心轮的曲率大小相同。
11.所述偏心轮外表面设有下凹式的曲面滑道,所述曲面滑道内布设有若干个滚珠,曲面滑道通过滚珠与曲面从动件底部横向设置的凹槽滚动接触。
12.所述鱼道单元的底板整体的高度自上游向下游递减,相邻鱼道单元的底板的最大高度差值等于偏心轮远毂半径与近毂半径的差值,相邻鱼道单元的底板的最小高度差值等于零。
13.在本发明中,所述偏心轮通过传动轴穿过轴孔连接,相邻偏心轮的最高点到传动轴的垂直距离分别为偏心轮的远毂半径与近毂半径。
14.在本发明中,所述驱动装置两端装有齿轮,齿轮在运动中与齿轮带相啮合,驱动装置由控制系统调控。
15.在本发明中,所述卷筒与驱鱼网上端相连接,卷筒在驱动装置的驱动下能够适时收放驱鱼网。
16.优选地,所述隔板垂直设置在偶数鱼道单元的底板前后两端,并与左右两侧的翼墙固定连接;所述滚筒排分别水平固定在奇数鱼道单元进口和出口两端,滚筒排底部与底板相切,滚筒排外圈材料采用耐磨损橡胶。
17.优选地,所述网兜边框材料为实心不锈钢,网兜形状为布满小孔的簸箕形状,网兜依靠自身重力将驱鱼网展开,网兜敞口端形状为长方形,网兜敞口端底部向上仰起。
18.优选地,所述滑槽与滑块相嵌滑动衔接,上一级鱼道单元的滑块嵌入下一级鱼道单元的滑槽中并相互滑动,相邻鱼道单元的滚筒排的每根滚筒均与隔板相切并相互滚动。
19.优选地,本发明中的鱼道单元底部采用等距离布置的偏心轮对鱼道单元的高度进行调控。
20.优选地,本发明中的相邻鱼道单元运行至同一高度时,相邻鱼道单元的齿轮带正
好衔接,所述驱动装置顺利通过衔接的齿轮带。
21.优选地,本发明中的电动机的转轴与传动轴通过减速齿轮组相连。
22.优选地,本发明中的曲面从动件顶部为平面、底部为曲面,曲面从动件的顶部大小与底板的大小相同,所述曲面从动件横截面由上而下逐渐减小,曲面从动件整体形状为底部下凹的倒立梯形台,曲面从动件底部的曲率与偏心轮的曲率大小相同。通过曲面从动件的高度调节整体鱼道的坡度。
23.优选地,本发明中的驱鱼系统在控制系统的调控下智能运行。在同一级鱼道单元中,驱鱼网和网兜做向前运动;在相邻鱼道单元底板趋于同一高度时,驱鱼网和网兜通过卷筒旋转先上升、后下降,驱鱼网和网兜既顺利越过隔板和滚筒排,又加快驱赶和辅助洄游鱼类向上游游动。
24.优选地,本发明由多个驱鱼系统协同工作,每个驱鱼系统达到鱼道出口后,通过回收索道将到达鱼道出口的驱鱼系统快速运输到鱼道入口处归位,保障鱼类通过的连续性和助驱过程的持续性,能够有效提高过鱼效率。
25.优选地,在鱼类非洄游期,还能够利用回收索道快速从下游输送其他物品至上游。
26.本发明提供的技术方案还包括逐级成对上下往复组合式鱼道的过鱼方法,其特征在于包括以下步骤:
27.①
在鱼类洄游季节,由控制系统控制整个鱼道的运行状态,电动机驱动传动轴和偏心轮转动,同时第二级鱼道单元入口两侧固定的滑块与第一级鱼道单元出口两侧固定的滑槽相互滑动,第二级鱼道单元入口处水平固定的滚筒排与第一级鱼道单元出口处垂直固定在底板上的隔板相互滚动;滑块与滑槽滑动,滚筒排与隔板滚动,不仅能够减少摩擦,还能够防止两级鱼道之间漏水;当第一级鱼道单元运行到最高位时,第二级鱼道单元运行到最低位,此时两级鱼道单元底板相齐平,水流由原来的自由跌落转变为平坡明渠水流,水流流速变小;
28.②
在执行步骤
①
的同时,控制系统控制驱鱼系统沿着齿轮带开始向上游运动,驱鱼网和网兜在鱼道单元中对洄游鱼类进行驱赶,辅助洄游性鱼类进行上溯,网兜底部贴近底板,在网兜的重力作用下,驱鱼网处于拉伸状态;当第一级鱼道单元与第二级鱼道单元底板相齐平时,第一级鱼道单元与第二级鱼道单元内的齿轮带也齐平,此时,驱鱼系统中的驱动装置两端的齿轮沿着齿轮带由第一级鱼道单元进入第二级鱼道单元,同时卷筒在控制系统的控制下开始顺时针转动使得驱鱼网开始收缩并上移,同时驱鱼网带动网兜进行上移,网兜辅助一些未成功上溯的鱼类进行洄游;当驱鱼网和网兜进入第二级鱼道单元时,卷筒在控制系统的控制下开始逆时针旋转,驱鱼网和网兜下降至网兜贴近底板的高度;
29.③
其他各级鱼道单元按步骤
①
、
②
的过程依次辅助鱼类进入上一级鱼道单元,直至鱼类成功上溯;
30.④
当洄游鱼类进入最后一级鱼道单元,驱鱼系统继续向前运行,当驱鱼系统抵达鱼道出口处时,驱鱼系统停止运行,同时卷筒开始顺时针旋转,直至驱鱼网被完全收回,当驱鱼网被完全收回时,控制系统控制伸缩杆向下伸长,抓钩抓住驱鱼系统后,伸缩杆开始收缩上移,控制系统控制驱动轮开始转动,驱动轮带动缆绳向下运动,缆绳带动握索器向下游运动,直至将驱鱼系统输送至鱼道入口处,驱动轮停止转动,伸缩杆开始向下运动至合适高度,抓钩张开,将驱鱼系统放置初始位置;驱鱼系统放置初始位置后,卷筒开始逆时针旋转,
开始放下驱鱼网和网兜,直至达到初始状态,同时,驱动轮在控制系统的控制下开始转动,带动缆绳和握索器运动,直至握索器到达鱼道上游出口处,驱动轮停止转动
31.⑤
完成上述所有步骤后,为一个过鱼周期;在多个驱鱼系统的协同工作下,各级鱼道单元按照上述相应步骤逐级辅助洄游鱼类上溯。
32.按照上述相应步骤,即可实现鱼道单元逐级成对上下往复组合过鱼的目的。
33.有益效果:本发明的逐级成对上下往复组合式鱼道及过鱼方法,具有以下有益效果:
34.(1)本发明中的鱼道单元的高程随着偏心轮的转动而改变,使得相邻鱼道单元间的水流流态由急流逐渐转变为缓流,有助于鱼类的洄游上溯。
35.(2)本发明中相邻鱼道单元之间的底坡大于传统鱼道的底坡,有助于极大地缩短鱼道长度,节约建设成本。
36.(3)本发明中相邻的两个偏心轮在转动过程中,上方两个鱼道单元施加在偏心轮上的作用力方向相反,能够巧妙互相抵消,减小了鱼道单元运行过程的动力和能耗。
37.(4)本发明中的滚珠能够将偏心轮与曲面从动件之间的滑动摩擦转变为滚动摩擦,有利于鱼道单元顺利实现升降。
38.(5)本发明的偏心轮与曲面从动件的大小和尺寸能够根据不同的地形地貌进行灵活调整,鱼道结构可根据地形、地貌灵活布置。通过改变偏心轮的直径或曲面从动件的高度能够调整鱼道单元之间的高程差,适应不同的地形特征。
39.(6)本发明中的驱鱼系统能够很好的辅助洄游性鱼类进行洄游,提高过鱼效率。
40.(7)本发明中的滑块与滑槽滑动,滚筒排与隔板滚动,不仅能够减少鱼道单元之间的摩擦力,还能够有效防止两级鱼道之间漏水。
41.(8)本发明中的各个鱼道单元在不运行时是相互独立的,方便维护和保养。
42.(9)本发明由多个驱鱼系统协同工作,保障鱼类通过的连续性和助驱过程的持续性,能够有效提高过鱼效率。
43.(10)本发明的鱼道智能化程度高,能够通过控制系统控制电动机、驱动装置、卷筒、驱动轮、伸缩杆和抓钩的运行状态,适应不同游泳能力的鱼类顺利上溯。
附图说明
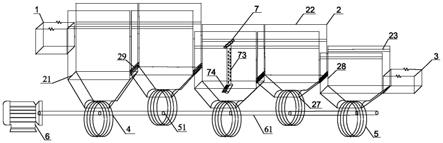
44.图1为本发明的逐级成对上下往复组合式鱼道整体结构示意图;
45.图2为图1鱼道单元全部往复运动半个周期的结构示意图;
46.图3为图1中的鱼道单元的结构示意图;
47.图4为图1中滚筒排、鱼道单元及其下部曲面从动件的结构示意图;
48.图5为本发明中机械传动系统的结构示意图;
49.图6为本发明中偏心轮的结构示意图;
50.图7为本发明中驱鱼系统的结构示意图;
51.图8为本发明中回收索道的结构示意图。
52.图中:1-鱼道出口;2-鱼道单元;21-底板;22-翼墙;23-齿轮带;24-滑槽;25-滑块;26-凹槽;27-曲面从动件;28-隔板;29-滚筒排;3-鱼道进口;4-机械传动系统;5-偏心轮;51-轴孔;52-滚珠;53-曲面滑道;6-电动机;61-传动轴;7-驱鱼系统;71-驱动装置;72-卷
筒;73-驱鱼网;74-网兜;75-控制系统;8-回收索道;81-驱动轮;82-缆绳;83-握索器;84-伸缩杆;85-抓钩。
具体实施方式
53.下面结合附图1~8对本发明的技术方案作更进一步的描述。
54.实施例:
55.一种逐级成对上下往复组合式鱼道,包括五个鱼道单元2、一个机械传动系统4、两个驱鱼系统7、一个控制系统75和一个回收索道8。其中,鱼道单元2由底板21、翼墙22、齿轮带23、滑槽24、滑块25、凹槽26、曲面从动件27、隔板28和滚筒排29组成。底板21为长方形,水平固定在鱼道单元2底部。鱼道两翼墙22垂直固定在鱼道底板21的左右两侧,翼墙22内侧设有齿轮带23,齿轮带23的长度与翼墙22的长度相同。翼墙22的前端设置有滑槽24、后端设置有滑块25,滑槽24形状像槽钢、底部密封、开口向外、高度低于齿轮带23且垂直固定在鱼道单元2的出口处两侧。在上游最后一个鱼道单元2出口处不设置滑槽。滑块25是一个长方体实心块,与滑槽24组合使用,滑块25能插入滑槽24中并上下滑动。滑块25垂直固定在鱼道单元2的入口两侧,滑块25底部固定在鱼道单元2的底板21上部。曲面从动件27位于底板21下部,曲面从动件27底部横向设置有凹槽26。隔板28垂直设置在第二个、第四个鱼道单元2的底板21前后两端,并与左右两侧的翼墙22固定连接。滚筒排29分别水平固定在第三个鱼道单元2进口和出口两端以及第一个鱼道单元2的出口和第五个鱼道单元2的进口,滚筒排29底部与底板21相切,滚筒排29外圈材料采用耐磨损橡胶。机械传动系统4由五个偏心轮5、一个电动机6和一个传动轴61组成。偏心轮5为圆柱形结构,偏心轮5位于曲面从动件27正下方,并与曲面从动件27的凹槽26滑动接触,偏心轮5外表面设有曲面滑道53,曲面滑道53内安装有若干个滚珠52,偏心轮5设有轴孔51,滚珠52采用不锈钢实心球体。电动机6的转轴与传动轴61通过减速齿轮组相连,传动轴61穿过全部偏心轮5的轴孔51并与轴孔51固定连接。
56.驱鱼系统7由驱动装置71、卷筒72、驱鱼网73、网兜74和控制系统75组成,驱动装置71由控制系统75调控。驱动装置71包括驱动电机以及与驱动电机相连接的驱动轴和齿轮,齿轮在运动中与齿轮带23相啮合。相邻鱼道单元运行至同一高度时,相邻鱼道单元2的齿轮带23正好衔接,驱动装置71顺利通过衔接的齿轮带23。卷筒72与驱鱼网73上端相连接,卷筒72在驱动装置71的驱动下能够适时收放驱鱼网73。驱鱼网73采用高强度碳纤维柔性材料,驱鱼网73上端与卷筒72固定、下端与网兜74固定。网兜74边框材料为实心不锈钢,网兜74形状为布满小孔的簸箕形状,网兜74依靠自身重力将驱鱼网73展开,网兜74敞口端形状为长方形,网兜74敞口端底部向上仰起。控制系统75控制电动机6、驱动装置71、卷筒72、驱动轮81、伸缩杆84和抓钩85的运行状态。回收索道8由驱动轮81、缆绳82、握索器83、伸缩杆84和抓钩85组成。驱动轮81为表面设有凹槽的不锈钢圆柱,缆绳82束缚在驱动轮81的凹槽内。握索器83固定在缆绳82上,伸缩杆84能够上下伸缩,伸缩杆84上端与握索器83相连,下端与抓钩85相连,抓钩85能够自由缩放。
57.在本实施例中,曲面从动件27顶部为平面、底部为曲面,曲面从动件27的顶部大小与底板21的大小相同,曲面从动件27横截面由上而下逐渐减小,曲面从动件27整体形状为底部下凹的倒立梯形台,曲面从动件27底部的曲率与偏心轮5的曲率大小相同。
58.在本实施例中,偏心轮5外表面设有下凹式的曲面滑道53,曲面滑道53内布设有若
干个滚珠52,曲面滑道53通过滚珠52与曲面从动件27底部横向设置的凹槽26滚动接触。
59.在本实施例中,鱼道单元2的底板21整体的高度自上游向下游递减,相邻鱼道单元2的底板21的最大高度差值等于偏心轮5远毂半径与近毂半径的差值,相邻鱼道单元2的底板21的最小高度差值等于零。偏心轮5通过传动轴61穿过轴孔51连接,相邻偏心轮5的最高点到传动轴61的垂直距离分别为偏心轮5的远毂半径与近毂半径。
60.在本实施例中,滑槽24与滑块25相嵌滑动衔接,上一级鱼道单元2的滑块25嵌入下一级鱼道单元2的滑槽24中并相互滑动,相邻鱼道单元2的滚筒排29的每根滚筒均与隔板28相切并相互滚动。
61.一种基于上述的逐级成对上下往复组合式鱼道,通过控制系统75智能执行鱼道运行过程,将鱼群逐级输送至上游,本实施例中过鱼方法包括以下步骤:
62.①
在鱼类洄游季节,由控制系统75控制整个鱼道的运行状态,电动机6驱动传动轴61和偏心轮5转动,同时第二级鱼道单元入口两侧固定的滑块25与第一级鱼道单元出口两侧固定的滑槽24相互滑动,第二级鱼道单元入口处水平固定的滚筒排29与第一级鱼道单元出口处垂直固定在底板21上的隔板28相互滚动。当第一级鱼道单元运行到最高位时,第二级鱼道单元运行到最低位,此时两级鱼道单元底板21相齐平,水流由原来的自由跌落转变为平坡明渠水流,水流流速变小;
63.②
在执行步骤
①
的同时,控制系统75控制驱鱼系统7沿着齿轮带23开始向上游运动,驱鱼网73和网兜74在鱼道单元中对洄游鱼类进行驱赶,辅助洄游性鱼类进行上溯,网兜74底部贴近底板21,在网兜74的重力作用下,驱鱼网73处于拉伸状态。当第一级鱼道单元与第二级鱼道单元底板21相齐平时,第一级鱼道单元与第二级鱼道单元内的齿轮带23也齐平,此时,驱鱼系统7中的驱动装置71两端的齿轮沿着齿轮带23由第一级鱼道单元进入第二级鱼道单元,同时卷筒72在控制系统75的控制下开始顺时针转动使得驱鱼网73开始收缩并上移,同时驱鱼网73带动网兜74进行上移,网兜74辅助一些未成功上溯的鱼类进行洄游;当驱鱼网73和网兜74进入第二级鱼道单元时,卷筒72在控制系统75的控制下开始逆时针旋转,驱鱼网73和网兜74下降至网兜74贴近底板21的高度;
64.③
其他各级鱼道单元按步骤
①
、
②
的过程依次辅助鱼类进入上一级鱼道单元,直至鱼类成功上溯;
65.④
当洄游鱼类进入最后一级鱼道单元,驱鱼系统7继续向前运行,当驱鱼系统7抵达鱼道出口处时,驱鱼系统7停止运行,同时卷筒72开始顺时针旋转,直至驱鱼网73被完全收回,当驱鱼网73被完全收回时,控制系统75控制伸缩杆84向下伸长,抓钩85抓住驱鱼系统7后,伸缩杆84开始收缩上移,控制系统75控制驱动轮81开始转动,驱动轮81带动缆绳82向下运动,缆绳82带动握索器83向下游运动,直至将驱鱼系统7输送至鱼道入口处,驱动轮81停止转动,伸缩杆84开始向下运动至合适高度,抓钩85张开,将驱鱼系统7放置初始位置。驱鱼系统7放置初始位置后,卷筒72开始逆时针旋转,开始放下驱鱼网73和网兜74,直至达到初始状态,同时,驱动轮81在控制系统75的控制下开始转动,带动缆绳82和握索器83运动,直至握索器83到达鱼道上游出口处,驱动轮81停止转动;
66.⑤
完成上述所有步骤为一个过鱼周期,在多个驱鱼系统7的协同工作下,各级鱼道单元按照上述相应步骤逐级辅助洄游鱼类上溯。
67.以上所述仅是本发明的优选实施方式,应当指出:所描述的实施例仅仅是本发明
的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1